一种电机控制电路及挡位控制器的制作方法
本技术属于电子,尤其涉及一种电机控制电路及挡位控制器。
背景技术:
1、挡位控制器是用于控制车辆处于设定挡位的设备。以p挡控制器为例,p挡控制器在接收到挡位信号时,可以根据该挡位信号控制挡位电机进行转动,以使车辆的挡位从其他挡位转至p挡(即锁止p挡),或者使车辆的挡位从p挡转至其他挡位(即解开p挡)。
2、现有技术中,挡位控制器的电机控制电路通常只是简单地通过位于挡位电机中电机转子的位置传感器采集的位置信号来确定挡位电机的转动位置,进而判断挡位电机的控制是否到位,例如判断p挡是否成功解开或者是否成功锁止。然而在实际应用中,p挡是否成功解开或者是否成功锁止,不仅仅需要确定挡位电机是否到达指定位置,还需要确定挡位电机的转动力度是否足以使棘爪进入或者离开棘轮槽,因此,现有技术只针对挡位电机的位置进行检测,考虑不够全面,导致该电机控制电路对挡位电机的控制精准度低下。
技术实现思路
1、有鉴于此,本技术实施例提供了一种电机控制电路及挡位控制器,以解决现有技术存在的电机控制电路对挡位电机的控制精准度低下的技术问题。
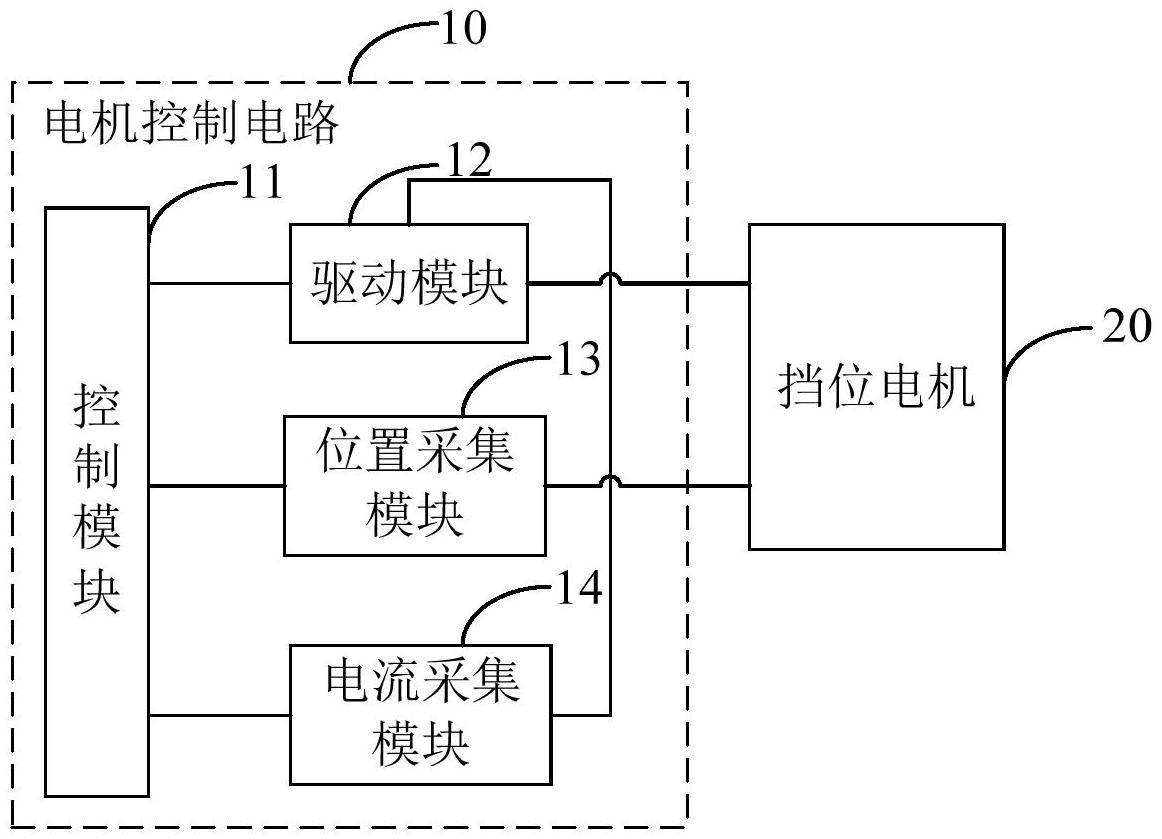
2、本技术实施例提供一种电机控制电路,控制挡位电机转动,所述电机控制电路包括:
3、控制模块,用于在检测到挡位信号时,向驱动模块输出第一控制信号;所述第一控制信号用于指示所述驱动模块控制所述挡位电机转动;
4、所述驱动模块,与所述控制模块和所述挡位电机连接,用于在接收到所述第一控制信号时,控制所述挡位电机转动;
5、位置采集模块,与所述控制模块和所述挡位电机连接,用于采集所述挡位电机的实时位置信号;
6、电流采集模块,与所述控制模块和所述驱动模块连接,用于采集所述驱动模块的实时电流;
7、所述控制模块,还用于在检测到所述实时位置信号不满足预设条件,或所述驱动模块的实时电流不等于阈值电流时,向所述驱动模块输出第二控制信号,以控制所述挡位电机继续转动,直至所述挡位电机的实时位置信号满足所述预设条件,且所述驱动模块的电流等于所述阈值电流为止。
8、可选的,所述位置采集模块包括:
9、位置传感器,设置于所述挡位电机的设定位置,用于采集所述挡位电机的第一位置信号;
10、第一信号处理单元,与所述位置传感器连接,用于对所述第一位置信号进行放大处理,输出所述实时位置信号。
11、可选的,所述设定位置包括第一设定位置和第二设定位置;所述第一位置信号包括第一位置子信号和第二位置子信号;所述位置传感器包括:
12、第一传感器,设置于所述挡位电机的所述第一设定位置,用于采集所述挡位电机的第一位置子信号;
13、第二传感器,设置于所述挡位电机的所述第二设定位置,用于采集所述挡位电机的第二位置子信号。
14、可选的,所述实时位置信号包括第一实时位置子信号和第二实时位置子信号;所述第一信号处理单元包括:
15、信号处理子单元,与所述第一传感器和所述第二传感器连接,用于对所述第一位置子信号进行放大处理,输出第三位置子信号,并对所述第二位置子信号进行放大处理,输出第四位置子信号;
16、第一滤波单元,与所述信号处理子单元连接,用于对所述第三位置子信号进行滤波处理,输出所述第一实时位置子信号;
17、第二滤波单元,与所述信号处理子单元连接,用于对所述第四位置子信号进行滤波处理,输出所述第二实时位置子信号。
18、可选的,所述电流采集模块包括:
19、电流采集单元,与所述驱动模块连接,用于采集所述驱动模块的第一电流;
20、第二信号处理单元,与所述电流采集单元连接,用于对所述第一电流进行放大处理,输出第二电流;
21、第三滤波单元,与所述第二信号处理单元连接,用于对所述第二电流进行滤波处理,输出所述实时电流。
22、可选的,所述信号处理子单元的第一输入端与所述第一传感器连接,所述信号处理子单元的第二输入端与所述第二传感器连接,所述信号处理子单元的第一输出端与所述第一滤波单元的输入端连接,所述信号处理子单元的第二输出端与所述第二滤波单元的输入端连接,所述信号处理子单元包括:信号处理芯片和第一电容;
23、所述信号处理芯片的第一输入端作为所述信号处理子单元的第一输入端,所述信号处理芯片的第二输入端作为所述信号处理子单元的第二输入端,所述信号处理芯片的电源端与所述第一电容的第一端共接于第一直流电源,所述信号处理芯片的接地端接地,所述信号处理芯片的第一输出端作为所述信号处理子单元的第一输出端,所述信号处理芯片的第二输出端作为所述信号处理子单元的第二输出端,所述第一电容的第二端接地。
24、可选的,所述驱动模块的输出端与所述电流采集模块的输入端连接,所述驱动模块为h桥驱动电路,所述h桥驱动电路包括:第一开关管、第二开关管、第三开关管、第四开关管、第一电阻、第二电阻、第三电阻、第四电阻、第五电阻、第六电阻、第七电阻及第八电阻;
25、所述第一电阻的第一端与所述控制模块的第一输出端连接,所述第一电阻的第二端与所述第二电阻的第一端共接于所述第一开关管的控制端,所述第一开关管的第一端和所述第二开关管的第一端共接于第二直流电源,所述第一开关管的第二端、所述第二电阻的第二端及所述第三开关管的第一端共接于所述挡位电机的第一端,所述第三电阻的第一端与所述控制模块的第二输出端连接,所述第三电阻的第二端与所述第四电阻的第一端共接于所述第二开关管的控制端,所述第二开关管的第二端、所述第四电阻的第二端及所述第四开关管的第一端共接于所述挡位电机的第二端,所述第五电阻的第一端与所述控制模块的第三输出端连接,所述第五电阻的第二端与所述第六电阻的第一端共接于所述第三开关管的控制端,所述第七电阻的第一端与所述控制模块的第四输出端连接,所述第七电阻的第二端和所述第八电阻的第一端共接于所述第四开关管的控制端,所述第三开关管的第二端、所述第六电阻的第二端、所述第四开关管的第二端及所述第八电阻的第二端共接于所述电流采集模块的输入端。
26、可选的,所述电流采集单元的输入端为所述电流采集模块的输入端;所述电流采集单元包括第九电阻;
27、所述第九电阻的第一端分别与所述驱动模块的输出端和所述第二信号处理单元的第一输入端连接,所述第九电阻的第二端和所述第二信号处理单元的第二输入端共接于地。
28、可选的,所述第二信号处理单元的第一输入端与所述电流采集单元的输入端连接,所述第二信号处理单元的第二输入端与所述电流采集单元的输出端共接于地;所述第二信号处理单元包括:运算放大器芯片、第十电阻、第十一电阻、第一二极管、第二二极管、第二电容、第三电容及第四电容;
29、所述第十电阻和所述第一二极管的阴极共接并作为所述第二信号处理单元的第一输入端,所述第十电阻的第二端与所述运算放大器芯片的第一输入端连接,所述第二电容的第一端、所述第三电容的第一端、所述第二二极管的阴极及所述第十一电阻的第一端共接并作为所述第二信号处理单元的第二输入端,所述第二电容的第二端和所述第一二极管的阳极共接于地,所述第三电容的第二端和所述第二二极管的阳极共接于地,所述第十一电阻的第二端与所述运算放大器芯片的第二输入端连接,所述运算放大器芯片的输出端作为所述第二信号处理单元的输出端,所述运算放大器芯片的第一复位端、电源端以及第四电容的第一端共接于第三直流电源,所述运算放大器芯片的第二复位端和接地端共接于地,所述第四电容的第二端接地。
30、第二方面,本技术实施例提供一种挡位控制器,包括挡位电机以及上述第一方面或第一方面的任一可选方式中所述的电机控制电路。
31、本技术实施例提供的电机控制电路及挡位控制器具有以下有益效果:
32、本技术实施例提供的电机控制电路,包括控制模块、驱动模块、位置采集模块及电流采集模块,控制模块在检测到挡位信号时,可以向驱动模块输出第一控制信号;第一控制信号用于指示驱动模块控制挡位电机转动;驱动模块可以根据该第一控制信号控制挡位电机转动;此时,位置采集模块可以采集挡位电机的实时位置信号,同时,电流采集模块可以采集驱动模块的实时电流,与现有技术仅确定挡位电机的位置相比,本技术中的控制模块不仅需要检测挡位电机的位置是否满足预设条件,同时还需要确定驱动模块的电流是否等于阈值电流,以提高对挡位电机的控制器准确率,同时,控制模块在检测到挡位电机的实时位置信号不满足预设条件,或驱动模块的实时电流不等于阈值电流时,会继续向驱动模块输出第二控制信号,以控制挡位电机继续转动,直至挡位电机的实时位置信号满足预设条件,且驱动模块的电流等于阈值电流为止,因此,本技术实施例提供的电机控制电路实现了对挡位电机的闭环控制,从而提高了对挡位电机的控制精准度。
- 还没有人留言评论。精彩留言会获得点赞!