同步马达控制装置的制作方法
本发明涉及一种同步马达控制装置。
背景技术:
1、在同步马达中,使用dq坐标控制系统来根据转子的磁极位置在适当的相位线圈中流通电流,从而使得产生期望的转矩。在这样的同步马达中,为了对转子进行适当的控制,需要检测磁极初始位置。作为在同步马达中检测磁极初始位置的方法,已知利用直流励磁的磁极初始位置检测法。在利用直流励磁的磁极初始位置检测法中,在同步马达中持续流通电流相位固定了的恒定的励磁电流,并在转子最终停止之后,根据该电流相位来将磁极位置初始化。
2、同步马达包括具有用于检测转子的磁极位置的位置检测传感器的同步马达、以及不具有位置检测传感器的同步马达。专利文献1记载了一种磁极初始位置检测装置,在具备用于检测转子位置的位置检测传感器的同步马达中,在同步马达中持续流通着通过直流励磁而产生的恒定的励磁电流时,该磁极初始位置检测装置根据位置检测传感器的输出来检测转子的加速度的极性发生了变化的时间点,由此检测产生于转子的转矩变为了零的时间点,并基于该时间点的转子实际位置来获取磁极初始位置(例如参照段落[0047])。
3、专利文献2记载了:“一种无刷马达的初始磁极位置估计方法,设为以如下流程进行处理:在θγ、θs生成电路内观测给出来自γ轴电流发生电路的γ轴电流指令作为阶梯状的交变电流指令时的、沿δ轴方向产生的干扰电流,并存储该干扰电流,根据这样存储的干扰电流的大小关系来预先决定磁极位置估计开始相位θs”(摘要)。
4、在专利文献3中,作为进行无传感器控制的同步电动机控制装置,记载了如下装置:“具备:反馈电流检测部,其将根据相选择信号s选择出的在pm马达1中流通的某一个相的电流检测为反馈电流ir;相电压指令运算部,其基于相电流指令值i*和反馈电流ifb来运算相电压指令值v*;三相电压指令运算部,其运算以根据相选择信号s选择出的相为相电压指令值v*的三相电压指令值;以及初始相位选择部,其输出根据所述相选择信号设定的初始相位θ0”(摘要)。
5、现有技术文献
6、专利文献
7、专利文献1:日本特开2020-065433号公报
8、专利文献2:日本特开2006-014423号公报
9、专利文献3:日本特开2017-221001号公报
技术实现思路
1、发明要解决的问题
2、在能够使用位置检测传感器的马达控制装置的情况下,能够如专利文献1中记载的那样采用如下结构:在流通着通过直流励磁而产生的恒定的励磁电流时,根据位置检测传感器的信号来计算转子速度、加速度等,从而检测转矩相当于零的时间点,由此能够在短时间内检测磁极初始位置。然而,在无法利用位置检测传感器的信号的无传感器控制的情况下,无法像使用位置检测传感器的信号的情况那样直接检测转矩为零(加速度为零、或速度极值)。期望一种即使是进行不具有磁极位置传感器的无传感器控制的马达控制装置也能够在短时间内检测磁极初始位置的马达控制装置。
3、用于解决问题的方案
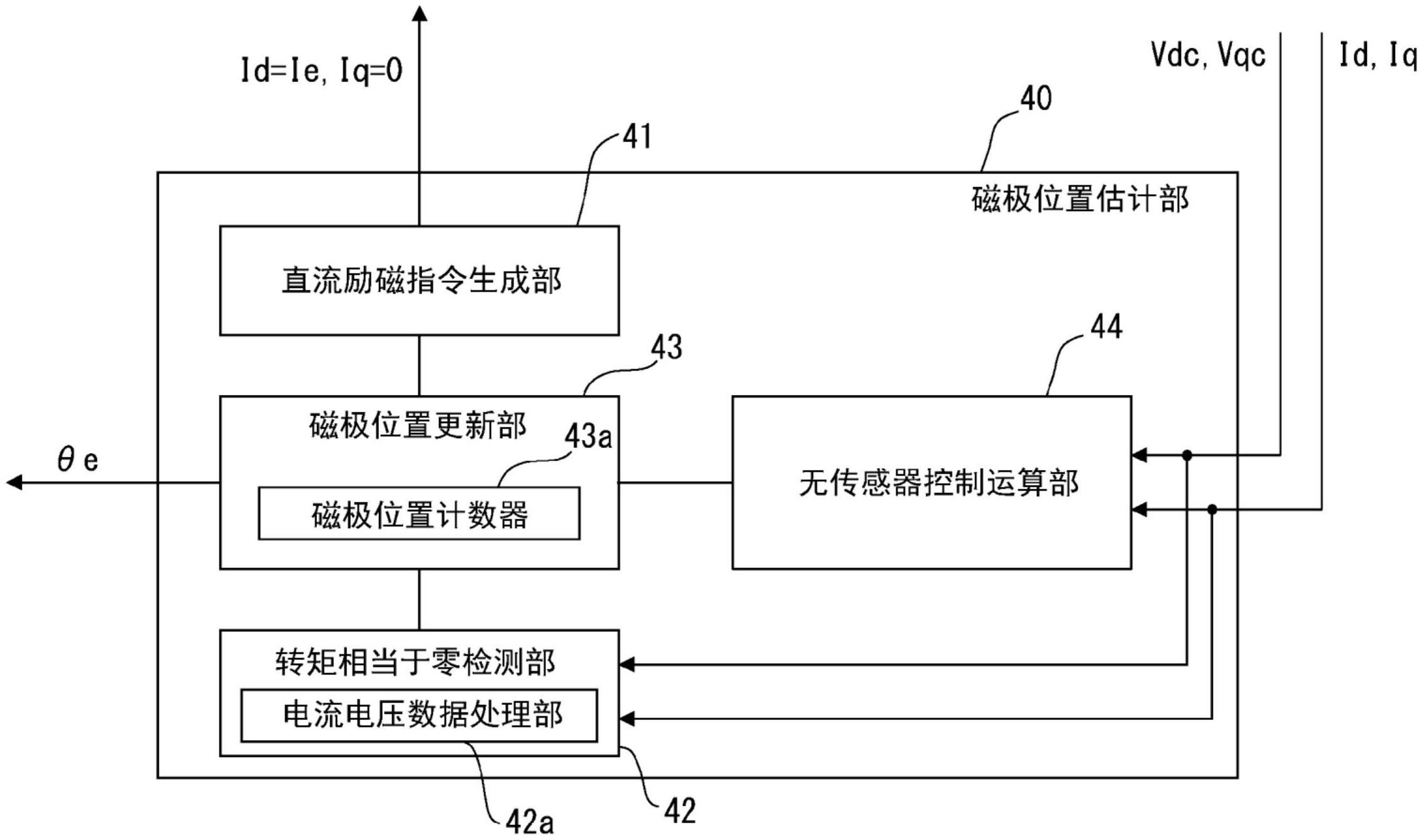
4、本公开的一个方式是用于通过无传感器控制来对同步马达进行驱动控制的同步马达控制装置,具备:直流励磁指令生成部,其生成用于向所述同步马达流通电流相位固定了的恒定的励磁电流的指令;转矩相当于零检测部,当在所述同步马达中流通着基于所述指令的所述励磁电流时,所述转矩相当于零检测部基于与针对所述同步马达的电压或电流控制有关的数据,来检测产生于所述同步马达的转子的转矩变为相当于零的时间点;以及磁极位置更新部,其基于所检测出的所述转矩变为相当于零的时间点的固定的所述电流相位,来将磁极位置初始化。
5、发明的效果
6、根据上述结构,即使在进行马达中不具有位置检测传感器的无传感器控制的马达控制装置中,也能够检测转矩变为相当于零的时间点,能够在短时间内通过直流励磁方式来进行磁极初始值的检测。
7、根据对附图所示出的本发明的典型的实施方式的详细说明,本发明的这些目的、特征及优点、以及其它目的、特征及优点应会变得更加明确。
技术特征:
1.一种同步马达控制装置,用于通过无传感器控制来对同步马达进行驱动控制,所述同步马达控制装置具备:
2.根据权利要求1所述的同步马达控制装置,其中,
3.根据权利要求1所述的同步马达控制装置,其中,
4.根据权利要求1所述的同步马达控制装置,其中,
5.根据权利要求1所述的同步马达控制装置,其中,
6.根据权利要求1至5中的任一项所述的同步马达控制装置,其中,
7.根据权利要求1至6中的任一项所述的同步马达控制装置,其中,
8.根据权利要求1至7中的任一项所述的同步马达控制装置,其中,
技术总结
一种用于通过无传感器控制来对同步马达进行驱动控制的同步马达控制装置(100),具备:直流励磁指令生成部(41),其生成用于向同步马达流通电流相位固定了的恒定的励磁电流的指令;转矩相当于零检测部(42),当在同步马达中流通着基于上述指令的励磁电流时,该转矩相当于零检测部(42)基于与针对同步马达的电压或电流控制有关的数据,来检测产生于同步马达的转子的转矩变为相当于零的时间点;以及磁极位置更新部(43),其基于所检测出的转矩变为相当于零的时间点的固定的电流相位,来将磁极位置初始化。
技术研发人员:高桥谦治,堤智久
受保护的技术使用者:发那科株式会社
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!