用于驱动系统的控制设备、驱动系统、方法与流程
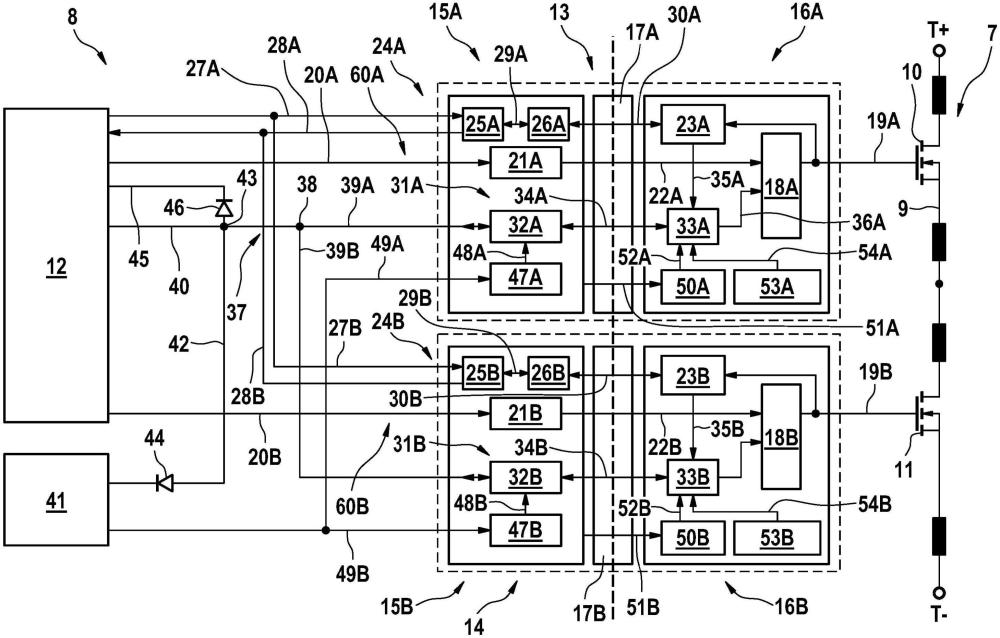
本发明涉及一种用于驱动系统的控制设备,所述驱动系统具有电机,所述电机通过功率电子器件与电蓄能器电连接,其中,所述控制设备具有计算单元和多个门极驱动电路(gate-treiberschaltungen)并且构造用于,在检测到所述驱动系统和/或控制设备的故障情况时在所述功率电子器件中设定安全运行状态。此外,本发明涉及一种具有这样的控制设备的驱动系统。此外,本发明涉及一种用于运行驱动系统的方法。
背景技术:
1、由现有技术已知以下驱动系统,所述驱动系统具有电机,所述电机通过功率电子器件与电蓄能器电连接。这样的电驱动系统尤其在电驱动的机动车辆中越来越重要。为了操控功率电子器件,在这样的驱动系统中通常存在控制设备,该控制设备具有计算单元和多个门极驱动电路。
2、出于安全原因,在检测到所述驱动系统和/或控制设备的故障情况时通常在所述功率电子器件中设定安全运行状态。作为安全运行状态例如已知主动短路或所谓的空转。在主动短路时借助于所述功率电子器件中的开关元件使所述电机的相接头电短路。反之,在空转时将所述功率电子器件的所有开关元件断开或者切换成非导通。
3、公开文献de 10 2011 081 173 a1公开了一种控制设备,该控制设备根据电机的当前的实际转速来设定安全运行状态。主动短路在不依赖于实际转速的情况下原则上是安全的。不过,所述主动短路在低的实际转速的情况下具有以下缺点,即:所述电机在切换成主动短路时产生高的减速力矩。这通常是不期待的。空转在低的实际转速的情况下原则上是有利的,但是在高的实际转速的情况下具有以下缺点,即:可能会将如此高的电压引入到电机的相中,从而产生从所述电机到所述蓄能器中的电流流动。这样的电流流动和由此产生的转矩是不期待的。就此而言,公开文献de 10 2011 081 173 a1建议了,当所述实际转速低于预先给定的阈值转速时设定空转,并且当所述实际转速超过阈值转速时设定主动短路。
技术实现思路
1、按照本发明的控制设备突出之处就权利要求1的特征而言在于,所述计算单元构造用于,根据所述电机的当前的实际转速来确定控制指令并且将所述控制指令存储在门极驱动电路中,并且所述门极驱动电路在检测到故障情况时按照所存储的控制指令来设定安全运行状态。所述电机的当前的实际转速典型地通过所述计算单元来查明。如果所检测到的故障情况与所述计算单元相关,则所述实际转速相应地不再可用并且在决定应该设定何种安全运行状态时会不被考虑。因此,在先前已知的控制设备中,在存在所述计算单元的故障情况时始终将所述主动短路设定作为安全运行状态。但是,如前面所提到的那样,所述空转至少在电机的低的实际转速的情况下是优选的。通过所述控制设备的按照本发明的设计方案实现的是,即使在存在与所述计算单元相关的故障情况时也能够作出对安全运行状态的有利的选择。按照本发明,所述计算单元构造用于根据当前的实际转速来确定控制指令并且将所确定的控制指令存储在所述门极驱动电路中。如果现在出现与所述计算单元相关的故障情况,则所述门极驱动电路能够在不依赖于计算单元的情况下访问所存储的控制指令并且按照所述控制指令来设定所述安全运行状态。优选所述计算单元构造为微控制器。所述门极驱动电路优选分别构造为asic(专用集成电路)。按照本发明,所述计算单元将控制指令存储在门极驱动电路中。就此而言,所述门极驱动电路分别具有用于存储控制指令的数据存储器。所述功率电子器件优选具有与电机的相的数量对应的数量的半桥,其中,每个半桥分别具有至少一个高侧开关和至少一个低侧开关。特别优选所述电机具有三个相,从而而后所述功率电子器件包括三个半桥并且就此而言构造为b6桥。优选所述门极驱动电路的数量对应于所述功率电子器件的开关的数量。如果所述功率电子器件例如构造为b6桥,则所述控制设备相应地具有六个门极驱动电路,其中,门极驱动电路中的每个门极驱动电路分别分配给所述功率电子器件的开关中的不同的开关。优选所述计算单元构造用于确定连续地更新的控制指令并且将其存储在门极驱动电路中。如果将所更新的控制指令存储在所述门极驱动电路中,则优选通过所更新的控制指令来取代已经存储在所述门极驱动电路中的控制指令。
2、按照一种优选的实施方式来规定,所述控制指令具有关于下述情况的信息,即:作为安全运行状态在所述功率电子器件中是应该设定主动短路还是应该设定空转。在所述方法的这种实施方式中,所述计算单元因此根据当前的实际转速来确定作为安全运行状态是应该设定所述主动短路还是应该设定所述空转并且据此来确定所述控制指令。例如,所述计算单元在低的实际转速的情况下确定应该设定所述空转。由此产生与对所述空转的设定伴随的优点。
3、按照一种优选的实施方式来规定,所述计算单元构造用于,对所述电机以当前的实际转速为出发点在预先给定的第一时间间隔之内最大能够达到的最大转速进行预测,并且根据所预测的最大转速来确定所述控制指令。优选所述计算单元将所预测的最大转速与预先给定的阈值转速进行比较。如果所述比较表明所述最大转速低于阈值转速,则所述计算单元优选确定作为安全运行状态应该设定所述空转并且相应地确定所述控制指令。但是,如果所述比较表明所述最大转速超过阈值转速,则所述计算单元优选确定作为安全运行状态应该设定所述主动短路并且相应地确定所述控制指令。优选作为第一时间间隔来预先给定50ms至300ms的时间间隔、特别优选100ms至200ms的时间间隔。
4、优选所述计算单元构造用于根据所述电机的最大转矩并且/或者根据具有所述驱动系统的机动车辆的质量来预测最大转速。根据这种参数能够对所述最大转速进行精确的预测。应该在转速范围内设定所述空转,所述转速范围基本上与所述电机的基本转速范围重合。就此而言,作为所述电机的最大转矩优选以基本转速范围内的最大转矩为基础。这种处理方式相当于简化的最坏情况观察。作为对此的替代方案,作为最大转矩优选以所述电机在其当前的工作点中最大能够产生的最大转矩为基础。
5、按照一种优选的实施方式来规定,所述控制指令具有持续时间,所述门极驱动电路在检测到故障情况时开始所述持续时间并且作为安全运行状态在功率电子器件中设定所述空转,并且所述门极驱动电路随着所述持续时间结束以所设定的空转为出发点作为安全运行状态在功率电子器件中设定所述主动短路。按照这种实施方式,所述计算单元因此根据当前的实际转速来查明所述持续时间。而后在检测到功能故障时首先设定所述空转,并且随着所述持续时间结束而设定所述主动短路。这以下述认识为基础,即:所述空转即使在高的实际转速的情况下也至少暂时地或者针对所述包含在控制指令中的持续时间是安全的。优选所述计算单元如此确定所述持续时间,从而在不期望的高电压被引入到所述电机的相中之前以所设定的空转为出发点来设定所述主动短路。优选随着实际转速的升高而降低所述持续时间。
6、按照一种优选的实施方式来规定,所述门极驱动电路分别具有用于存储控制指令的数据存储器,并且所述计算单元通过双向的通信装置在通信技术上与所述数据存储器连接。因为所述计算单元通过双向的通信装置与所述数据存储器连接,所以所述计算单元能够检查,所述控制指令是否被正确地存储在门极驱动电路中或所述门极驱动电路的数据存储器中。优选所述双向的通信装置分别具有数据总线、尤其uart总线。优选所述计算单元构造用于通过具有消息计数器和/或校验和的端到端保护来保护所述控制指令。如果在存储所述控制指令时识别出故障,则所述计算单元优选在预先给定的去抖动时间结束之后发起安全反应、如例如报警信号或者降低电机的功率。
7、优选所述门极驱动电路分别具有用于对计算单元进行监测的安全逻辑单元。如果存在与所述计算单元相关的故障情况,则因此通过所述门极驱动电路本身来检测这种故障情况。
8、按照一种优选的实施方式来规定,所述安全逻辑单元分别通过安全控制路径在通信技术上与相应的门极驱动电路的放大器连接。所述也被称为增压器的放大器是一种单元,该单元构造用于对输入的控制信号进行增强并且向所述功率电子器件的配属的开关加载经增强的控制信号,以便切换所述开关。优选所述安全逻辑单元在通信技术上与相应的门极驱动电路的数据存储器连接,从而所述安全逻辑单元能够访问被存储在数据存储器中的控制指令。
9、按照一种优选的实施方式来规定,所述计算单元分别通过标准控制路径在通信技术上与放大器连接,并且所述安全控制路径具有比所述标准控制路径要高的优先级。所述标准控制路径是以下控制路径,通过所述控制路径所述计算单元在所述电机的无故障的运行中向所述放大器加载经脉宽调制的控制信号。因为所述安全控制路径具有比所述标准控制路径要高的优先级,所以借助放大器以比所述通过标准控制路径所传输的控制信号要高的优先级来变换所述通过安全控制路径所传输的控制信号。
10、优选所述控制设备具有双向的安全通信网络,其中,所述安全通信网络具有节点,不仅所述计算单元而且所述安全逻辑单元都在通信技术上与所述节点连接。所述安全通信网络是双向的。就此而言,所述安全逻辑单元和所述计算单元分别通过至少一个双向的通信路径与所述节点连接。通过这样的安全通信网络,所述安全逻辑单元中的每个安全逻辑单元都能够就故障情况不仅对计算单元而且也对安全逻辑单元中的其它安全逻辑单元进行监测。此外,所述计算单元能够通过安全通信网络向安全逻辑单元提供关于通过计算单元所检测到的故障情况的信息。
11、优选所述门极驱动电路分别具有低压侧和高压侧,其中,所述高压侧分别具有用于对相应的低压侧进行内部监测的单元。由此产生以下优点,即:所述门极驱动电路本身能够检测与其低压侧相关的故障情况。优选所述门极驱动电路的高压侧至少具有安全逻辑单元的部件,所述部件通过安全控制路径在通信技术上与相应的放大器连接。优选所述门极驱动电路的高压侧具有数据存储器。所述高压侧通过高压网络的电能量源来馈电。优选所述能量源是蓄能器,该蓄能器通过功率电子器件与电机电连接。所述低压侧通过低压网络的能量源来馈电。例如,所述能量源是另外的电蓄能器,其额定电压小于所述通过功率电子器件与电机电连接的蓄能器的额定电压。
12、按照本发明的电驱动系统具有电机,该电机通过功率电子器件与电蓄能器电连接。所述驱动系统突出之处就权利要求12的特征而言在于用于对功率电子器件进行操控的按照本发明的控制设备。由此也产生已经提到的优点。另外的优选的特征和特征组合从说明书中以及从权利要求书中产生。
13、按照本发明的方法用于运行电驱动系统,所述电驱动系统具有电机和控制设备,所述电机通过功率电子器件与电蓄能器电连接,所述控制设备用于操控所述功率电子器件,其中,所述控制设备具有计算单元和多个门极驱动电路,按照本发明的方法突出之处就权利要求13的特征而言在于,所述计算单元根据电机的当前的实际转速来确定控制指令并且将所述控制指令存储在门极驱动电路中,就故障情况对所述驱动系统进行监测,并且所述门极驱动电路在检测到故障情况时按照所存储的控制指令来设定安全运行状态。由此也产生已经提到的优点。另外的优选的特征和特征组合从说明书中以及从权利要求书中产生。
14、按照所述方法的一种优选的实施方式来规定,所述控制指令具有关于下述情况的信息,即:作为安全运行状态在所述功率电子器件中是应该设定主动短路还是应该设定空转,所述计算单元对所述电机以当前的实际转速为出发点在预先给定的第一时间间隔之内最大能够达到的最大转速进行预测,并且所述控制指令根据所预测的最大转速来确定在检测到与所述计算单元相关的故障情况时开始比所述第一时间间隔要短的第二时间间隔,并且所述门极驱动电路在第二时间间隔结束之后作为安全运行状态程序化所述主动短路。例如,作为第二时间间隔预先给定20到250ms的时间间隔。所述计算单元对所述电机以当前的实际转速为出发点在第一时间间隔之内最大能够达到的最大转速进行预测并且根据这个最大转速来确定控制指令。但是,在特定的情况下、例如当所述具有驱动系统的机动车辆下坡加速时,所述电机的转速可能进一步升高。在这种情况下不期望的是,维持原来设定的空转。如果所述故障情况不与所述计算单元相关,则所述计算单元能够继续监测实际转速并且必要时设定主动短路。但是,如果所述故障情况与所述计算单元相关,则不产生这种可能性。在这种情况下,为了避免从电机到蓄能器中的电流流动而有利的是,在所述第二时间间隔结束之后作为安全运行状态程序化或者说设定所述主动短路。
- 还没有人留言评论。精彩留言会获得点赞!