一种永磁同步电机的扰动估计方法、控制方法及相关装置与流程
本技术涉及永磁同步电机,尤其涉及一种永磁同步电机的扰动估计方法、控制方法及相关装置。
背景技术:
1、永磁同步电机控制系统中存在的扰动增加了永磁同步电机的控制难度,如何处理和估计永磁同步电机控制系统中存在的扰动成了永磁同步电机的控制关键点。目前,常规的leso(linear extended state observer,线性扩张状态观测器)虽然能够得到扰动变化率较小的扰动估计值,但是其扰动估计效果较差,无法满足永磁同步电机在更高控制要求领域的控制需求。
2、因此,如何提供一种对永磁同步电机控制系统中存在的扰动进行准确估计进而实现永磁同步电机高精度控制的方法,是目前本领域技术人员亟待解决的技术问题。
技术实现思路
1、鉴于上述问题,本技术提供了一种永磁同步电机的扰动估计方法、控制方法及相关装置,以满足永磁同步电机在更高控制要求领域的控制需求。具体方案如下:
2、一种永磁同步电机的扰动估计方法,包括应用于永磁同步电机的电流环控制系统,该方法包括:
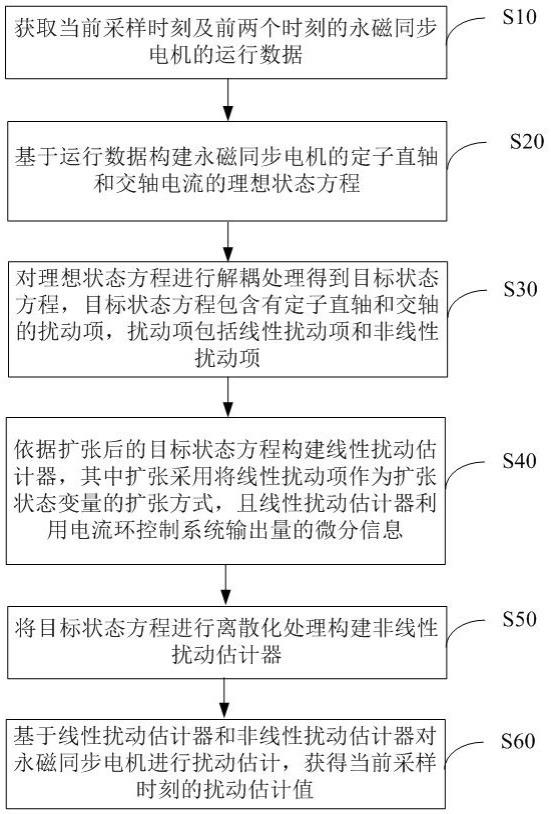
3、获取当前采样时刻及前两个时刻的永磁同步电机的运行数据;运行数据包括定子直轴和交轴前两个时刻的电压、定子直轴和交轴的电流、定子电阻、转子磁链角速度、以及定子直轴和交轴的近似电感;
4、基于运行数据构建永磁同步电机的定子直轴和交轴电流的理想状态方程;
5、对理想状态方程进行解耦处理得到目标状态方程,目标状态方程包含有定子直轴和交轴的扰动项,扰动项包括线性扰动项和非线性扰动项;
6、依据扩张后的目标状态方程构建线性扰动估计器,扩张采用将线性扰动项作为扩张状态变量的扩张方式,其中,线性扰动估计器利用电流环控制系统输出量的微分信息,系统输出量的微分信息包括直轴电流实际值的导数信息和直轴电流估计值的导数信息的差值,以及,交轴电流实际值的导数信息和交轴电流估计值的导数信息的差值;
7、将目标状态方程进行离散化处理构建非线性扰动估计器,非线性扰动估计器的估计过程为考虑相邻两个控制周期的非线性扰动估计值相等的情况或相邻两个控制周期的非线性扰动估计值之间的变化量相等的情况;
8、基于线性扰动估计器和非线性扰动估计器,对永磁同步电机进行扰动估计,获得当前采样时刻的扰动估计值,扰动估计值包括线性扰动估计值和非线性扰动估计值。
9、可选地,基于运行数据构建永磁同步电机的定子直轴和交轴电流的理想状态方程之前,还包括:
10、获取永磁同步电机的定子的直轴和交轴的电压数学计算模型,并记为第一数学计算模型:
11、
12、其中,和分别为定子直轴和交轴的电压值,和分别为定子直轴和交轴的电流值,定子电阻值,上述和分别为定子直轴和交轴磁链,为转子磁链角速度,和分别表示定子直轴和交轴磁链的一阶导数;
13、获取永磁同步电机的定子的直轴磁链和交轴磁链的数学计算模型,并记为第二数学计算模型:
14、
15、其中,为永磁体磁链,为定子的直轴电感,为定子的交轴电感;
16、将第二数学计算模型代入第一数学计算模型并考虑时变电感的影响得到第三数学计算模型:
17、
18、式中,表示的一阶导数,表示的一阶导数。
19、可选地,基于所述运行数据构建所述永磁同步电机的定子直轴和交轴电流的理想状态方程,包括:
20、对第三数学计算模型进行公式变形并考虑系统存在的不易建模的扰动量,得到电流的理想状态方程,
21、电流的理想状态方程为:
22、
23、其中,表示定子直轴的近似电感值,表示定子交轴的近似电感值,表示包含直轴时变电感、将直轴时变电感固定为恒值电感以及交轴耦合项所引起的系统直轴的可建模的扰动量,表示包含交轴时变电感、将交轴时变电感固定为恒值电感以及直轴耦合项所引起的系统交轴的可建模的扰动量,表示直轴其它未建模的扰动量,表示交轴其它未建模的扰动量。
24、可选地,对理想状态方程进行解耦处理得到目标状态方程包括:
25、对所述理想状态方程进行解耦处理得到目标状态方程,目标状态方程为:
26、
27、其中,表示定子直轴的线性扰动项,表示定子交轴的线性扰动项,表示定子直轴的非线性扰动项,表示定子交轴的非线性扰动项,表示定子直轴的总扰动项,表示定子交轴的总扰动项,表示系统存在的总扰动项。
28、可选地,依据扩张后的目标状态方程构建线性扰动估计器包括:
29、扩张后的所述目标状态方程为:
30、
31、其中,;
32、为常数,;
33、线性扰动估计器的数学模型为:
34、式中,,和代表观测增益;
35、其中,表示的一阶导数,表示的一阶导数,表示的一阶导数,在所述直轴线性扰动估计器中,参数,表示直轴电流的实际值,表示直轴电流的估计值,表示直轴电流的估计值的导数;在所述交轴线性扰动估计器中,参数,表示交轴电流的实际值,表示交轴电流的估计值,表示交轴电流的估计值的导数。
36、可选地,将目标状态方程进行离散化处理构建非线性扰动估计器,非线性扰动估计器的估计过程为考虑相邻两个控制周期的非线性扰动估计值相等的情况或相邻两个控制周期的非线性扰动估计值之间的变化量相等的情况,包括:
37、将目标状态方程进行离散化处理,非线性扰动估计器的估计过程为相邻两个控制周期的非线性扰动估计值相等的情况,得到目标状态方程的离散化表示:
38、
39、式中,表示当前控制时刻的直轴的非线性扰动估计值,表示当前控制时刻的前一时刻的直轴的非线性扰动估计值,表示当前控制时刻的交轴的非线性扰动估计值,表示当前控制时刻的前一时刻的交轴的非线性扰动估计值;
40、或者,
41、将目标状态方程进行离散化处理,非线性扰动估计器的估计过程为相邻两个控制周期的非线性扰动估计值之间的变化量相等的情况,得到目标状态方程的离散化表示:
42、,
43、,
44、基于上式可以得到
45、
46、由于相邻两个控制周期的非线性扰动估计值之间的变化量相等,则有
47、
48、
49、式中,表示当前控制时刻的直轴的非线性扰动估计值,表示当前控制时刻的前一时刻的直轴的非线性扰动估计值,表示当前控制时刻的前两时刻的直轴的非线性扰动估计值,表示当前控制时刻的交轴的非线性扰动估计值,表示当前控制时刻的前一时刻的交轴的非线性扰动估计值,表示当前控制时刻的前两时刻的交轴的非线性扰动估计值。
50、一种永磁同步电机的控制方法,包括:
51、获取上述的扰动估计方法估计得到的非线性扰动估计值和线性扰动估计值;
52、运行原始的目标状态方程配置得到的控制器模型;
53、计算与预设的控制目标对应的控制量,控制目标包括:定子直轴电流值以指数跟踪速度收敛至直轴参考电流值,并且定子交轴电流值以指数跟踪速度收敛至交轴参考电流值;
54、定义控制目标为定子直轴和交轴的电流误差跟踪方程:
55、
56、其中,和为定子直轴和交轴的电流,和为定子直轴和交轴的电流参考值,和分别代表直轴和交轴的电流跟踪误差;
57、定义具有指数收敛效果的反馈控制率为:
58、
59、其中,表示的一阶导数,是一个常数,表示的一阶导数,是一个常数;
60、控制量包括:定子直轴的电压值和定子交轴的电压值;
61、将具有指数收敛效果的反馈控制率代入电流误差跟踪方程并结合目标状态方程,可以得到所述控制量的输出矩阵方程为:
62、
63、依据控制量,控制永磁同步电机。
64、一种永磁同步电机的扰动估计装置,包括:
65、参数获取单元,用于获取当前采样时刻及前两个时刻的永磁同步电机的运行数据;运行数据包括定子直轴和交轴前两个时刻的电压、定子直轴和交轴的电流、定子电阻、转子磁链角速度、以及定子直轴和交轴的近似电感;
66、第一方程构建单元,用于基于运行数据构建永磁同步电机的定子直轴和交轴电流的理想状态方程;
67、第二方程构建单元,用于对理想状态方程进行解耦处理得到目标状态方程,目标状态方程包含有定子直轴和交轴的扰动项,扰动项包括线性扰动项和非线性扰动项;
68、线性扰动估计器设计单元,用于依据扩张后的目标状态方程构建线性扰动估计器,扩张采用将线性扰动项作为扩张状态变量的扩张方式,其中,线性扰动估计器利用电流环控制系统输出量的微分信息,系统输出量的微分信息包括直轴电流实际值的导数信息和直轴电流估计值的导数信息的差值,以及,交轴电流实际值的导数信息和交轴电流估计值的导数信息的差值;
69、非线性扰动估计器设计单元,用于将目标状态方程进行离散化处理构建非线性扰动估计器,非线性扰动估计器的估计过程为考虑相邻两个控制周期的非线性扰动估计值相等的情况或相邻两个控制周期的非线性扰动估计值之间的变化量相等的情况;
70、扰动估计单元,用于基于线性扰动估计器和非线性扰动估计器,对永磁同步电机进行扰动估计,获得当前采样时刻的扰动估计值,扰动估计值包括线性扰动估计值和非线性扰动估计值。
71、一种永磁同步电机控制设备,包括至少一个处理器和与处理器连接的存储器,其中:
72、存储器用于存储计算机程序;
73、处理器用于执行计算机程序,以使永磁同步电机控制设备能够实现前述的永磁同步电机的扰动估计方法和永磁同步电机的控制方法。
74、一种计算机存储介质,存储介质承载有一个或多个计算机程序,当一个或多个计算机程序被永磁同步电机控制设备执行时,能够使永磁同步电机控制设备实现前述的永磁同步电机的扰动估计方法和永磁同步电机的控制方法。
75、借由上述技术方案,本技术提供的一种永磁同步电机的扰动估计方法中,通过获取当前采样时刻及前两个时刻的永磁同步电机的运行数据,基于运行数据构建永磁同步电机的定子直轴和交轴电流的理想状态方程,并对理想状态方程进行解耦处理得到目标状态方程,目标状态方程中包含有定子直轴和交轴的线性扰动项和非线性扰动项;依据扩张后的目标状态方程构建线性扰动估计器,其中扩张采用的是将线性扰动项作为扩张状态变量的扩张方式,并且线性扰动估计器中利用了电流环控制系统输出量的微分信息;将目标状态方程进行离散化处理构建非线性扰动估计器;基于线性扰动估计器和非线性扰动估计器,对永磁同步电机的扰动进行估计,并基于扰动估计值设计出了具有指数收敛效果且工况适应性更强的控制量来控制永磁同步电机,从而实现了永磁同步电机的高精度控制。
- 还没有人留言评论。精彩留言会获得点赞!