一种具有清理输变电线路障碍物功能的智能巡检机器人的制作方法
本技术涉及电力输变电监控的,具体涉及一种具有清理输变电线路障碍物功能的智能巡检机器人。
背景技术:
1、随着我国超高压、特高压输电线路的不断建立,输电网络正朝着全面覆盖的方向发展,输电网络的广阔覆盖导致线路运行环境恶劣,难以保证供 电的稳定性和安全性,一旦发生线路故障将给人们的正常生产和生活带来巨大损失。
2、检索到专利号为cn201921927385.0,专利名称为一种输变电线路智能监测机器人的公开材料,通过分析该公开材料可知,可以实现输变电线路的智能监测,但是由于线路上的障碍物的形式有多种,且位置和状态均不是固定的,需要调整剪刀姿势,但仅仅依靠公开材料中的结构,不能对线路上的障碍物进行清理。
技术实现思路
1、有鉴于此,本实用新型提供一种具有清理输变电线路障碍物功能的智能巡检机器人,不仅能做到输变电线路的巡检,而且对线路上的障碍物可以做到多种角度变化进行清理的效果。
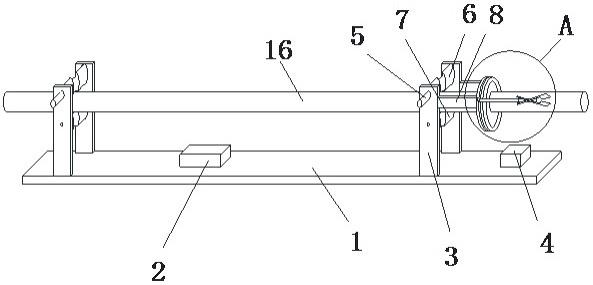
2、为了解决上述技术问题,本实用新型提供一种具有清理输变电线路障碍物功能的智能巡检机器人,包括线路和支撑作用的基座,所述基座上固定设置有用于提供电量和控制功能的控制盒,所述基座的前方设置有用于监测线路的摄像头,所述摄像头与控制盒之间线连接,所述基座的上端设置有支架,所述支架上设置有用于夹持线路并在线路上行走的行走装置,所述行走装置上设置有用于清理线路上障碍物的清理装置。
3、进一步的,所述行走装置包括通过轴承安装在支架上的主动轴和从动轴,所述主动轴和从动轴之间夹持着线路,所述主动轴的端部连接有固定在支架上的行走电机,所述行走电机的输出端主动轴之间固定连接,并带动主动轴转动。
4、进一步的,所述主动轴和从动轴上设置有用于夹持线路的凹槽。
5、进一步的,所述清理装置包括与支架的侧面固定连接有支撑板,所述支撑板的端部连接有支撑架,所述支撑架为环形结构,所述支撑架的外侧面上设置有向内凹结构的齿轮轨道,所述齿轮轨道的内侧面上设置有齿轮条,所述齿轮轨道内放置有带有齿轮的转动电机,所述转动电机的输出端上设置有与齿轮轨道啮合的齿轮,所述转动电机的端部通过凹槽连接齿轮轨道的另一侧面,当转动电机的输出端转动后,能沿着齿轮轨道行走。
6、进一步的,所述转动电机的外侧固定连接固定杆,所述固定杆的内侧面固定设置有板,所述板的另一端连接有设置在支撑架外侧面的防偏轨道,并插入到防偏轨道的内部。
7、进一步的,所述固定杆的外侧面上固定设置有定剪刀,所述定剪刀铰接有动剪刀,所述定剪刀和动剪刀的一侧设置有气缸,所述气缸的一端铰接着定剪刀,另一端铰接着动剪刀,所述气缸电连接着控制盒,并接收控制盒发出的指令。
8、进一步的,所述摄像头设置在定剪刀的下方,方向朝向线路。
9、本实用新型的上述技术方案的有益效果如下:
10、1、基座为板状结构,在基座上固定有与基座垂直的四个支架,两个支架为一组,在基座上还固定设置有控制盒,控制盒的内部设置有电源,在控制盒的内部还设置有plc控制程序的控制板,在基座的前方位置设置有摄像头,用于检查线路,支架为板状结构,在支架上设置有行走装置,方便机器人在线路上行走,行走装置上设置有清理装置,用于清理线路上的障碍物。
11、2、行走装置包括安装在支架上的主动轴和从动轴,主动轴和从动轴之间为线路,且夹持着线路,主动轴的端部连接有行走电机,行走电机固定在支架上,行走电机的输出端连接主动轴,用于电动主动轴转动,行走电机与控制盒之间电连接,用于提供行走电机的动力。
12、 3、清理装置包括与支架连接的支撑板,支撑板与线路平行设置,数量为两个,在支撑板的端部设置有支撑架,支撑架为环形结构,在支撑架的外侧面上设置有齿轮轨道和防偏轨道,齿轮轨道的内侧面的一侧设置有齿条,在另一侧设置有凸起条,凸起条与凹槽连接,防止转动电机出来,转动电机的端部设置有齿轮,齿轮与齿条啮合,在转动电机的作用下,沿着齿轮轨道行走。
技术特征:
1.一种具有清理输变电线路(16)障碍物功能的智能巡检机器人,包括线路(16)和支撑作用的基座(1),其特征在于:所述基座(1)上固定设置有用于提供电量和控制功能的控制盒(2),所述基座(1)的前方设置有用于监测线路(16)的摄像头(4),所述摄像头(4)与控制盒(2)之间线连接,所述基座(1)的上端设置有支架(3),所述支架(3)上设置有用于夹持线路(16)并在线路(16)上行走的行走装置,所述行走装置上设置有用于清理线路(16)上障碍物的清理装置。
2.根据权利要求1所述的一种具有清理输变电线路(16)障碍物功能的智能巡检机器人,其特征在于:所述行走装置包括通过轴承安装在支架(3)上的主动轴(6)和从动轴(7),所述主动轴(6)和从动轴(7)之间夹持着线路(16),所述主动轴(6)的端部连接有固定在支架(3)上的行走电机(5),所述行走电机(5)的输出端主动轴(6)之间固定连接,并带动主动轴(6)转动。
3.根据权利要求2所述的一种具有清理输变电线路(16)障碍物功能的智能巡检机器人,其特征在于:所述主动轴(6)和从动轴(7)上设置有用于夹持线路(16)的凹槽。
4.根据权利要求3所述的一种具有清理输变电线路(16)障碍物功能的智能巡检机器人,其特征在于:所述清理装置包括与支架(3)的侧面固定连接有支撑板(8),所述支撑板(8)的端部连接有支撑架(9),所述支撑架(9)为环形结构,所述支撑架(9)的外侧面上设置有向内凹结构的齿轮轨道(10),所述齿轮轨道(10)的内侧面上设置有齿轮条,所述齿轮轨道(10)内放置有带有齿轮的转动电机(11),所述转动电机(11)的输出端上设置有与齿轮轨道(10)啮合的齿轮,所述转动电机(11)的端部通过凹槽连接齿轮轨道(10)的另一侧面,当转动电机(11)的输出端转动后,能沿着齿轮轨道(10)行走。
5.根据权利要求4所述的一种具有清理输变电线路(16)障碍物功能的智能巡检机器人,其特征在于:所述转动电机(11)的外侧固定连接固定杆(12),所述固定杆(12)的内侧面固定设置有板,所述板的另一端连接有设置在支撑架(9)外侧面的防偏轨道(17),并插入到防偏轨道(17)的内部。
6.根据权利要求5所述的一种具有清理输变电线路(16)障碍物功能的智能巡检机器人,其特征在于:所述固定杆(12)的外侧面上固定设置有定剪刀(13),所述定剪刀(13)铰接有动剪刀(14),所述定剪刀(13)和动剪刀(14)的一侧设置有气缸(15),所述气缸(15)的一端铰接着定剪刀(13),另一端铰接着动剪刀(14),所述气缸(15)电连接着控制盒(2),并接收控制盒(2)发出的指令。
7.根据权利要求6所述的一种具有清理输变电线路(16)障碍物功能的智能巡检机器人,其特征在于:所述摄像头(4)设置在定剪刀(13)的下方,方向朝向线路(16)。
技术总结
本技术提供一种具有清理输变电线路障碍物功能的智能巡检机器人,包括线路和支撑作用的基座,所述基座上固定设置有用于提供电量和控制功能的控制盒,所述基座的前方设置有用于监测线路的摄像头,所述摄像头与控制盒之间线连接,所述基座的上端设置有支架,所述支架上设置有用于夹持线路并在线路上行走的行走装置,所述行走装置上设置有用于清理线路上障碍物的清理装置,所述行走装置包括通过轴承安装在支架上的主动轴和从动轴,所述主动轴和从动轴之间夹持着线路,优点为不仅能做到输变电线路的巡检,而且对线路上的障碍物可以做到多种角度变化进行清理的效果。
技术研发人员:徐志宗,郝林杰,王跃
受保护的技术使用者:鹤壁煤业(集团)有限责任公司
技术研发日:20221230
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!