一种步进电机手持仪的制作方法
本技术涉及步进电机控制,具体涉及一种步进电机手持仪。
背景技术:
1、目前市场做的步进电机手持仪是采用脉冲信号(pwm)进行控制,电机的初始转动方向需要靠接线来调节,且操控复杂、使用功能单一,自身只能实现简单功能的控制,无法满足复杂功能的使用需求。以机器人为例,其多个关节通过不同的步进电机/舵机进行控制;而脉冲信号通过占空比进行步进电机或舵机的控制,一个接口仅能连接一个步进电机,pwm的控制方式无法满足日益复杂的控制场景。
技术实现思路
1、针对现有技术中存在的上述技术问题,本实用新型提供一种步进电机手持仪,通过总线接口与步进电机进行连接,实现多个步进电机串联,通过多个控制按键控制步进电机的工作,满足日益复杂的控制场景。
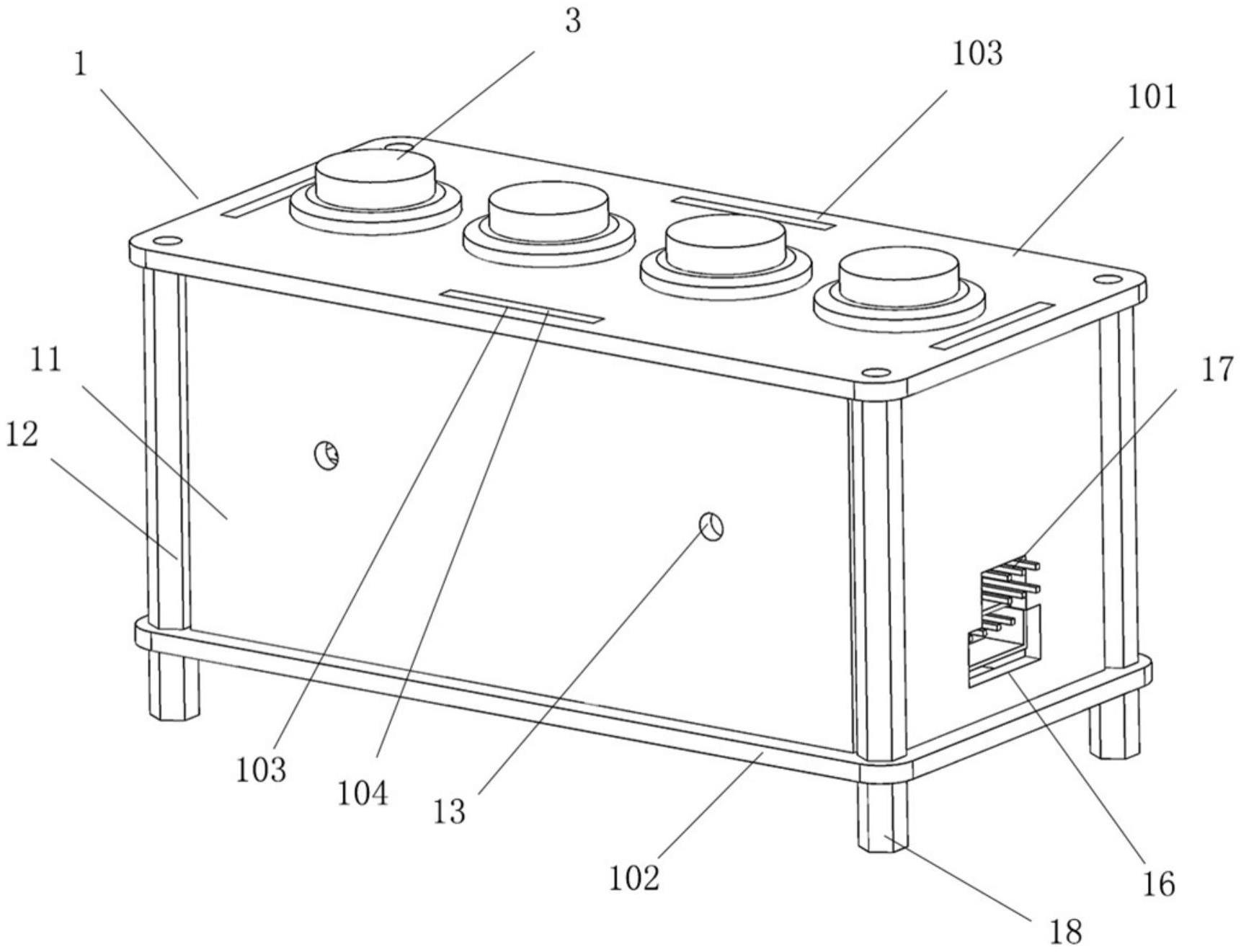
2、本实用新型公开了一种步进电机手持仪,包括壳体,所述壳体的侧板上设置有传感器接口和步进电机的总线接口,所述壳体上侧设置有多个控制按键。
3、优选的,所述壳体包括顶板、底板和连接柱,
4、所述顶板和底板安装在所述连接柱两端,
5、所述顶板和底板上分别设置有插槽,侧板上下两侧分别设置有安装突台,
6、所述侧板通过安装突台和插槽安装在顶板和底板之间。
7、优选的,所述侧板上设置有散热孔,多个控制按键间隔设置在所述顶板上;
8、所述连接柱的下端设置有支撑脚;
9、所述连接柱为铜柱。
10、优选的,所述壳体内设置有控制板和总线舵机转接板,
11、所述控制板与所述总线舵机转接板通过总线连接;
12、所述总线舵机转接板上设置有usb连接端和电源连接端,所述usb连接端向侧板的usb连接口延伸;
13、所述电源连接端与侧板上的电源连接口电连接。
14、优选的,所述控制板上侧安装有信号转接板,所述信号转接板与控制板电连接,所述信号转接板上设置有传感器接口。
15、优选的,所述控制板上设置有微控制器,
16、所述微控制器与信号转接板、总线接口和总线舵机转接板电连接。
17、优选的,所述控制板上设置有接插口,所述控制按键与所述接插口电连接;
18、所述信号转接板上设置有暴露所述接插口的缺口。
19、优选的,微控制器的型号为stm32。
20、与现有技术相比,本实用新型的有益效果为:总线接口用于与步进电机连接,方便步进电机的连接,并可以与多个步进电机连接;传感器接口用于接收传感器反馈的信号,实现闭环控制;控制按键用于发出预设的控制指令,实现步进电机的控制。
技术特征:
1.一种步进电机手持仪,其特征在于,包括壳体,所述壳体包括顶板、底板、侧板和连接柱,
2.根据权利要求1所述的步进电机手持仪,其特征在于,所述侧板上设置有散热孔,多个控制按键间隔设置在所述顶板上;
3.根据权利要求1所述的步进电机手持仪,其特征在于,所述壳体内设置有控制板和总线舵机转接板,
4.根据权利要求3所述的步进电机手持仪,其特征在于,所述控制板上侧安装有信号转接板,所述信号转接板与控制板电连接,所述信号转接板上设置有传感器接口。
5.根据权利要求4所述的步进电机手持仪,其特征在于,所述控制板上设置有微控制器,
6.根据权利要求5所述的步进电机手持仪,其特征在于,所述控制板上设置有接插口,所述控制按键与所述接插口电连接;
7.根据权利要求5所述的步进电机手持仪,其特征在于,微控制器的型号为stm32。
技术总结
本技术公开了一种步进电机手持仪,包括壳体,所述壳体包括顶板、底板、侧板和连接柱,所述壳体的侧板上设置有传感器接口和步进电机的总线接口,所述壳体的上侧设置有多个控制按键;所述顶板和底板安装在所述连接柱两端,所述顶板和底板上分别设置有插槽,侧板上下两侧分别设置有安装突台,所述侧板通过安装突台和插槽安装在顶板和底板之间。总线接口用于与步进电机连接,方便步进电机的连接,并可以与多个步进电机连接;传感器接口用于接收传感器反馈的信号,实现闭环控制;控制按键用于发出预设的控制指令,实现步进电机的控制。
技术研发人员:陶昌宝
受保护的技术使用者:杭州众灵科技有限公司
技术研发日:20221220
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!