电池充电站的制作方法
1.本实用新型涉及电池领域,特别涉及一种电池充电站。
背景技术:
2.在建筑施工行业中,有较多场景可以采用建筑机器人进行施工。每个建筑机器人包括电池,每个在工作一定时长后,需要对电池进行充电。
3.相关技术中,各个机器人在需要充电时需要到达各自对应的临时充电场所,当机器人数量较多时,整体的充电管理效率较低。
技术实现要素:
4.本实用新型提供一种电池充电站,能够提高多个机器人的总体充电效率。
5.本实用新型实施例提供一种电池充电站,用于对机器人的电池充电,所述电池充电站包括:主充电工位,能够与外部供电源电连接,所述主充电工位包括第一充电接口、第一电控柜以及第一断电按钮,所述第一充电接口设置于所述第一电控柜,所述第一断电按钮设置于所述第一电控柜表面;以及多个次充电工位,所述多个次充电工位依次连接为串联结构,位于所述串联结构中首端的所述次充电工位与所述主充电工位电连接,每个所述次充电工位包括第二充电接口,所述第一充电接口、所述第二充电接口分别能够电连接所述电池并向所述电池充电,所述第一断电按钮被配置为在触发后使得所述主充电工位和全部所述次充电工位断电。
6.根据本实用新型实施例的电池充电站,包括主充电工位和多个次充电工位,主充电工位包括第一充电接口,次充电工位包括第二充电接口,第一充电接口、第二充电接口分别能够电连接电池并向电池充电。在机器人数量较多时,多个机器人的电池可以分别连接第一充电接口或第二充电接口进行充电,使得电池充电站能够同时容纳多个机器人的电池并充电,提高对多个机器人的电池的总体充电效率。多个次充电工位依次连接为串联结构,根据需要充电的机器人的电池的数量,能够灵活调整电池充电站包括的次充电工位的数量,使得电池充电站满足相应数量机器人的充电需求,也提高电池充电站对各种数量待充电机器人群体的兼容性。主充电工位包括第一断电按钮,该第一断电按钮被配置为在触发后使得主充电工位和全部次充电工位断电。通过设置第一断电按钮,使得机器人充电站具有充电异常断电管理功能,在遇到较严重的异常时,触发第一断电按钮即可使得机器人充电站的全部工位断电,提高机器人充电站在使用过程中的安全性。
7.根据本实用新型的前述任一实施方式,所述主充电工位还包括:第一充电框架,所述第一充电框架具有第一承载面,所述第一承载面能够承载所述电池,所述第一电控柜与所述第一充电框架连接;第一感应器,安装于所述第一充电框架,所述第一感应器用于检测所述第一承载面上是否承载有所述电池。
8.上述实施方式中,主充电工位包括第一感应器,第一感应器用于检测第一承载面上是否承载有电池。主充电工位可以配置为在第一感应器检测到有电池放置在第一承载面
上时允许对电池正常充电,从而进一步提高主充电工位对电池充电的安全性。
9.根据本实用新型的前述任一实施方式,所述主充电工位还包括:热成像装置,安装于所述第一电控柜,所述热成像装置能够采集在所述主充电工位处以及在所述次充电工位处充电的所述电池的热成像信息;提示装置,设置于所述第一电控柜,所述提示装置用于产生声音提示。
10.上述实施方式中,主充电工位包括热成像装置,热成像装置能够采集在主充电工位处以及在次充电工位处充电的电池的热成像信息,即热成像装置能够对整个电池充电站进行视频监控和感温监控,便于及时发现异常,例如能够及时检测到充电过程中电池温度超过设定温度,以便于后续及时对充电过程的安全处理。主充电工位包括提示装置,提示装置用于产生声音提示。例如在热成像装置发现电池充电异常时,通过提示装置产生报警提示,电池充电站可以控制断开向电池的充电输出,实现断电功能等,保证电池充电站使用的安全性。
11.根据本实用新型的前述任一实施方式,所述主充电工位还包括:第一充电旋钮,设置于所述第一电控柜,所述第一充电旋钮用于触发使得所述第一充电接口向所述电池充电;第一指示灯,设置于所述第一电控柜,并位于所述第一充电旋钮一侧;第一行走组件,设置于所述第一充电框架底部,用于带动所述第一充电框架移动。
12.上述实施方式中,主充电工位包括第一行走组件,其设置于第一充电框架底部,用于带动第一充电框架移动,从而使得主充电工位可移动,便于对电池充电站的主充电工位的物理位置进行灵活配置,提高电池充电站的使用便利性。
13.根据本实用新型的前述任一实施方式,所述次充电工位还包括:第二电控柜,所述第二充电接口设置于所述第二电控柜;第二断电按钮,设置于所述第二电控柜表面,所述第二断电按钮被配置为在触发后使得所述串联结构中已触发所述第二断电按钮所在的所述次充电工位及之后的所述次充电工位断电。
14.上述实施方式中,次充电工位包括第二断电按钮,该第二断电按钮被配置为在触发后使得串联结构中已触发第二断电按钮所在的次充电工位及之后的次充电工位断电。通过设置第二断电按钮,使得机器人充电站具有更精确的充电异常断电管理功能,在遇到局部的异常时,触发第二断电按钮即可使得机器人充电站的局部异常的工位断电,更精准地提高机器人充电站在使用过程中的安全性。
15.根据本实用新型的前述任一实施方式,所述次充电工位还包括:第二充电框架,所述第二充电框架具有第二承载面,所述第二承载面能够承载所述电池,所述第二电控柜与所述第二充电框架连接;第二感应器,安装于所述第二充电框架,所述第二感应器用于检测所述第二承载面上是否承载有所述电池。
16.上述实施方式中,次充电工位包括第二感应器,第二感应器用于检测第二承载面上是否承载有电池。次充电工位可以配置为在第二感应器检测到有电池放置在第二承载面上时允许对电池正常充电,从而进一步提高次充电工位对电池充电的安全性。
17.根据本实用新型的前述任一实施方式,所述次充电工位还包括:第二充电旋钮,设置于所述第二电控柜,所述第二充电旋钮用于触发使得所述第二充电接口向所述电池充电;第二指示灯,设置于所述第二电控柜,并位于所述第二充电旋钮一侧;第二行走组件,设置于所述第二充电框架底部,用于带动所述第二充电框架移动。
18.上述实施方式中,次充电工位包括第二行走组件,其设置于第二充电框架底部,用于带动第二充电框架移动,从而使得次充电工位可移动。当次充电工位数量较多时,由于各次充电工位可移动,更便于对电池充电站的多个次充电工位的物理位置进行灵活配置,提高电池充电站的使用便利性。
19.根据本实用新型的前述任一实施方式,所述主充电工位还包括:工控机,设置于所述第一电控柜;第一通讯接口,设置于所述第一电控柜,所述第一通讯接口用于连接所述电池的通讯线,所述第一通讯接口与所述工控机电连接,所述次充电工位还包括:第二通讯接口,设置于所述第二电控柜,所述第二通讯接口用于连接所述电池的通讯线,所述第二通讯接口与所述工控机电连接。
20.上述实施方式中,主充电工位包括工控机和第一通讯接口,次充电工位包括第二通讯接口,第一通讯接口、第二通讯接口都能连接电池的通讯线,并与工控机电连接,使得工控机能够经由第一通讯接口、第二通讯接口读取正在充电的电池的电池信息,例如获取电池的所属机器人、是否正常充电以及实时电量等,便于对多个机器人的电池进行充电信息管理。
21.根据本实用新型的前述任一实施方式,所述主充电工位、所述次充电工位分别还包括通信模块,所述工控机包括:显示器,用于显示交互界面;以及管理模块,与所述主充电工位的所述通信模块、所述第一通讯接口电连接,与所述次充电工位的所述通信模块、所述第二通讯接口电连接,以及与所述显示器电连接,所述管理模块能够检测与所述通信模块的通讯状态,以及能够通过所述第一通讯接口、所述第二通讯接口获得所述电池的充电信息。
22.上述实施方式中,工控机包括管理模块,管理模块能够检测与通信模块的通讯状态,以及能够通过第一通讯接口、第二通讯接口获得电池的充电信息,从而实现对电池充电站的主充电工位及各次充电工位的状态监控和管理,还能实现对电连接于主充电工位或次充电工位的电池的状态监控和管理。工控机还包括显示器,显示器能够显示交互界面,以将上述状态监控和管理的相关信息进行显示,便于管理和展示电池充电站以及与电池充电站连接的电池的多种信息。
23.根据本实用新型的前述任一实施方式,所述主充电工位还包括:第一插头,从所述第一电控柜向外延伸,所述第一插头用于与外部供电源电连接;第一插座,设置于所述第一电控柜,所述次充电工位还包括:第二插座,设置于所述第二电控柜;第二插头,从所述第二电控柜向外延伸,所述第二插头能够与所述第一插座或与另一所述次充电工位的所述第二插座电连接。
24.上述实施方式中,主充电工位包括第一插头、第一插座,次充电工位包括第二插头、第二插座。通过设置第一插头,便于整个电池充电站与外部供电源连接,获取充电来源。通过设置第一插座和第二插座,便于多个次充电工位连接更加灵活的串联结构,提高对各种数量待充电机器人群体的兼容性。
附图说明
25.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅
是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
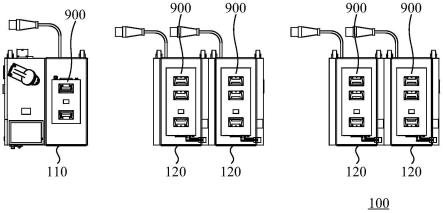
26.图1为本实用新型电池充电站一实施例的俯视示意图;
27.图2为本实用新型电池充电站一实施例的结构示意框图;
28.图3为本实用新型电池充电站一实施例中主充电工位的立体示意图;
29.图4为本实用新型电池充电站一实施例中主充电工位的侧视示意图;
30.图5为本实用新型电池充电站一实施例中次充电工位的立体示意图;
31.图6为本实用新型电池充电站一实施例中次充电工位的侧视示意图;
32.图7为本实用新型电池充电站一实施例中工控机显示器显示的交互界面示意图。
33.附图标号说明:
34.100-电池充电站;
35.110-主充电工位;111-第一充电接口;112-第一电控柜;113-第一充电框架;1131-第一承载面;114-第一感应器;115-热成像装置;116-提示装置;117-第一行走组件;118-工控机;1191-第一断电按钮;1192-第一充电旋钮;1193-第一指示灯;1194-第一通讯接口;1195-第一插头;1196-第一插座;1197-第一散热风扇;
36.120-次充电工位;121-第二充电接口;122-第二电控柜;123-第二充电框架;1231-第二承载面;124-第二感应器;127-第二行走组件;1291-第二断电按钮;1292-第二充电旋钮;1293-第二指示灯;1294-第二通讯接口;1295-第二插头;1296-第二插座;1297-第二散热风扇;
37.800-外部供电源;
38.900-电池;910-电池充电器。
39.本实用新型目的的实现、功能特点及优点将结合实施例,参阅附图做进一步说明。
具体实施方式
40.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型的一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
41.需要说明,本实用新型实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
42.另外,在本实用新型中涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本实用新型要求的保护范围之内。
43.本实用新型实施例提供一种电池充电站,该电池充电站对机器人的电池充电,在下文中,将以机器人是建筑机器人为例对电池充电站进行说明,本实用新型实施例的电池
充电站也能适用于对其它机器人的电池的充电工作。建筑机器人具体可以包括墙砖铺贴机器人、通用物流机器人、室内辊涂机器人、楼层清洁机器人等。
44.图1为本实用新型电池充电站一实施例的俯视示意图,图2为本实用新型电池充电站一实施例的结构示意框图。电池充电站100用于对机器人的电池900充电,电池充电站100包括主充电工位110以及多个次充电工位120。
45.图3为本实用新型电池充电站一实施例中主充电工位的立体示意图,图4为本实用新型电池充电站一实施例中主充电工位的侧视示意图。主充电工位110能够与外部供电源800电连接。主充电工位110包括第一充电接口111。
46.图5为本实用新型电池充电站一实施例中次充电工位的立体示意图,图6为本实用新型电池充电站一实施例中次充电工位的侧视示意图。多个次充电工位120依次连接为串联结构,位于串联结构中首端的次充电工位120与主充电工位110电连接。每个次充电工位120包括第二充电接口121。第一充电接口111、第二充电接口121分别能够电连接电池900并向电池900充电。
47.根据本实用新型实施例的电池充电站100,包括主充电工位110和多个次充电工位120,主充电工位110包括第一充电接口111,次充电工位120包括第二充电接口121,第一充电接口111、第二充电接口121分别能够电连接电池900并向电池900充电。在机器人数量较多时,多个机器人的电池900可以分别连接第一充电接口111或第二充电接口121进行充电,使得电池充电站100能够同时容纳多个机器人的电池900并充电,提高对多个机器人的电池900的总体充电效率。多个次充电工位120依次连接为串联结构,根据需要充电的机器人的电池900的数量,能够灵活调整电池充电站100包括的次充电工位120的数量,使得电池充电站100满足相应数量机器人的充电需求,也提高电池充电站100对各种数量待充电机器人群体的兼容性。
48.如图3和图4,在本实施例中,主充电工位110还包括第一电控柜112、第一断电按钮1191。第一充电接口111设置于第一电控柜112。第一断电按钮1191设置于第一电控柜112表面,第一断电按钮1191被配置为在触发后使得主充电工位110和全部次充电工位120断电。
49.在上述本实用新型实施例的电池充电站100中,主充电工位110包括第一断电按钮1191,该第一断电按钮1191被配置为在触发后使得主充电工位110和全部次充电工位120断电。通过设置第一断电按钮1191,使得机器人充电站具有充电异常断电管理功能,在遇到较严重的异常时,触发第一断电按钮1191即可使得机器人充电站的全部工位断电,提高机器人充电站在使用过程中的安全性。
50.在一些实施例中,主充电工位110还包括第一充电框架113,第一充电框架113具有第一承载面1131,第一承载面1131能够承载电池900。第一电控柜112与第一充电框架113连接。主充电工位110还包括第一感应器114,第一感应器114安装于第一充电框架113,第一感应器114用于检测第一承载面1131上是否承载有电池900。第一感应器114例如是接近开关。
51.在上述实施例中,主充电工位110包括第一感应器114,第一感应器114用于检测第一承载面1131上是否承载有电池900。主充电工位110可以配置为在第一感应器114检测到有电池900放置在第一承载面1131上时允许对电池900正常充电,从而进一步提高主充电工位110对电池900充电的安全性。
52.在一些实施例中,电池900通过电池充电器910与第一充电接口111电连接,电池充
电器910可以放置于第一充电框架113。
53.在一些实施例中,主充电工位110还包括热成像装置115,热成像装置115安装于第一电控柜112。热成像装置115能够采集在主充电工位110处以及在次充电工位120处充电的电池900的热成像信息。主充电工位110还包括提示装置116,提示装置116设置于第一电控柜112,提示装置116用于产生声音提示。提示装置116例如是蜂鸣器,也可以是其它可产生声音的提示装置。
54.在上述实施例中,主充电工位110包括热成像装置115,热成像装置115能够采集在主充电工位110处以及在次充电工位120处充电的电池900的热成像信息,即热成像装置115能够对整个电池充电站100进行视频监控和感温监控,便于及时发现异常,例如能够及时检测到充电过程中电池900温度超过设定温度,以便于后续及时对充电过程的安全处理。主充电工位110包括提示装置116,提示装置116用于产生声音提示。例如在热成像装置115发现电池900充电异常时,通过提示装置116产生报警提示,电池充电站100可以控制断开向电池900的充电输出,实现断电功能等,保证电池充电站100使用的安全性。
55.在一些实施例中,主充电工位110还包括第一充电旋钮1192,第一充电旋钮1192设置于第一电控柜112,第一充电旋钮1192用于触发使得第一充电接口111向电池900充电。主充电工位110还包括第一指示灯1193,第一指示灯1193设置于第一电控柜112,并位于第一充电旋钮1192一侧。主充电工位110还包括第一行走组件117,第一行走组件117设置于第一充电框架113底部,用于带动第一充电框架113移动。本实施例中,第一行走组件117包括多个滚轮,在其它一些实施例中,第一行走组件117可以是其它形式,例如是履带行走装置。
56.在上述实施例中,主充电工位110包括第一行走组件117,其设置于第一充电框架113底部,用于带动第一充电框架113移动,从而使得主充电工位110可移动,便于对电池充电站100的主充电工位110的物理位置进行灵活配置,提高电池充电站100的使用便利性。
57.如图5和图6,次充电工位120还包括第二电控柜122,第二充电接口121设置于第二电控柜122。次充电工位120还包括第二断电按钮1291,第二断电按钮1291设置于第二电控柜122表面,第二断电按钮1291被配置为在触发后使得串联结构中已触发第二断电按钮1291所在的次充电工位120及之后的次充电工位120断电。
58.在上述实施例中,次充电工位120包括第二断电按钮1291,该第二断电按钮1291被配置为在触发后使得串联结构中已触发第二断电按钮1291所在的次充电工位120及之后的次充电工位120断电。通过设置第二断电按钮1291,使得机器人充电站具有更精确的充电异常断电管理功能,在遇到局部的异常时,触发第二断电按钮1291即可使得机器人充电站的局部异常的工位断电,更精准地提高机器人充电站在使用过程中的安全性。
59.在一些实施例中,次充电工位120还包括第二充电框架123,第二充电框架123具有第二承载面1231,第二承载面1231能够承载电池900。第二电控柜122与第二充电框架123连接。次充电工位120还包括第二感应器124,第二感应器124安装于第二充电框架123,第二感应器124用于检测第二承载面1231上是否承载有电池900。第二感应器124例如是接近开关。
60.在上述实施例中,次充电工位120包括第二感应器124,第二感应器124用于检测第二承载面1231上是否承载有电池900。次充电工位120可以配置为在第二感应器124检测到有电池900放置在第二承载面1231上时允许对电池900正常充电,从而进一步提高次充电工位120对电池900充电的安全性。
61.在一些实施例中,电池900通过电池充电器910与第二充电接口121电连接,电池充电器910可以放置于第二充电框架123。
62.在一些实施例中,次充电工位120还包括第二充电旋钮1292,第二充电旋钮1292设置于第二电控柜122,第二充电旋钮1292用于触发使得第二充电接口121向电池900充电。次充电工位120还包括第二指示灯1293,第二指示灯1293设置于第二电控柜122,并位于第二充电旋钮1292一侧。次充电工位120还包括第二行走组件127,设置于第二充电框架123底部,用于带动第二充电框架123移动。本实施例中,第二行走组件127包括多个滚轮,在其它一些实施例中,第二行走组件127可以是其它形式,例如是履带行走装置。
63.在上述实施例中,次充电工位120包括第二行走组件127,其设置于第二充电框架123底部,用于带动第二充电框架123移动,从而使得次充电工位120可移动。当次充电工位120数量较多时,由于各次充电工位120可移动,更便于对电池充电站100的多个次充电工位120的物理位置进行灵活配置,提高电池充电站100的使用便利性。
64.如图3至图6,在一些实施例中,主充电工位110还包括工控机118,工控机118设置于第一电控柜112。主充电工位110还包括第一通讯接口1194,第一通讯接口1194设置于第一电控柜112。第一通讯接口1194用于连接电池900的通讯线,第一通讯接口1194与工控机118电连接。次充电工位120还包括第二通讯接口1294,第二通讯接口1294设置于第二电控柜122。第二通讯接口1294用于连接电池900的通讯线,第二通讯接口1294与工控机118电连接。
65.在上述实施例中,主充电工位110包括工控机118和第一通讯接口1194,次充电工位120包括第二通讯接口1294,第一通讯接口1194、第二通讯接口1294都能连接电池900的通讯线,并与工控机118电连接,使得工控机118能够经由第一通讯接口1194、第二通讯接口1294读取正在充电的电池900的电池900信息,例如获取电池900的所属机器人、是否正常充电以及实时电量等,便于对多个机器人的电池900进行充电信息管理。
66.在一些实施例中,主充电工位110还包括第一插头1195和第一插座1196。第一插头1195从第一电控柜112向外延伸,第一插头1195用于与外部供电源800电连接。第一插座1196设置于第一电控柜112。次充电工位120还包括第二插头1295和第二插座1296。第二插座1296设置于第二电控柜122。第二插头1295从第二电控柜122向外延伸,第二插头1295能够与第一插座1196或与另一次充电工位120的第二插座1296电连接。
67.在上述实施例中,主充电工位110包括第一插头1195、第一插座1196,次充电工位120包括第二插头1295、第二插座1296。通过设置第一插头1195,便于整个电池充电站100与外部供电源800连接,获取充电来源。通过设置第一插座1196和第二插座1296,便于多个次充电工位120连接更加灵活的串联结构,提高对各种数量待充电机器人群体的兼容性。
68.本实施例中,第一插头1195、第二插头1295为航空插头,第一插座1196、第二插座1296为航空插座。第一插头1195、第二插头1295例如是5芯航空插头,第一插座1196、第二插座1296例如是5芯航空插座,通过航空插头与航空插座匹配的方式,可以使主回路380v串联供电。主充电工位110和次充电工位120在航空插头处取一相220v电源作为工位充电电源使用,并且航空插头具备ip65防护等级,能够有效防水和异物,可以提高使用安全性。
69.在一些实施例中,主充电工位110包括第一散热风扇1197,第一散热风扇1197设置于第一电控柜112,用于对第一电控柜112内部散热。在一些实施例中,次充电工位120包括
第二散热风扇1297,第一散热风扇1297设置于第二电控柜122,用于对第二电控柜122内部散热。
70.在一些实施例中,主充电工位110、次充电工位120分别还包括通信模块。工控机118可以包括显示器以及管理模块,该显示器用于显示交互界面。管理模块与主充电工位110的通信模块、第一通讯接口1194电连接,与次充电工位120的通信模块、第二通讯接口1294电连接,以及与显示器电连接。管理模块用于充电管理。管理模块能够检测与通信模块的通讯状态,以及能够通过第一通讯接口1194、第二通讯接口1294获得电池的充电信息。可选地,工控机118通过显示器显示充电管理交互界面。在本实施例中,管理模块还与第一感应器114、第二感应器124电连接,管理模块能够通过第一感应器114或第二感应器124获得主充电工位110或次充电工位120是否承载有电池。
71.图7为本实用新型电池充电站一实施例中工控机显示器显示的交互界面示意图。在该交互界面中,右上角区域显示多个功能按钮,在一个示例中,可以显示四个功能按钮,分别对应锁定功能、查询电池记录功能、扫码匹配充电功能、设置功能。
72.该交互界面中,显示多个卡片,每个卡片对应一个充电工位,充电工位包括主充电工位110和次充电工位120。例如本实施例的交互界面中,显示顺序编号的1至15个卡片,对应电池充电站100的15个充电工位。每个卡片中,显示该充电工位正在充电的电池900的所属机器人,还显示以下信息:网络状态、电池检测、工位电源、电池充电。当对应充电工位的通信模块与工控机118的通信模块电连接后,网络状态栏由红色变成绿色。当该充电工位的第一感应器114或第二感应器124检测承载有电池后,相应的电池检测栏为绿色,否则不显示。工位电源可以显示绿色或不显示,显示绿色时,该充电工位对电池充电,不显示时,该充电工位断开充电。当通过第一通讯接口1194或第二通讯接口1294检测到电池数据中的充电标志为1或者充电电流为正时,电池充电栏显示绿色,否则不显示。上述交互界面为一种示例,在其它一些实施例中,交互界面可以通过其它方式显示各种充电管理信息。
73.在一些实施例中哦,机器人充电站100的工控机118记录每款机器人的电池的充电记录,记录的具体内容包括在哪个充电工位充电、所属机器人名称、电池厂家、充电开始时间和结束时间、开始充电时的电池容量、以及结束充电时的充电容量等。当电池满电或者移走电池时,机器人充电站100的工控机118会主动保存充电记录。机器人充电站100的工控机118还可以记录电池发生故障的记录,记录的内容包括故障发生时的充电工位编号、所属机器人名称、电池厂家、故障发生时间、故障内容等。
74.上述实施方式中,工控机包括管理模块,管理模块能够检测与通信模块的通讯状态,以及能够通过第一通讯接口1194、第二通讯接口1294获得电池的充电信息,从而实现对电池充电站的主充电工位110及各次充电工位120的状态监控和管理,还能实现对电连接于主充电工位110或次充电工位120的电池的状态监控和管理。工控机还包括显示器,显示器能够显示交互界面,以将上述状态监控和管理的相关信息进行显示,便于管理和展示电池充电站以及与电池充电站连接的电池的多种信息。
75.以上所述仅为本实用新型的优选实施例,并非因此限制本实用新型的专利范围,凡是在本实用新型构思下,利用本实用新型说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1