充电桩的制作方法
本技术涉及充电,尤其涉及一种充电桩。
背景技术:
1、随着人们对环境的关注,中国各大城市的绿地面积越来越大,草皮品种也趋向丰富,草坪业的迅速发展使人们对草坪割草机的需求也越来越大。割草机是一种用于对草坪、植被进行修剪的自动化机械工具。它能代替或减轻人力,而且操作方便,充分节省人力与时间,实现环境美化,因此被广泛应用。
2、自动割草机在电量不足的情况下,需要返回充电桩进行充电。这就涉及到一个对桩问题,要求机器与充电桩进行准确的配对,即充电接口匹配。机器在自动对桩的情况下,容易出现偏移,导致充电接口未能有效接触,无法正常充电。
3、为此,亟需提供一种充电桩以解决上述问题。
技术实现思路
1、本实用新型的目的在于提供一种充电桩,提高充电机器人的对桩精准度,以保证机器人正常充电。
2、为实现上述目的,提供以下技术方案:
3、充电桩,设置有充电区域,包括:
4、导引结构,包括第一引导结构,所述第一引导结构的两端设置有引导部;
5、充电结构,设置在所述导引结构的上方,所述充电结构包括供电极片,用于机器人充电;且所述引导部之间的间距在沿靠近所述充电结构的方向上逐渐变化。
6、作为充电桩的可选方案,所述第一引导结构两端的所述引导部包括第一引导部和第二引导部,且所述第一引导部和所述第二引导部的外壁面至少一个为斜面。
7、作为充电桩的可选方案,所述第一引导部和所述第二引导部之间的间距在沿靠近所述充电结构的方向上逐渐增大。
8、作为充电桩的可选方案,所述导引结构还包括第二引导结构,所述第二引导结构设置于所述第一引导结构靠近所述充电结构的一端,所述第二引导结构的两端设置有引导部,且所述引导部之间的间距在沿靠近所述充电结构的方向上保持不变。
9、作为充电桩的可选方案,所述第二引导结构两端的所述引导部包括第三引导部和第四引导部,且所述第三引导部和所述第四引导部的外壁面至少一个为斜面。
10、作为充电桩的可选方案,所述斜面与所述导引结构所在的水平面之间的夹角b不小于60度。
11、作为充电桩的可选方案,所述第一引导结构和所述第二引导结构为一体化结构,所述第一引导结构和/或所述第二引导结构的上表面设置有防护阻挡边。
12、作为充电桩的可选方案,所述防护阻挡边靠近所述第一引导结构和/或所述第二引导结构两端的所述引导部设置,所述防护阻挡边的高度沿靠近所述充电结构的方向呈梯形变化。
13、作为充电桩的可选方案,所述充电结构还包括阻挡拐角部,所述阻挡拐角部呈弯折设置,且位于所述充电结构的端部,用于稳固机器人。
14、作为充电桩的可选方案,所述充电结构还包括红外传感器,所述红外传感器设置于所述充电结构朝向所述第一引导结构的一端,用于检测所述机器人与所述供电极片的距离;所述供电极片为可伸缩设置,在所述距离满足预设条件时,所述供电极片相对所述充电结构升起,在所述距离不满足预设条件时,所述供电极片相对所述充电结构降落。
15、与现有技术相比,本实用新型的有益效果:
16、本实用新型所提供的充电桩包括导引结构和充电结构,充电结构的供电极片能够与机器人的充电极片电性连接,导引结构用于引导机器人靠近供电极片,辅助机器人的充电极片与供电极片准确快速对接;在导引结构的第一引导结构的两端设置有引导部,其中引导部之间的间距沿靠近充电结构的方向逐渐变化,当机器人的万向轮与第一引导结构的引导部接触时,万向轮在引导部延伸轨迹的导引下,使得机器人的前进方向出现转动,以使机器逐渐居中摆正位姿,使机器人的充电极片与充电结构的供电极片精准对接,完成充电。
技术特征:
1.充电桩,其特征在于,包括:
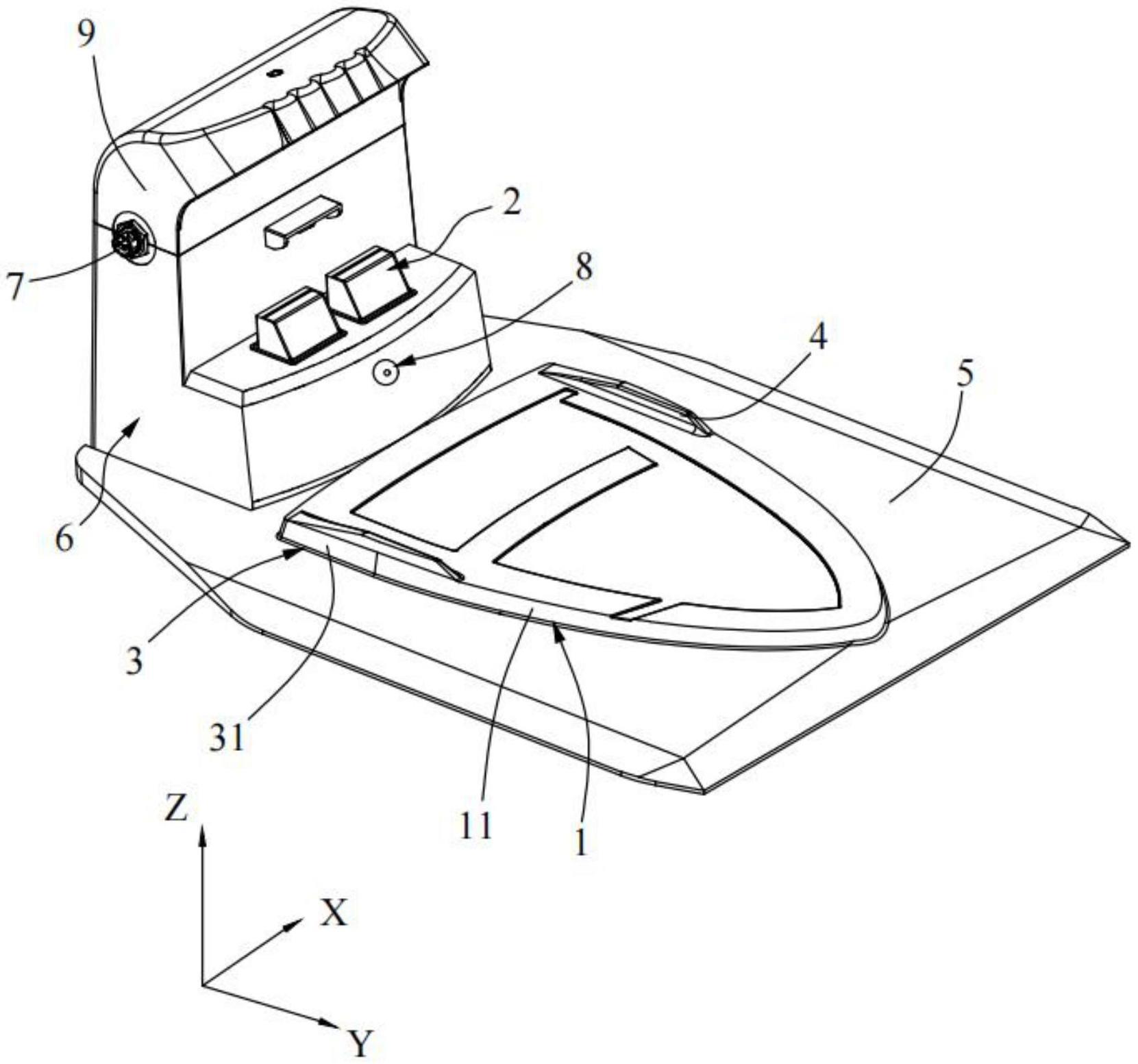
2.根据权利要求1所述的充电桩,其特征在于,所述第一引导结构(1)两端的所述引导部包括第一引导部(11)和第二引导部(12),且所述第一引导部(11)和所述第二引导部(12)的外壁面至少一个为斜面。
3.根据权利要求2所述的充电桩,其特征在于,所述第一引导部(11)和所述第二引导部(12)之间的间距在沿靠近所述充电结构(6)的方向上逐渐增大。
4.根据权利要求2所述的充电桩,其特征在于,所述导引结构(5)还包括第二引导结构(3),所述第二引导结构(3)设置于所述第一引导结构(1)靠近所述充电结构(6)的一端,所述第二引导结构(3)的两端设置有引导部,且所述引导部之间的间距在沿靠近所述充电结构(6)的方向上保持不变。
5.根据权利要求4所述的充电桩,其特征在于,所述第二引导结构(3)两端的所述引导部包括第三引导部(31)和第四引导部(32),且所述第三引导部(31)和所述第四引导部(32)的外壁面至少一个为斜面。
6.根据权利要求2或5所述的充电桩,其特征在于,所述斜面与所述导引结构(5)所在的水平面之间的夹角b不小于60度。
7.根据权利要求4所述的充电桩,其特征在于,所述第一引导结构(1)和所述第二引导结构(3)为一体化结构,所述第一引导结构(1)和/或所述第二引导结构(3)的上表面设置有防护阻挡边(4)。
8.根据权利要求7所述的充电桩,其特征在于,所述防护阻挡边(4)靠近所述第一引导结构(1)和/或所述第二引导结构(3)两端的所述引导部设置,所述防护阻挡边(4)的高度沿靠近所述充电结构(6)的方向呈梯形变化。
9.根据权利要求1所述的充电桩,其特征在于,所述充电结构(6)还包括阻挡拐角部(9),所述阻挡拐角部(9)呈弯折设置,且位于所述充电结构(6)的端部,用于稳固机器人(200)。
10.根据权利要求1所述的充电桩,其特征在于,所述充电结构(6)还包括红外传感器(8),所述红外传感器(8)设置于所述充电结构(6)朝向所述第一引导结构(1)的一端,用于检测所述机器人(200)与所述供电极片(2)的距离;所述供电极片(2)为可伸缩设置,在所述距离满足预设条件时,所述供电极片(2)相对所述充电结构(6)升起,在所述距离不满足预设条件时,所述供电极片(2)相对所述充电结构(6)降落。
技术总结
本技术公开了一种充电桩,属于充电技术领域。本充电桩包括导引结构和充电结构,充电结构的供电极片能够与机器人的充电极片电性连接,导引结构用于引导机器人靠近供电极片,辅助机器人的充电极片与供电极片准确快速对接;在导引结构的第一引导结构的两端设置有引导部,其中引导部之间的间距沿靠近充电结构的方向逐渐变化,当机器人的万向轮与第一引导结构的引导部接触时,万向轮在引导部延伸轨迹的导引下,使得机器人的前进方向出现转动,以使机器逐渐居中摆正位姿,使机器人的充电极片与充电结构的供电极片精准对接,完成充电。
技术研发人员:请求不公布姓名
受保护的技术使用者:丰疆智能科技(福建)有限公司
技术研发日:20221114
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!