一种具有轴向定位结构的工业机器人伺服电机的制作方法
1.本实用新型涉及伺服电机技术领域,特别涉及一种具有轴向定位结构的工业机器人伺服电机。
背景技术:
2.在当代工业中,机器人指能自动执行任务的人造机器装置,用以取代或协助人类工作。理想中的高仿真机器人是高级整合控制论、机械电子、计算机与人工智能、材料学和仿生学的产物,目前科学界正在向此方向研究开发。而伺服电机是工业机器人中最重要的动力系统之一;而现有的伺服电机直接采用轴承内圈和主轴过盈配合使用,容易导致与主轴之间的摩擦力较大,而摩擦力会产生热量,导致温度两者之间的温度升高,便会影响主轴的使用。
技术实现要素:
3.本实用新型的主要目的在于提供一种具有轴向定位结构的工业机器人伺服电机,可以有效解决背景技术中的问题。
4.为实现上述目的,本实用新型采取的技术方案为:
5.一种具有轴向定位结构的工业机器人伺服电机,包括主体,所述主体前侧安装有转动轴,所述转动轴的外侧安装有定向机构,所述定向机构包括设置在转动轴外侧的定位套,所述定位套的内部靠近转动轴的位置开设有连接口,所述定位套的四周内部开设有安装槽,所述安装槽的内部设置有活动件,所述活动件与安装槽的上侧内壁之间固定连接有弹簧,所述活动件的下侧位置固定连接有固定轴,所述固定轴的外侧靠近活动件的内部位置套有圆筒,所述定位套的上侧内部位置开设有润滑槽,所述润滑槽的下侧位置固定连接有棉块,所述润滑槽的上侧开设有注液孔。
6.优选的,四组所述安装槽为环形排列,四组所述安装槽与连接口的内部相通。
7.优选的,所述活动件与安装槽为活动连接,所述圆筒与固定轴为活动连接,所述圆筒与转动轴的表面贴合。
8.优选的,所述棉块的与转动轴的表面贴合,所述注液孔与润滑槽的内部相通。
9.优选的,所述主体的前端固定连接有固定板,所述固定板的内部靠近四周位置分别开设有安装孔。
10.优选的,所述固定板与定位套为固定连接,所述安装孔的数量为四组,四组所述安装孔分别位于固定板的内部靠近拐角处。
11.与现有技术相比,本实用新型具有如下有益效果:
12.1、通过活动连接在四组固定轴外侧的圆筒对转动轴夹持、定向,同时两者接触面积小,配合棉块对转动轴的表面擦拭润滑油,减小摩擦力,便会减少摩擦时的热量产生。
13.2、通过四组安装孔实现对固定连接在固定板后端的主体与设备进行安装的目的。
附图说明
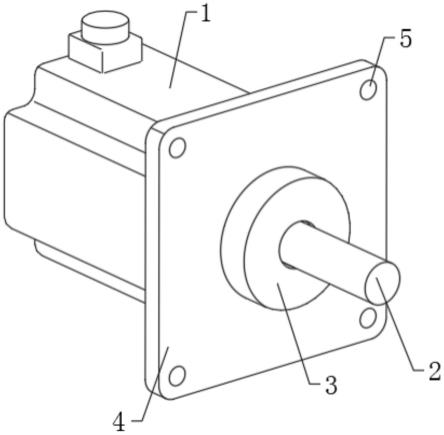
14.图1为本实用新型一种具有轴向定位结构的工业机器人伺服电机的整体结构示意图;
15.图2为本实用新型一种具有轴向定位结构的工业机器人伺服电机的定位机构局部剖切结构示意图;
16.图3为本实用新型一种具有轴向定位结构的工业机器人伺服电机的a部放大结构示意图;
17.图4为本实用新型一种具有轴向定位结构的工业机器人伺服电机的定向机构局部剖切前视结构示意图。
18.图中:1、主体;2、转动轴;3、定向机构;31、定位套;32、连接口;33、安装槽;34、活动件;35、弹簧;36、固定轴;37、圆筒;38、润滑槽;39、棉块;310、注液孔;4、固定板;5、安装孔。
具体实施方式
19.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
20.如图1-4所示,一种具有轴向定位结构的工业机器人伺服电机,包括主体1,主体1前侧安装有转动轴2,转动轴2的外侧安装有定向机构3,定向机构3包括设置在转动轴2外侧的定位套31,定位套31的内部靠近转动轴2的位置开设有连接口32,定位套31的四周内部开设有安装槽33,安装槽33的内部设置有活动件34,活动件34与安装槽33的上侧内壁之间固定连接有弹簧35,活动件34的下侧位置固定连接有固定轴36,固定轴36的外侧靠近活动件34的内部位置套有圆筒37,定位套31的上侧内部位置开设有润滑槽38,润滑槽38的下侧位置固定连接有棉块39,润滑槽38的上侧开设有注液孔310。
21.本实施例中,四组安装槽33为环形排列,四组安装槽33与连接口32的内部相通,活动件34与安装槽33为活动连接,圆筒37与固定轴36为活动连接,圆筒37与转动轴2的表面贴合,棉块39的与转动轴2的表面贴合,注液孔310与润滑槽38的内部相通。
22.具体的,在转动轴2转动前,可通过注液孔310向润滑槽38中注入润滑油,等待润滑油渗透至棉块39中,当转动轴2进行转动时,定位套31的内部设置的四组活动件34,在四组弹簧35弹性推动下,使下侧设置的四组圆筒37分别贴合在转动轴2的外侧夹持,对转动轴2起到定向的目的,而四组圆筒37活动在固定轴36上,使得两者进行转动连接,同时减小与转动轴2接触面积小,可减小两者之间的摩擦力,而转动轴2外侧贴合的棉块39因润滑油的渗透后,将润滑油擦拭在转动轴2的表面,使转动轴2与圆筒37均匀接触,而润滑油在两者之间可进一步减小摩擦力,而摩擦力的减弱,便会减少摩擦时的热量产生。
23.本实施例中,主体1的前端固定连接有固定板4,固定板4的内部靠近四周位置分别开设有安装孔5,固定板4与定位套31为固定连接,安装孔5的数量为四组,四组安装孔5分别位于固定板4的内部靠近拐角处。
24.具体的,通过四组安装孔5实现对固定连接在固定板4后端的主体1与设备进行安装的目的。
25.工作原理:
26.使用时,首先通过四组安装孔5实现对固定连接在固定板4后端的主体1与设备进
行安装的目的,另外在转动轴2转动前,可通过注液孔310向润滑槽38中注入润滑油,等待润滑油渗透至棉块39中,当转动轴2进行转动时,定位套31的内部设置的四组活动件34,在四组弹簧35弹性推动下,使下侧设置的四组圆筒37分别贴合在转动轴2的外侧夹持,对转动轴2起到定向的目的,而四组圆筒37活动在固定轴36上,使得两者进行转动连接,同时减小与转动轴2接触面积小,可减小两者之间的摩擦力,而转动轴2外侧贴合的棉块39因润滑油的渗透后,将润滑油擦拭在转动轴2的表面,使转动轴2与圆筒37均匀接触,而润滑油在两者之间可进一步减小摩擦力,而摩擦力的减弱,便会减少摩擦时的热量产生。
27.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
技术特征:
1.一种具有轴向定位结构的工业机器人伺服电机,包括主体(1),其特征在于:所述主体(1)前侧安装有转动轴(2),所述转动轴(2)的外侧安装有定向机构(3),所述定向机构(3)包括设置在转动轴(2)外侧的定位套(31),所述定位套(31)的内部靠近转动轴(2)的位置开设有连接口(32),所述定位套(31)的四周内部开设有安装槽(33),所述安装槽(33)的内部设置有活动件(34),所述活动件(34)与安装槽(33)的上侧内壁之间固定连接有弹簧(35),所述活动件(34)的下侧位置固定连接有固定轴(36),所述固定轴(36)的外侧靠近活动件(34)的内部位置套有圆筒(37),所述定位套(31)的上侧内部位置开设有润滑槽(38),所述润滑槽(38)的下侧位置固定连接有棉块(39),所述润滑槽(38)的上侧开设有注液孔(310)。2.根据权利要求1所述的一种具有轴向定位结构的工业机器人伺服电机,其特征在于:四组所述安装槽(33)为环形排列,四组所述安装槽(33)与连接口(32)的内部相通。3.根据权利要求1所述的一种具有轴向定位结构的工业机器人伺服电机,其特征在于:所述活动件(34)与安装槽(33)为活动连接,所述圆筒(37)与固定轴(36)为活动连接,所述圆筒(37)与转动轴(2)的表面贴合。4.根据权利要求1所述的一种具有轴向定位结构的工业机器人伺服电机,其特征在于:所述棉块(39)的与转动轴(2)的表面贴合,所述注液孔(310)与润滑槽(38)的内部相通。5.根据权利要求1所述的一种具有轴向定位结构的工业机器人伺服电机,其特征在于:所述主体(1)的前端固定连接有固定板(4),所述固定板(4)的内部靠近四周位置分别开设有安装孔(5)。6.根据权利要求5所述的一种具有轴向定位结构的工业机器人伺服电机,其特征在于:所述固定板(4)与定位套(31)为固定连接,所述安装孔(5)的数量为四组,四组所述安装孔(5)分别位于固定板(4)的内部靠近拐角处。
技术总结
本实用新型公开了一种具有轴向定位结构的工业机器人伺服电机,包括主体,所述主体前侧安装有转动轴,所述转动轴的外侧安装有定向机构,所述定向机构包括设置在转动轴外侧的定位套,所述定位套的内部靠近转动轴的位置开设有连接口,所述定位套的四周内部开设有安装槽,所述安装槽的内部设置有活动件,所述活动件与安装槽的上侧内壁之间固定连接有弹簧,所述活动件的下侧位置固定连接有固定轴。本实用新型所述的一种具有轴向定位结构的工业机器人伺服电机,通过活动连接在四组固定轴外侧的圆筒对转动轴夹持、定向,同时两者接触面积小,配合棉块对转动轴的表面擦拭润滑油,减小摩擦力,便会减少摩擦时的热量产生。便会减少摩擦时的热量产生。便会减少摩擦时的热量产生。
技术研发人员:袁振华
受保护的技术使用者:深圳市卓峰精工技术有限公司
技术研发日:2022.07.11
技术公布日:2022/11/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1