电机初始位置角校准方法及装置与流程
本发明涉及永磁电机,特别是涉及一种电机初始位置角校准方法及装置。
背景技术:
1、电机的初始位置角度是电机控制中的重要参数,其准确性对于充分发挥电机性能有重要影响。现有技术中为了保证电机的初始位置角的准确性,需要把被测电机安装到测试台架上,测试台架电机拖动被测电机运行到设定转速,在设定转速处,控制器电流模式运行控制被测电机,并给定直轴电流idref电流为0,和交轴电流iqref电流为0,此时观察输出直轴电压ud是否为零,若ud不为零,则调整初始位置角使ud在零附近,此时设定的初始位置角即为电机的初始为角。
2、现有技术应用测试台架对电机的初始位置角进行校准的过程中,需要预先将电机安装至测试测试台架上,而安装过程繁琐,导致安装耗时较长,若应用在生产过程中影响生产效率。
技术实现思路
1、有鉴于此,本发明提供一种电机初始位置角校准方法,该方法可以直接通过电机自身的运行对初始位置角进行校准,无需测试台架电机拖动。
2、本发明还提供了一种电机初始位置角校准装置,用以保证上述方法在实际中的实现及应用。
3、一种电机初始位置角校准方法,包括:
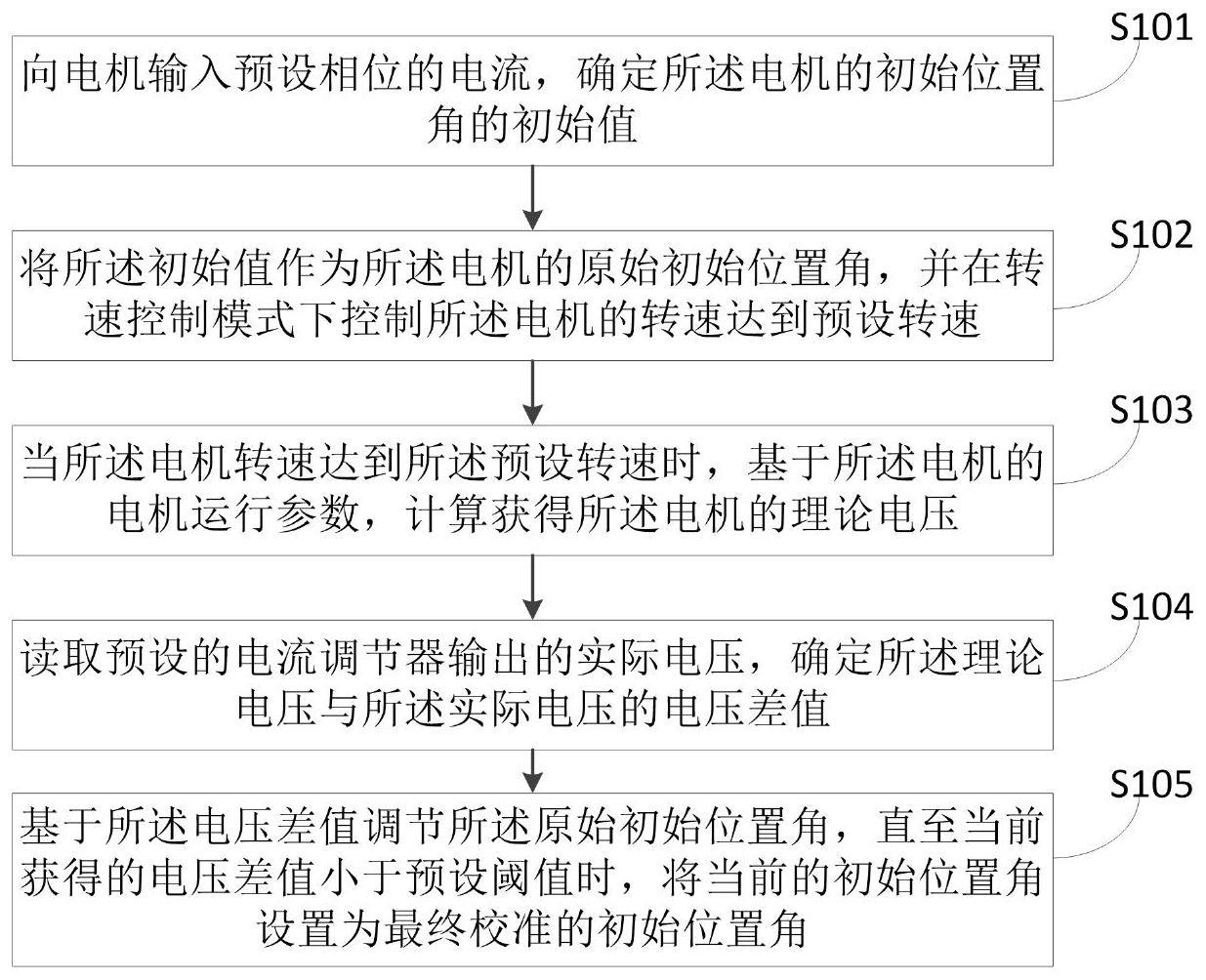
4、向电机输入预设相位的电流,确定所述电机的初始位置角的初始值;
5、将所述初始值作为所述电机的原始初始位置角,并在转速控制模式下控制所述电机的转速达到预设转速;
6、当所述电机转速达到所述预设转速时,基于所述电机的电机运行参数,计算获得所述电机的理论电压;
7、读取预设的电流调节器输出的输出电压,确定所述理论电压与所述输出电压的电压差值;
8、基于所述电压差值调节所述原始初始位置角,直至当前获得的电压差值小于预设阈值时,将当前的初始位置角设置为最终校准的初始位置角。
9、上述的方法,可选的,所述向电机输入预设相位的电流,包括:
10、在电流运行模式下检测所述电机的电机峰值电流;
11、基于所述电机峰值电流,确定待通入所述电机的电流相位;
12、按照所述电流相位向所述电机输入电流。
13、上述的方法,可选的,所述确定所述电机的初始位置角的初始值,包括:
14、控制所述电机旋转;
15、实时读取所述电机在旋转状态下位置角每次发生变化的具体值;
16、若连续多次读取到的具体值的变化在预设的变化范围内,确定当前读取的具体值为初始位置角的初始值。
17、上述的方法,可选的,所述基于所述电机的电机运行参数,计算获得所述电机的理论电压,包括:
18、确定所述电机交轴的交轴电流、交轴电感及电机实际转速;
19、基于所述交轴电流、交轴电感及电机实际转速,计算所述电机直轴的直轴理论电压,所述电机直轴的直轴理论电压为所述电机的理论电压。
20、上述的方法,可选的,所述基于所述电压差值调节所述原始初始位置角,包括:
21、获取预先设置的电压误差区间;
22、判断所述电压差值是否属于所述电压误差区间;
23、若所述电压差值属于所述电压误差区间,则确定所述初始位置角为所述电机的已校准的初始位置角;
24、若所述电压差值数据不属于所述电压差区间,则基于所述电压误差区间的最小误差或最大误差,校准所述初始位置角,获得所述电机的已校准的初始位置角。
25、上述的方法,可选的,所述基于所述电压误差区间的最小误差或最大误差,校准所述初始位置角,获得所述电机的已校准的初始位置角,包括:
26、当所述电压差值小于所述最小误差时,逐步增大所述初始位置角;在每次增大所述初始位置角后,执行已增大的初始位置角对应的检测过程,直至当前的检测过程中获得的电压差值属于所述电压误差区间时,设置最后一次增大的初始位置角为所述电机的已校准的初始位置角;
27、当所述电压差值大于所述最大误差时,逐步减小所述电机的初始位置角;在每次减小初始位置角后,执行已减小的初始位置角对应的检测过程,直至当前的检测过程中获得的电压差值属于所述电压误差区间时,设置最后一次减小的初始位置角为所述电机的已校准的初始位置角。
28、一种电机初始位置角校准装置,包括:
29、电流输入单元,用于向电机输入预设相位的电流,确定所述电机的初始位置角的初始值;
30、控制单元,用于将所述初始值作为所述电机的原始初始位置角,并在转速控制模式下控制所述电机的转速达到预设转速;
31、计算单元,用于当所述电机转速达到所述预设转速时,基于所述电机的电机运行参数,计算获得所述电机的理论电压;
32、确定单元,用于读取预设的电流调节器输出的输出电压,确定所述理论电压与所述输出电压的电压差值;
33、校准单元,用于基于所述电压差值调节所述原始初始位置角,直至当前获得的电压差值小于预设阈值时,将当前的初始位置角设置为最终校准的初始位置角。
34、上述的装置,可选的,所述电流输入单元,包括:
35、检测子单元,用于在电流运行模式下检测所述电机的电机峰值电流;
36、第一确定子单元,用于基于所述电机峰值电流,确定待通入所述电机的电流相位;
37、输入子单元,用于按照所述电流相位向所述电机输入电流。
38、上述的装置,可选的,所述电流输入单元,包括:
39、控制子单元,用于控制所述电机旋转;
40、读取子单元,用于实时读取所述电机在旋转状态下位置角每次发生变化的具体值;
41、第二确定子单元,用于若连续多次读取到的具体值的变化在预设的变化范围内,确定当前读取的具体值为初始位置角的初始值。
42、上述的装置,可选的,所述计算单元,包括:
43、第三确定子单元,用于确定所述电机交轴的交轴电流、交轴电感及电机实际转速;
44、第一计算子单元,用于基于所述交轴电流、交轴电感及电机实际转速,计算所述电机直轴的直轴理论电压,所述电机直轴的直轴理论电压为所述电机的理论电压。
45、上述的装置,可选的,所述校准单元,包括:
46、获取子单元,用于获取预先设置的电压误差区间;
47、判断子单元,用于判断所述电压差值是否属于所述电压误差区间;
48、第四确定子单元,用于若所述电压差值属于所述电压误差区间,则确定所述初始位置角为所述电机的已校准的初始位置角;
49、第一校准子单元,用于若所述电压差值数据不属于所述电压差区间,则基于所述电压误差区间的最小误差或最大误差,校准所述初始位置角,获得所述电机的已校准的初始位置角。
50、上述的装置,可选的,所述第一校准子单元,包括:
51、第二校准子单元,用于当所述电压差值小于所述最小误差时,逐步增大所述初始位置角;在每次增大所述初始位置角后,执行已增大的初始位置角对应的检测过程,直至当前的检测过程中获得的电压差值属于所述电压误差区间时,设置最后一次增大的初始位置角为所述电机的已校准的初始位置角;
52、第二校准子单元,用于当所述电压差值大于所述最大误差时,逐步减小所述电机的初始位置角;在每次减小初始位置角后,执行已减小的初始位置角对应的检测过程,直至当前的检测过程中获得的电压差值属于所述电压误差区间时,设置最后一次减小的初始位置角为所述电机的已校准的初始位置角。
53、一种存储介质,所述存储介质包括存储的指令,其中,在所述指令运行时控制所述存储介质所在的设备执行上述的电机初始位置角校准方法。
54、一种电子设备,包括存储器,以及一个或者一个以上的指令,其中一个或者一个以上指令存储于存储器中,且经配置以由一个或者一个以上处理器执行上述的电机初始位置角校准方法。
55、与现有技术相比,本发明包括以下优点:
56、本发明提供一种电机初始位置角校准方法,包括:向电机输入预设相位的电流,确定所述电机的初始位置角的初始值;将所述初始值作为所述电机的原始初始位置角,并在转速控制模式下控制所述电机的转速达到预设转速;当所述电机转速达到所述预设转速时,基于所述电机的电机运行参数,计算获得所述电机的理论电压;读取预设的电流调节器输出的输出电压,确定所述理论电压与所述输出电压的电压差值;基于所述电压差值调节所述原始初始位置角,直至当前获得的电压差值小于预设阈值时,将当前的初始位置角设置为最终校准的初始位置角。应用本发明提供的方法,可以直接通过电机自身的运行对初始位置角进行校准,无需测试台架电机拖动。
- 还没有人留言评论。精彩留言会获得点赞!