包括谐振控制器的马达控制器的制作方法
背景技术:
1、可使用许多类型和配置的电动马达,包括例如直流(dc)马达和交流(ac)马达。ac马达也以各种类型可用,包括例如三相马达。三相马达包括例如三对定子绕组。三个正弦电流(针对每对定子绕组有一个正弦电流)由例如dc到ac逆变器生成。三个正弦电流相对于彼此是120度异相的。参考第一正弦电流,第二电流是120度异相的,并且相对于第一正弦电流,第三电流是240度异相的。
技术实现思路
1、在一个示例中,马达控制器集成电路(ic)包括存储设备,该存储设备包含软件。该ic还包括耦接到该存储设备的处理器核。该处理器核具有适于耦接到马达的输出。该处理器核被配置为执行该软件以便以作为马达的速度的谐波的频率实施谐振控制器。
2、在另一个示例中,马达控制器集成电路(ic)包括三相逆变器,该三相逆变器可操作以耦接到马达。该ic包括耦接到该三相逆变器的电路系统。该电路系统被配置为将来自马达的感测电流信号转换为旋转参考系中的信号,对该旋转参考系中的该信号实施谐振控制器,以及使用来自该谐振控制器的输出来生成用于控制该马达的输出信号。
3、在又另一个示例中,一种用于控制马达的方法包括将来自该马达的感测电流信号转换为旋转参考系中的旋转信号,以及由谐振控制器以该马达的该速度的谐波衰减该旋转信号的一部分。该方法还包括使用来自该谐振控制器的输出来生成用于控制该马达的输出信号。
技术特征:
1.一种马达控制器集成电路即马达控制器ic,包括:
2.根据权利要求1所述的马达控制器ic,其中所述马达的所述速度的所述六次谐波是旋转参考系中的所述六次谐波。
3.根据权利要求1所述的马达控制器ic,其中所述处理器核被配置为将马达感测电流从时域转换到旋转参考系中,并且在所述旋转参考系中实施所述谐振控制器。
4.根据权利要求3所述的马达控制器ic,其中所述处理器核被配置为实施clarke变换和park变换以将所述马达感测电流从所述时域转换到所述旋转参考系中。
5.根据权利要求1所述的马达控制器ic,其中所述谐振控制器是第一谐振控制器,并且所述处理器核被配置为以作为所述马达的所述速度的所述谐波的相同频率实施第二谐振控制器。
6.根据权利要求5所述的马达控制器ic,其中所述处理器核对表示所述旋转参考系中的扭矩分量的第一信号实施所述第一谐振控制器,并且对表示所述旋转参考系中的通量分量的第二信号实施所述第二谐振控制器。
7.根据权利要求1所述的马达控制器ic,其中所述处理器被配置为计算作为所述马达的所述速度的所述谐波的所述频率并且向所述谐振控制器提供所述频率。
8.一种马达控制器集成电路即马达控制器ic,包括:
9.根据权利要求8所述的马达控制器ic,其中所述电路系统被配置为实施谐振控制器以便以作为所述马达的所述速度的所述谐波的所述频率衰减所述信号。
10.根据权利要求9所述的马达控制器ic,其中所述谐波是所述马达的所述速度的六次谐波。
11.根据权利要求8所述的马达控制器ic,其中所述电路系统被配置为实施clarke变换和park变换以将所述马达感测电流转换到所述旋转参考系中。
12.根据权利要求9所述的马达控制器ic,其中所述谐振控制器是第一谐振控制器,并且所述电路系统被进一步配置为在所述旋转参考系中实施第二谐振控制器。
13.根据权利要求12所述的马达控制器,其中所述电路系统被配置为确定所述马达的所述速度的谐波并且以所确定的谐波实施所述第一谐振控制器和所述第二谐振控制器。
14.根据权利要求12所述的马达控制器ic,其中所述电路系统被配置为对表示所述旋转参考系中的扭矩分量的第一信号实施所述第一谐振控制器,并且对表示所述旋转参考系中的通量分量的第二信号实施所述第二谐振控制器。
15.一种用于控制马达的方法,所述马达以一速度旋转并且所述方法包括:
16.根据权利要求15所述的方法,其中将所述感测电流信号转换为旋转信号包括应用park变换和clarke变换。
17.根据权利要求15所述的方法,进一步包括确定所述马达的所述速度并且将所述谐波确定为所述马达的所述速度的六次谐波。
18.根据权利要求15所述的方法,其中所述谐振控制器是第一谐振控制器,并且所述方法包括由第二谐振控制器以所述马达的所述速度的所述谐波衰减所述旋转信号的第二部分。
19.根据权利要求18所述的方法,进一步包括将所述谐波确定为所述马达的所述速度的六次谐波。
20.根据权利要求18所述的方法,其中
技术总结
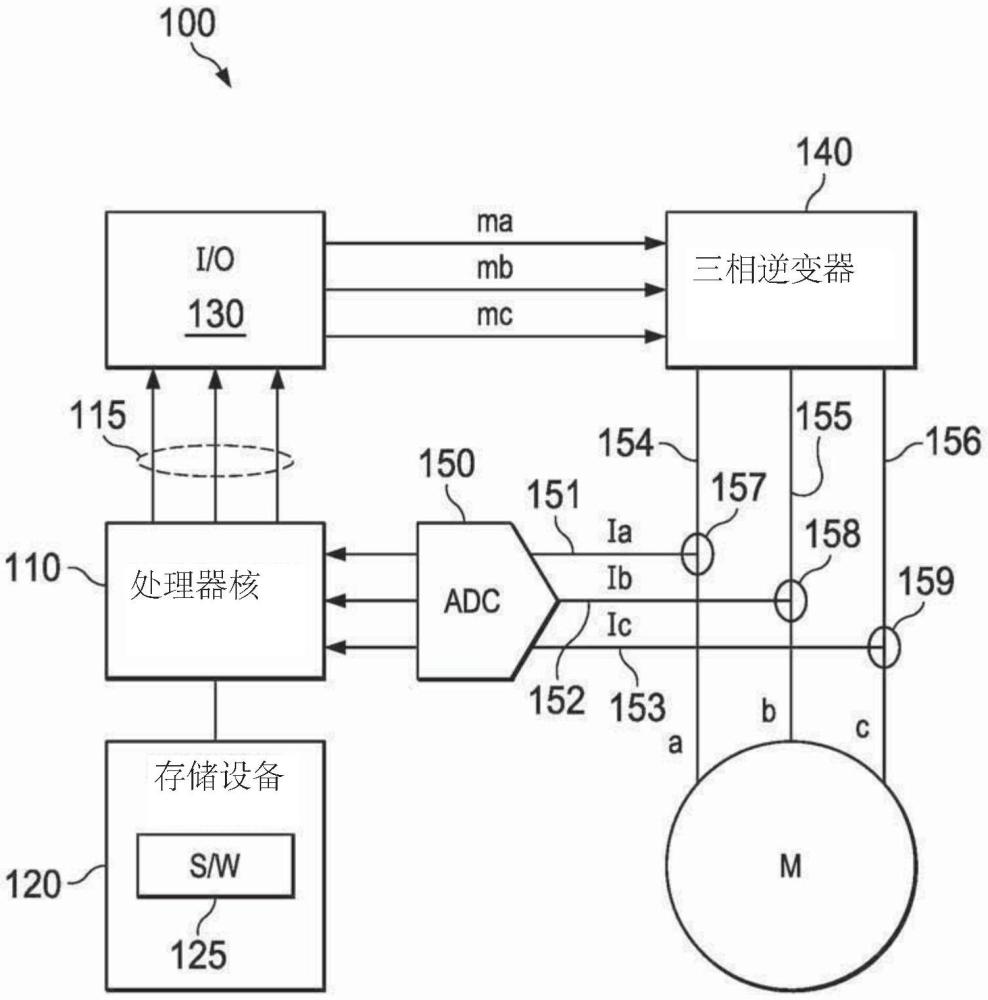
一种马达控制器集成电路(IC)包括存储设备(120),该存储设备包含软件(125)。该IC还包括耦接到该存储设备(120)的处理器核(110)。该处理器核(110)具有适于耦接到马达(M)的输出。该处理器核(110)被配置为执行该软件(125)以便以作为该马达(M)的速度的谐波的频率实施谐振控制器。
技术研发人员:P·库尔卡尼
受保护的技术使用者:德克萨斯仪器股份有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!