一种巡检机器人系统的制作方法
1.本实用新型涉及高速公路维护设备领域,具体属于一种巡检设备,尤其涉及一种巡检机器人系统。
背景技术:
2.高速公路是一项重要的基建项目,高速公路的建设不仅能够大大的减少目标两地之间的通行时长,让老百姓的通行更加方便,还能极大的带动沿线经济,促使第三产业迅速繁荣,带来旅游业发展的“黄金机遇”,从而大大提升城市品位,增加知名度和对外开放程度。随着高速公路的逐渐普及,对高速公路的巡检工作也愈发重要起来。由于常年使用且使用强度较大,高速公路不可避免的会存在一些安全隐患,如果不能第一时间准确掌握路面的损坏信息并及时补修,很容易造成恶劣的交通事故。在高速公路基数较少的情况下,尚可以采用人工巡检的方式,但是随着高速公路总公里数的增加,需要大量的人工参与,费时费力还容易出差错。
3.为此,能够替代人工进行巡检工作的巡检机器人被研发了出来。高速公路的中间通常具有分隔两个方向车道的隔离带,现有的巡检机器人通常自带动力源,并能沿着隔离带中的护栏移动,借助于自身集成的多种传感器、视觉系统、声音采集系统等,能够及时掌握路面的情况,甚至能兼顾路段的事故信息采集,十分实用。但是现有的巡检机器人通常采用蓄电池作为电机的动力来源,传统的巡检机器人,在使用一段时间之后,需要电源为蓄电池充电,这个过程仍然需要人工干预,从而导致无法普及;
4.为此一部分巡检机器人通过增设太阳能板等模块,期望摆脱固定线位的依赖,例如专利号为cn201920866132.0的中国实用新型专利就公开了《一种高速公路应急车道巡检机器人》,该巡检机器人中,外壳一的顶部设置有安装槽一和安装槽二,安装槽一的内侧壁上固定连接有太阳能板,虽然在一定程度上减少了插电充电的次数,但是缺陷明显:
5.1、太阳能板的充电效率较低,有限的充电时长很难满足蓄电池的充电需求;
6.2、在高速公路恶劣的工况下,太阳能板会积累大量的灰尘,对太阳光的收集产生影响;
7.3、太阳能充电仍然需要巡检机器人移动至固定的充电位置,需要较高的对准精度,充电过程中很容易因为车辆的快速通过而带来较大的外界风力干扰,从而导致巡检机器人偏移预设的充电位置。
技术实现要素:
8.本实用新型所要解决的第一个技术问题是针对现有技术的现状,提供一种能够自动完成充电且精准定位无线充电位置的巡检机器人系统。
9.本实用新型所要解决的第二个技术问题是针对现有技术的现状,提供一种在定位的同时能够对巡检机器人本体进行姿态纠偏的巡检机器人系统。
10.本实用新型解决上述第一个技术问题所采用的技术方案为:一种巡检机器人系
统,包括:
11.基站,具有无线充电发射模块;
12.巡检机器人本体,具有能与无线充电发射模块电连接的无线充电接收模块,布置在与基站相对的另外一侧,且该巡检机器人本体能相对基站横向移动,以使巡检机器人本体与基站错位或者至少局部重叠;
13.定位组件,包括设于基站上的第一定位件和设于巡检机器人本体上的第二定位件,所述第一定位件和第二定位件中的其中一个为磁性件,另一个为磁性件或者导磁件,在所述巡检机器人本体移动至与基站至少局部重叠的状态下,所述第一定位件和第二定位件磁性吸合,以使无线充电接收模块与无线充电发射模块正对而电连接。
14.为了确保磁性吸合的强度和定位速度,优选地,所述第一定位件和第二定位件均为磁性件,且二者相互邻近的磁极为异性磁极。
15.两个定位件可以是在各自表面直接设置,但是可能会因为其它部件的干预导致很难靠近不便,因此为了确保两个定位件能够足够的靠近而发生相互作用,优选地,所述基站的上部具有侧向延伸的连接板,所述连接板的延伸方向与巡检机器人本体的移动方向相交叉,所述第一定位件设于所述连接板上。
16.具体地,所述连接板设于基站的顶部,且其自由端具有向下弯折的侧板,所述第一定位件设于所述侧板与基站相邻近的内侧且与基站的侧壁之间留有间隔形成作用区间。
17.优选地,所述巡检机器人本体的顶部具有竖向延伸的连接座,所述第二定位件设于该定位座上,且在巡检机器人本体移动至与基站重叠的状态下,所述连接座和第二定位件均位于作用区间内。
18.为了进一步解决上述第二个技术问题,本实用新型所采用的技术方案为:所述第一定位件在邻近作用区间的内侧具有第一作用面,所述第二定位件对应具有第二作用面,并且,在所述第一定位件和第二定位件磁性吸合的状态下,所述第一作用面和第二作用面相互平行。这样两个作用面的设计,因为第一定位件固定在基站上,其位置和角度是相对固定的,当巡检机器人本体滑移至基站处时,两个定位件瞬间实现磁性吸合,凭借着第一作用面和第二作用面的相互作用,第一定位件就能反作用于第二定位件上,从而实现对巡检机器人本体姿态的纠正,使其恢复至预设的运行角度,避免部分元件因为角度偏斜造成的非正常磨损。当然,为了进一步确保定位效果,上述的两个定位件优选为圆形磁铁,这样定位效果更加理想。
19.为了便于两个定位件相对滑动,优选地,沿着第二定位件的滑动方向,所述第一定位件在第一作用面的上游和下游均具有与第一作用面衔接的导向面。
20.为了避免巡检机器人本体上下产生偏斜,优选地,所述基站的顶部还具有加强板,所述加强板的横截面呈l形,l形的两个直角边分别连接在连接板和侧板的外侧。加强板的设计,对连接板和侧板实现了加固,当倾斜后的巡检机器人本体上的第二定位件与第一定位件磁性吸合后,凭借着磁吸作用力和移动的惯性,就能使整个巡检机器人本体重新恢复竖直。
21.具体地,所述加强板在连接板处的厚度自连接板的固定端至自由端逐渐增大。
22.优选地,所述加强板至少有两个,各所述加强板沿着巡检机器人本体的移动方向间隔布置。
23.与现有技术相比,本实用新型的优点在于:该巡检机器人系统中,通过定位组件中,通过在基站和巡检机器人本体上分别安装第一定位件和第二定位件,使得巡检机器人本体在移动至与基站局部重叠时,第一定位件和第二定位件磁性吸合在一起,这样无需专门的对中装置,就能促使基站上的无线充电发射模块与巡检机器人本体上的无线充电接收模块准确的定位在一起,从而满足无线充电模块发射端与接收端的距离要求,无需人工干预就能自动充电。
附图说明
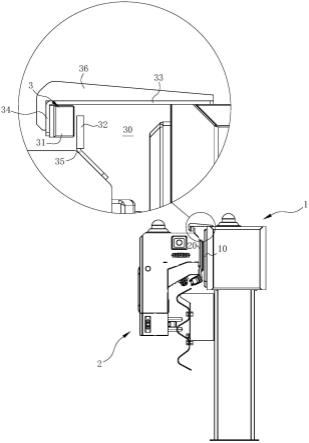
24.图1为本实用新型实施例中巡检机器人系统的整体结构示意图;
25.图2为巡检机器人本体的整体结构示意图;
26.图3为基站的整体示意图;
27.图4为图3另一角度的整体示意图;
28.图5为本实用新型实施例中巡检机器人系统的整体结构示意图(侧视)。
具体实施方式
29.以下结合附图实施例对本实用新型作进一步详细描述。
30.如图1至图5所示,为本实用新型的一个优选实施例,在本实施例中,该巡检机器人系统包括基站1、巡检机器人本体2和定位组件3。以高速公路作为使用具体场景进行示例,高速公路行车道的中部具有隔离带,在隔离带处具有用来分隔不同行车道的防护栏,上述的基站1通常设于隔离带处,而巡检机器人本体2自带动力,通常是布置在与基站1相对的另外一侧,且能沿着护栏移动并进行巡检工作(即该巡检机器人本体2能相对基站1横向移动)。
31.本实施例中与常规巡检机器人相同之处是都需要在基站1处进行集中充电处理,不同之处则是本实施例中的巡检机器人系统采用了无线充电的模式。其中,在基站1上设置有无线充电发射模块10,而在巡检机器人本体2上设置有能与无线充电发射模块10电连接的无线充电接收模块20。由于无线充电时,发射端和接收端的距离和位置都会大大的影响充电效率甚至是成功率,因此,当巡检机器人本体2电量不能满足下次巡检时,预设程序就会自动驱使其移动至基站1处,即巡检机器人本体2的移动会与基站1形成两种位置状态,错位或者至少局部重叠,其巡检时相当于与基站1错位,充电时则是至少局部重叠(优选为并排)。
32.在本实施例中,上述的定位组件3能够有效避免无线充电发射端和接收端对接不到位导致充电失败的情况,该定位组件3包括设于基站1上的第一定位件31和设于巡检机器人本体2上的第二定位件32,第一定位件31和第二定位件32中的其中一个为磁性件,另一个为磁性件或者导磁件,在巡检机器人本体2移动至与基站1至少局部重叠的状态下,第一定位件31和第二定位件32磁性吸合,以使无线充电接收模块20与无线充电发射模块10正对而电连接。为了确保磁性的强度和定位速度,上述第一定位件31和第二定位件32均为磁性件,且二者相互邻近的磁极为异性磁极。
33.实现两个定位件磁性吸合的连接结构有多种,在本实施例中,上述基站1的上部具有侧向延伸的连接板33,连接板33的延伸方向与巡检机器人本体2的移动方向相交叉,第一
定位件31设于连接板33上。具体而言,连接板33设于基站1的顶部,且其自由端具有向下弯折的侧板34,第一定位件31设于侧板34与基站1相邻近的内侧且与基站1的侧壁之间留有间隔形成作用区间30。为了与第一定位件31实现配合,上述巡检机器人本体2的顶部具有竖向延伸的连接座35,第二定位件32设于该定位座上,且在巡检机器人本体2移动至与基站1重叠的状态下,连接座35和第二定位件32均位于作用区间30内。
34.除了实现无线充电模块发射端和接收端的精准定位之外,两个定位件的磁性吸合还能对巡检机器人本体的运行姿态进行有效纠正。上述第一定位件31在邻近作用区间30的内侧具有第一作用面3a,第二定位件32对应具有第二作用面3b,并且,在第一定位件31和第二定位件32磁性吸合的状态下,第一作用面3a和第二作用面3b相互平行。为了确保滑动顺畅,沿着第二定位件32的滑动方向,第一定位件31在第一作用面3a的上游和下游均具有与第一作用面3a衔接的导向面3c。当然,由于巡检机器人本体负载后,具有一定的重量,在运行一段时间后很有可能产生上下的偏斜,从而使第一定位件31位于第二定位件32的移动路径上。因此,上述姿态纠正的另一部分是针对上下倾斜的情况进行调整,凭借着磁吸的作用力和巡检机器人本体运行的惯性,使第二定位件32的端部与第一定位件31撞击后扭转竖向的偏斜角度,从而顺利滑入至作用区间30内,使两个定位件重新回到并排的状态。当然鉴于磁性件自身通常较为脆弱,上述的第一定位件31和第二定位件32并不一定是直接接触,本技术中为了明确磁性吸合的结构特点,采用了简述的形式以便于理解,但实际生产过程中,可以考虑在磁性件的外部套设柔性套等保护,或者采用其他形式的间隔也可。
35.为了确保导向部分的强度,在基站1的顶部还具有加强板36,加强板36的横截面呈l形,l形的两个直角边分别连接在连接板33和侧板34的外侧。具体而言,加强板36在连接板33处的厚度自连接板33的固定端至自由端逐渐增大。本实施例中的加强板36至少有两个,各加强板36沿着巡检机器人本体2的移动方向间隔布置。
36.此外,在本实用新型的说明书及权利要求书中使用了表示方向的术语,诸如“前”、“后”、“上”、“下”、“左”、“右”、“侧”、“顶”、“底”等,用来描述本实用新型的各种示例结构部分和元件,但是在此使用这些术语只是为了方便说明的目的,是基于附图中显示的示例方位而确定的。由于本实用新型所公开的实施例可以按照不同的方向设置,所以这些表示方向的术语只是作为说明而不应视作为限制,比如“上”、“下”并不一定被限定为与重力方向相反或一致的方向。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1