一种电机模块的制作方法
1.本实用新型涉及一种电机模块。
背景技术:
2.舵机主要是由外壳、电路板、电动机、减速器和位置检测元件组成,其工作原理是:舵机的电路板接收到控制信号后,电路板驱动电动机开始转动,电动机通过减速器将动力传至动力输出端,同时由位置检测器检测动力输出端的位置变化状况,并送回信号至电路板,电路板判断动力输出端是否已经到达预定位置(通常判断动力输出端是否已转动预定角度),根据判断结果控制电动机停止转动或者继续转动,最后使动力输出端保持在预定位置,其控制过程为闭环控制。
3.步进电机是一种将电脉冲信号转换成相应角位移或线位移的电动机,每输入一个脉冲信号,转子就转动一个角度或前进一步,其控制过程通常为开环控制。
4.目前益智类玩具中普遍使用的电机模块一般仅具有舵机功能或者仅具有步进电机功能,需分别设计、生产,总体成本较高,而且在组装到益智类玩具上时需仔细区分两种不同的电机,以防出错。
技术实现要素:
5.本实用新型所要解决的技术问题是提供一种电机模块,这种电机模块兼具舵机功能和步进电机功能,可作为舵机或步进电机使用。采用的技术方案如下:
6.一种电机模块,包括壳体、电路板、电动机和动力输出轴,电路板和电动机均安装在壳体中,电动机的输出轴通过传动机构与动力输出轴传动连接,其特征在于:所述电机模块还包括磁铁和磁编码器,磁铁安装在动力输出轴一端部上,动力输出轴另一端部构成电机模块的动力输出端,磁编码器安装在壳体上,磁编码器与磁铁位置相对应;电路板上设有控制电路和电机驱动电路,电机驱动电路的输入端与控制电路相应的输出端电连接,电机驱动电路的输出端与电动机电连接,磁编码器与控制电路相应的输入端电连接。
7.上述控制电路通常具有接收指令的功能模块,可通过有线或者无线连接的方式接收来自上位机(如益智类玩具的主控器)的指令,根据指令需求启动电机驱动电路,驱动电动机运转,在此基础上可根据指令需求确定是否启动磁编码器采集动力输出轴的位置信息。
8.在电机模块作为舵机使用的情况下,启动磁编码器采集动力输出轴的位置信息,具体为:电动机的输出轴旋转时,通过传动机构带动动力输出轴旋转,磁铁随着动力输出轴一起旋转;磁铁旋转时其磁场发生变化,磁编码器(磁传感器)把磁场变化引起的敏感元件磁性能变化转换成电信号,并传输给控制电路;控制电路根据磁编码器传输来的信号,判断动力输出端是否已经到达预定位置(通常判断动力输出轴是否已转动预定角度),动力输出端到达预定位置则控制电动机停止转动,使动力输出端保持在该预定位置。以上控制过程为闭环控制。
9.在电机模块作为步进电机使用的情况下,磁编码器无需启动,此时,控制电路接收到来自上位机的指令后,启动电机驱动电路,驱动电动机运转,电动机的输出轴通过传动机构带动动力输出轴旋转一定角度。控制电路对电动机的控制为开环控制。
10.优选方案中,上述电动机为直流电机。更优选上述电动机为直流有刷电机,采用直流有刷电机,有利于降低电机模块的成本。
11.优选方案中,上述磁铁为圆形磁铁,圆形磁铁的磁极在圆的直径两端,圆形磁铁的轴线与动力输出轴的轴线相重合。
12.优选方案中,上述动力输出轴上固定安装有磁铁安装座,磁铁安装座上设有磁铁定位槽,磁铁固定安装在磁铁定位槽中。
13.更优选方案中,上述磁铁安装座的外周面上设有环形导引槽,壳体上设有至少一个限位块,限位块处在环形导引槽中。通过限位块与环形导引槽的配合,能够使磁铁安装座及磁铁更平稳地随着动力输出轴旋转。一种具体方案中,上述壳体上设有两个限位块,两个限位块均呈半圆形,完成装配后两个半圆形限位块围成环形限位结构。
14.优选方案中,上述传动机构包括齿轮组和齿轮组支架,齿轮组支架与电动机的外壳固定连接(齿轮组支架可与电动机的外壳一体连接),齿轮组的首级齿轮固定安装在电动机的输出轴上,动力输出轴可转动安装在齿轮组支架上,齿轮组的末级齿轮固定安装在动力输出轴上,齿轮组中的其他齿轮安装在齿轮组支架上。采用以上结构,可实现电动机与传动机构、动力输出轴的一体化制造和安装,有助于简化结构,降低制造、装配成本。
15.上述动力输出轴也可以可转动安装在壳体上。
16.优选方案中,上述磁编码器处在磁铁外侧,并且处在动力输出轴的延长线上。
17.优选方案中,上述磁编码器为绝对位置磁编码器。采用绝对位置磁编码器反馈位置信息,可以获得较高的控制精度。
18.优选方案中,上述壳体的外侧壁上设有插柱或插孔,这样,电机模块可作为积木组件,其壳体上的插柱或插孔可与其他积木组件上相应的插孔或插柱插接配合,使电机模块能够与其他积木组件拼接。
19.本实用新型的电机模块中,控制电路接收来自上位机(如益智类玩具的主控器)的指令后,根据指令需求启动电机驱动电路,驱动电动机运转,在此基础上可根据指令需求确定是否启动磁编码器采集动力输出轴的位置信息,从而确定电机模块作为舵机使用还是作为步进电机使用。简而言之,本实用新型的电机模块兼具舵机功能和步进电机功能,可作为舵机或步进电机使用。
附图说明
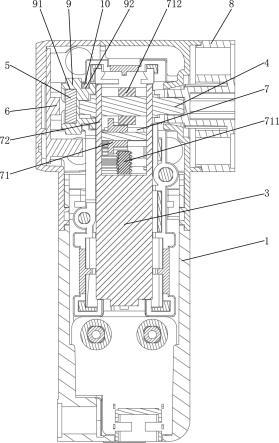
20.图1是本实用新型优选实施例的结构示意图;
21.图2是本实用新型优选实施例的立体分解图;
22.图3是本实用新型优选实施例中闭环控制的电路原理图;
23.图4是本实用新型优选实施例中开环控制的电路原理图。
具体实施方式
24.如图1-图4所示,这种电机模块包括壳体1、电路板2、电动机3、动力输出轴4、磁铁5
和磁编码器6,电路板2和电动机3均安装在壳体1中,电动机3的输出轴通过传动机构7与动力输出轴4传动连接,磁铁5安装在动力输出轴4一端部上,动力输出轴4另一端部构成电机模块的动力输出端(该动力输出端上可安装被驱动件8),磁编码器6安装在壳体1上,磁编码器6与磁铁5位置相对应;电路板2上设有控制电路21和电机驱动电路22,电机驱动电路22的输入端与控制电路21相应的输出端电连接,电机驱动电路22的输出端与电动机3电连接,磁编码器6与控制电路21相应的输入端电连接。
25.本实施例中,电动机3为直流电机(优选直流有刷电机)。
26.本实施例中,磁铁5为圆形磁铁,圆形磁铁5的磁极在圆的直径两端,圆形磁铁5的轴线与动力输出轴4的轴线相重合。动力输出轴4上固定安装有磁铁安装座9,磁铁安装座9上设有磁铁定位槽91,磁铁5固定安装在磁铁定位槽91中。磁铁安装座9的外周面上设有环形导引槽92,壳体1上设有两个限位块10,两个限位块10均呈半圆形,完成装配后两个半圆形限位块10围成环形限位结构,该环形限位结构处在环形导引槽92中。通过限位块10与环形导引槽92的配合,能够使磁铁安装座9及磁铁5更平稳地随着动力输出轴4旋转。
27.本实施例中,传动机构7包括齿轮组71和齿轮组支架72,齿轮组支架72与电动机3的外壳固定连接(齿轮组支架72可与电动机3的外壳一体连接),齿轮组71的首级齿轮711固定安装在电动机3的输出轴上,动力输出轴4可转动安装在齿轮组支架72上,齿轮组71的末级齿轮712固定安装在动力输出轴4上,齿轮组71中的其他齿轮安装在齿轮组支架72上。
28.磁编码器6处在磁铁5外侧,并且处在动力输出轴4的延长线上。
29.本实施例中,磁编码器6为绝对位置磁编码器。
30.壳体1的外侧壁上设有插孔11,这样,电机模块可作为积木组件,其壳体1上的插孔12可与其他积木组件上相应的插柱插接配合,使电机模块能够与其他积木组件拼接。
31.下面简述一下本电机模块的工作原理:
32.控制电路21通常具有接收指令的功能模块,可通过有线或者无线连接的方式接收来自上位机(如益智类玩具的主控器12)的指令,根据指令需求启动电机驱动电路22,驱动电动机3运转,在此基础上可根据指令需求确定是否启动磁编码器6采集动力输出轴4的位置信息。
33.参考图3,在电机模块作为舵机使用的情况下,启动磁编码器6采集动力输出轴4的位置信息,具体为:电动机3的输出轴旋转时,通过传动机构7带动动力输出轴4旋转,磁铁5随着动力输出轴4一起旋转;磁铁5旋转时其磁场发生变化,磁编码器6把磁场变化引起的敏感元件磁性能变化转换成电信号,并传输给控制电路21;控制电路21根据磁编码器6传输来的信号,判断动力输出端是否已经到达预定位置(通常判断动力输出轴4是否已转动预定角度),动力输出端到达预定位置则控制电动机3停止转动,使动力输出端保持在该预定位置。
34.参考图4,在电机模块作为步进电机使用的情况下,磁编码器6无需启动,此时,控制电路21接收到来自上位机(如益智类玩具的主控器12)的指令后,启动电机驱动电路22,驱动电动机3运转,电动机3的输出轴通过传动机构7带动动力输出轴4旋转一定角度。控制电路对电动机的控制为开环控制。
35.其他实施方案中,上述动力输出轴也可以可转动安装在壳体上。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1