一种多电飞机的高均峰比混合能源系统分层控制方法
本发明属于能源系统运行控制领域,特别涉及一种多电飞机的高均峰比混合能源系统分层控制方法。
背景技术:
1、随着飞机电气化程度不断增加,多电飞机采用了更多的电能取代原来的液压能和气压能作为其二次能源系统,因此多电飞机需要大容量的供电系统。为了实现可靠的270v供电,多电飞机通常采用混合能源系统供电。储能装置拥有高能量、高功率密度和快速充放电的特性,搭配机载电力电子设备和发电机等分布式电源构成混合能源系统。为了实现多电飞机混合能源系统的运行控制及优化设计,将飞机的发电、配电和用电集中在一个统一的系统内由控制器统一规划、管理和控制,因此,飞机的供电系统可以被视为机载微电网。混合能源系统能够实现分布式电源高效、快速、灵活的应用,可开发性、延伸性使得系统能够接纳广泛的分布式电源的大规模接入,从而实现对各种类型负荷以及多种能源形式的高可靠性供给,实现了向主动式配电网的有效过渡。
2、近年来,分层控制被国内外学者首先应用在直流微电网中,一般情况下分为系统级优化层、决策级控制层和物理层,系统级优化结合可靠的能量管理控制策略在大时间尺度下保证系统的稳定运行,决策级控制的目标是维持系统功率平衡和直流母线电压稳定,使其达到系统的整体经济性、稳定性、可靠性最优。国内外专家研究开发了不同的能量管理策略,根据控制方法的不同,可分为基于规则、基于优化和基于学习的三种类型,基于优化的能量管理策略更具有实用性,其设有相应的优化目标例如系统效率和燃料经济性等,通过计算得到使优化目标函数最小的控制策略而对混合电源系统进行优化。由于机载混合能源系统具有大量的高功率电力电子负载,负荷冲击性强、响应时间需求高,微电网中的分层控制直接应用到机载混合能源系统中后,控制系统难以响应高幅值、高频率的负荷变化,造成能量耗散大,能量利用率降低。为解决这些问题,本发明提出了一种混合能源系统在高均峰比负荷下的分层控制结构,在充分考虑了控制目标的需求响应时间、负荷优先级的前提下,将系统划分为不同的时间尺度,并匹配相应的控制层级,从而方便实行分层控制。
技术实现思路
1、为了解决将分层控制直接应用于混合能源系统后,控制系统响应不及时所带来的大量的能量耗散问题,本发明将分层控制延伸拓展到机载混合能源系统中,并提出了一种多电飞机混合能源系统在高均峰比负荷下的分层控制方法,保证了系统在高均峰比的动态负荷下,且能够有效处理不确定因素对控制系统的干扰作用,保证系统在分层控制下的整体运行性能。
2、本发明的技术方案是:一种多电飞机的高均峰比混合能源系统分层控制方法,包括以下步骤:
3、步骤1:构建机载混合能源系统的物理层,用于发电机的控制、储能系统的充放电控制,并负责将数据传输至上层并接受上层控制;
4、步骤2:构建下垂控制层,通过自适应电流控制实现一级控制,并通过电压二次补偿控制实现二级控制;
5、步骤3:构建能量管理层,实现对系统的优化分配及管理。
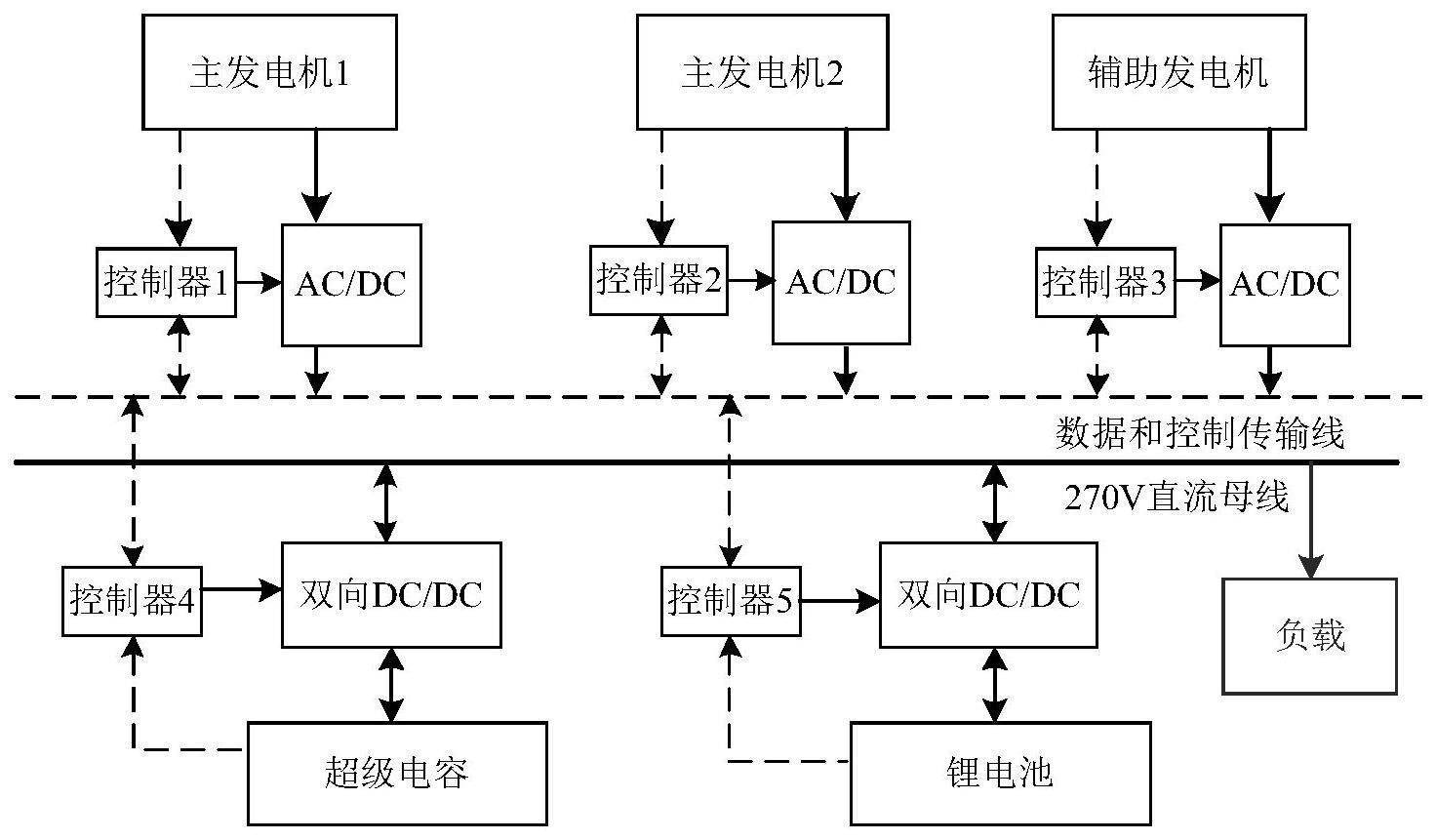
6、进一步的,所述步骤1中,机载混合能源系统物理层包括主发电机(1)、主发电机(2)、辅助发电机、控制器(1)、控制器(2)、控制器(3)、控制器(4)、控制器(5)、三组ac-dc变换器、两组双向dc-dc变换器、锂离子电池、超级电容器和负载,其中控制器(1)、控制器(2)和控制器(3)分别控制ac-dc变换器,控制器(4)和控制器(5)分别控制双向dc-dc变换器;主发电机(1)、主发电机(2)和辅助发电机分别通过三组ac-dc变换器并联至高压直流母线;锂离子电池和超级电容器分别通过两组双向dc-dc变换器并联至高压直流母线;超级电容器和锂离子电池由三级式发电机进行充电;系统所带负载为高均峰比的动态负荷。
7、进一步的,所述步骤1、2和3中,在充分考虑控制目标的实时性和优先级的基础之上,划分不同的时间尺度,在毫秒级的时间尺度内,设置物理层及改进下垂控制层;在秒级的时间尺度内,利用模型预测控制(mpc)算法作为能量管理层的控制算法。
8、进一步的,所述步骤2中,自适应电流控制的数学模型为:
9、
10、其中:voi为变换器ci的实际输出电压;v*ref为母线基准电压,r*di为下垂系数初始值,λi为均流控制的控制变量,计算式为:
11、
12、其中:kpi和kii为电流补偿控制pi调节参数,ioi为变换器ci的输出电流值,σoi为电流失配值;s为复域。
13、
14、其中:为输出电流平均值,ki为电流分配比例。
15、进一步的,所述步骤2中,电压二次补偿控制的数学模型为:
16、
17、其中,voi为变换器ci实际输出电压值;rdi为下垂系数实际值,计算式为:
18、rdi=r*di-λi
19、λv为电压控制的控制变量,其计算式为:
20、
21、其中,v*ref为母线基准电压;vo为实际母线电压;kpv、kiv为输出电压补偿pi调节参数;s为复域。
22、进一步的,所述步骤3中,能量管理层包括以下子步骤:
23、步骤3.1:设置控制、状态、输出变量,建立预测模型;
24、
25、式中,k为当前采样时刻;δu(k)为控制量当前时刻与上一时刻的变化量,x(k+1)为下一时刻的状态变量矩阵,y(k)为当前时刻的输出变量矩阵,a、b、c分别为状态、输入、输出矩阵;
26、δu(k)=u(k)-u(k-1)=[δpmg1(k),δpmg2(k),δpuc(k),δpb(k),δpag(k)]t(10)
27、其中,δu(k)为控制量当前时刻与上一时刻的变化量,δpmg1(k)为主发电机1的功率的变化量,δpmg2(k)为主发电机2的功率的变化量,δpuc(k)为超级电容模块的功率的变化量,δpb(k)为锂电池模块的功率的变化量,δpag(k)为辅助发电机模块的功率的变化量;
28、步骤3.2:设置约束条件,包括系统输出功率约束、充放电功率约束和电荷约束;
29、步骤3.3:设置系统输出功率约束;
30、步骤3.4:设置目标函数,根据目标函数,最终得到系统中每个发电机、锂电池和超级电容的最优功率分配,实现多电飞机混合能源系统能量智能最优分配。
31、进一步的,所述步骤3.2中,系统输出功率约束为:
32、假设系统无损耗,负载功率为两台主发电机(pmg1、pmg2)、辅助发电机(pag)、锂电池(pb)和超级电容(puc)的功率之和,满足:
33、pmg1(k+ti|k)+pmg2(k+ti|k)+puc(k+ti|k)+pb(k+ti|k)+pag(k+ti|k)=pload(11)
34、其中,pmg1(k+ti|k)为发电机1在当前采样时刻k对k+ti时刻功率的预测值,pmg2(k+ti|k)为发电机2在当前采样时刻k对k+ti时刻功率的预测值,puc(k+ti|k)为超级电容在当前采样时刻k对k+ti时刻功率的预测值,pb(k+ti|k)为锂电池在当前采样时刻k对k+ti时刻功率的预测值,pag(k+ti|k)为辅助发电机在当前采样时刻k对k+ti时刻功率的预测值;pload为负载功率。
35、进一步的,所述步骤3.2中,充放电功率约束为:
36、
37、其中,pmg1(k+ti|k)为发电机1在当前采样时刻k对k+ti时刻功率的预测值,pmg2(k+ti|k)为发电机2在当前采样时刻k对k+ti时刻功率的预测值,puc(k+ti|k)为超级电容在当前采样时刻k对k+ti时刻功率的预测值,pb(k+ti|k)为锂电池在当前采样时刻k对k+ti时刻功率的预测值,pag(k+ti|k)为辅助发电机在当前采样时刻k对k+ti时刻功率的预测值;pmg_max为主发电机的最大功率;puc_min、puc_max分别为超级电容的最小、最大功率;pb_min、pb_max分别为锂电池的最小、最大功率;pag_max为辅助发电机功率。
38、进一步的,所述步骤3.2中,电荷约束为:
39、
40、socuc_min、socuc_max为超级电容的最小、最大荷电状态;socb_min、socb_max为锂电池的最小、最大荷电状态;socuc(k+ti|k)为在当前采样时刻k对k+ti时刻荷电状态的预测值,socb(k+ti|k)为发电机2在当前采样时刻k对k+ti时刻荷电状态的预测值
41、进一步的,所述步骤3.4的目标函数为:
42、
43、式中,k=0,1,2…;n为预测步长;q为预测输出误差的正定加权系数矩阵;pmean为系统平均功率,也就是系统的参考轨迹;pmg1(k+ti|k)、pmg2(k+ti|k)为当前采样时刻k对k+ti时刻的两个主发电机功率预测输出值。
44、发明效果
45、本发明的技术效果在于:在充分考虑控制目标的实时性和优先级的基础之上,划分不同的时间尺度,利用分层控制方法使其达到系统的整体经济性、稳定性、可靠性最优化;本发明中分层设置底层为物理层,中间层为改进下垂控制层,顶层为能量管理(ems)层,物理层面向系统的底层设备进行本地控制,改进下垂控制层用于协调物理层的各分布式电源及储能单元等设备完成控制进程,能量管理(ems)层模型预测控制(mpc)实现混合能源系统的功率按照优先级智能分配给物理层各单元,完成系统的全局优化管理决策;本发明保证了系统在高均峰比的动态负荷下,且能够有效处理不确定因素对控制系统的干扰作用,保证系统在分层控制下的整体运行性能。所述系统所带负载为高均峰比的动态负荷,高均峰比的负荷对系统功率分配的快速性、稳定性有更高的要求。所述各层的时间尺度不同,在毫秒级的时间尺度内,设置物理层及改进下垂控制,其对通讯的实时性要求较高;在秒级的时间尺度内,利用模型预测控制(mpc)算法作为能量管理层的控制算法,其对通讯速度要求不高。
- 还没有人留言评论。精彩留言会获得点赞!