一种电动倾转旋翼飞行器的供电系统和供电方法与流程
本发明涉及电动载人飞行器,具体涉及一种电动倾转旋翼飞行器的供电系统和供电方法。
背景技术:
1、随着电动载人飞行器越来越多地活跃在大众视野中,其搭载的供电系统也越来越受到人们的重视,供电系统作为整个飞行器的能量来源,不仅是支持飞行器正常飞行的重要系统,更是关乎机组人员生命安全。随着电池、电控技术的发展,衍生出了电池管理系统,其主要是为了智能化管理及维护各个电池单元,提高电池单元的使用寿命和效率,提高电池使用安全性。
2、目前在载人电动飞行器中,其搭载的供电系统多为单一电池组对所有动力模块供电,对电池组的布置要求高,若电动载人飞行器飞行过程中,某一电池出现故障会造成整体飞行器无法正常工作的情况,安全性可靠性低。
技术实现思路
1、有鉴于此,本发明要解决的问题是提供一种电动倾转旋翼飞行器的供电系统和供电方法,能够兼顾并联和独立供电特性,电路冗余度高,有主电池组损坏的情况下,及时为每个动力模块供电,并依据飞行器飞行工况,对供电模式进行自由切换,保证飞行器飞行安全且平稳高效的运行。
2、为解决上述技术问题,本发明采用的技术方案是:
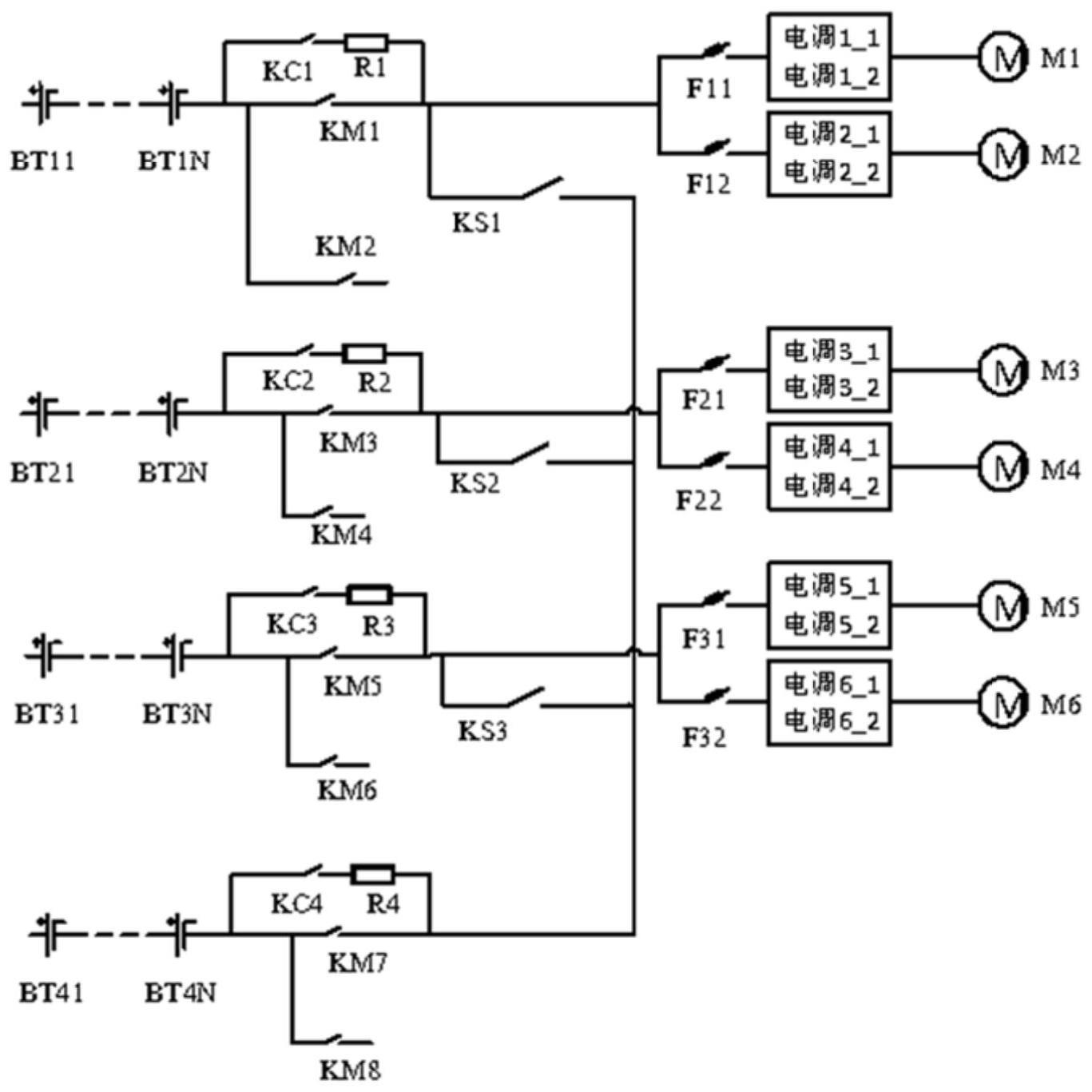
3、一种电动倾转旋翼飞行器的供电系统和供电方法,包括有若干主电池组和若干动力模块组,所述主电池组与对应动力模块组之间串接有km供电开关,所述供电系统包括有冗余电池组,所述冗余电池组通过ks冗余开关与所有主电池组均并接。
4、进一步的,所述冗余电池组和主电池组的输出端均串设有第一f熔断器。
5、进一步的,所述动力模块组包括有若干单独设置的动力模块,所述动力模块的输入端均串设有第二f熔断器。
6、进一步的,每个所述主电池组和冗余电池组均对应设置有一条结构相同的预充回路,所述预充回路包括有与主电池组共同串接的kc预充开关和r预充电阻。
7、进一步的,每个所述动力模块对应一个散热子模块,所述散热子模块包括有散热管路、散热风扇和对应的散热开关,所述散热风扇与散热开关串接设置。
8、进一步的,包括有获取飞行器的飞行模式,控制所有ks冗余开关动作,切换成对应的供电模式进行供电。
9、进一步的,所述供电模式包括有模式a,主电池组分别为对应的动力系统组独立供电;模式b,所有主电池组并联作为一个供电模块,统一为所有动力系统供电。
10、进一步的,所述供电模块充电时,获取所有主电池组和冗余电池组内的剩余电能,计算出所有主电池组和冗余电池组的预充差值,依据预充差值配备对应的充电功率,依据充电功率与预充差值获取每个电池组的充电时长。
11、进一步的,所述供电模块放电时,获取电池组内的剩余电能和所有动力模块的总用电速率,计算出供电模块的供电时长。
12、进一步的,获取各电池组的电压并判断电池组之间的压差是否低于限定阀值,是,依据需要控制km供电开关动作,否,禁止闭合对应电池组的km供电开关。
13、本发明具有的优点和积极效果是:
14、1、通过电池组交叉并联为多个动力模块(旋翼电机)供电,兼顾并联和独立供电特性,电路冗余度高,安全性有较大提升,各组电池分布式布置,大大降低了供电系统对空间要求,有利于整机重心布置。
15、2、依据飞行器飞行工况,对供电模式进行切换,在保证飞行安全性的同时,进一步提高了飞行航程,拓展了飞行器的应用场景。
16、3、充电之前对各电池单元进行检测,依据电池组内的剩余电能配置有充电速率选项,所述充电速率为通过将电池组串联或并联控制系统电压的升降从而实现供电系统的快充和慢充,提高电池的使用寿命和充电效率。
技术特征:
1.一种电动倾转旋翼飞行器的供电系统,其特征在于,包括有若干主电池组和若干动力模块组,所述主电池组与对应动力模块组之间串接有km供电开关,所述供电系统包括有冗余电池组,所述冗余电池组通过ks冗余开关与所有主电池组分别并接。
2.根据权利要求1所述的一种电动倾转旋翼飞行器的供电系统,其特征在于,所述冗余电池组和主电池组的输出端均串设有第一f熔断器。
3.根据权利要求1所述的一种电动倾转旋翼飞行器的供电系统,其特征在于,所述动力模块组包括有若干单独设置的动力模块,所述动力模块的输入端均串设有第二f熔断器。
4.根据权利要求1所述的一种电动倾转旋翼飞行器的供电系统,其特征在于,每个所述主电池组和冗余电池组均对应设置有一条结构相同的预充回路,所述预充回路包括有与主电池组共同串接的kc预充开关和r预充电阻。
5.根据权利要求3所述的一种电动倾转旋翼飞行器的供电系统,其特征在于,每个所述动力模块对应一个散热子模块,所述散热子模块包括有散热管路、散热风扇和对应的散热开关,所述散热风扇与散热开关串接设置。
6.一种根据权利要求1-5任意一项所述的一种电动倾转旋翼飞行器的供电系统的电动倾转旋翼飞行器的供电方法,其特征在于,包括有获取飞行器的飞行模式,控制所有ks冗余开关动作,切换成对应的供电模式进行供电。
7.根据权利要求6所述的一种电动倾转旋翼飞行器的供电方法,其特征在于,所述供电模式包括有模式a,主电池组分别为对应的动力系统组独立供电;模式b,所有主电池组并联作为一个供电模块,统一为所有动力系统供电。
8.根据权利要求6所述的一种电动倾转旋翼飞行器的供电方法,其特征在于,所述供电模块充电时,获取所有主电池组和冗余电池组内的剩余电能,计算出所有主电池组和冗余电池组的预充差值,依据预充差值配备对应的充电功率,依据充电功率与预充差值获取每个电池组的充电时长。
9.根据权利要求6所述的一种电动倾转旋翼飞行器的供电方法,其特征在于,所述供电模块放电时,获取电池组内的剩余电能和所有动力模块的总用电速率,计算出供电模块的供电时长。
10.根据权利要求6所述的一种电动倾转旋翼飞行器的供电方法,其特征在于,获取各电池组的电压,并判断电池组之间的压差是否低于限定阀值,是,依据需要控制km供电开关动作,否,禁止闭合对应电池组的km供电开关。
技术总结
本发明提供一种电动倾转旋翼飞行器的供电系统和供电方法,包括有若干主电池组和若干动力模块组,所述主电池组与对应动力模块组之间串接有KM供电开关,所述供电系统包括有冗余电池组,所述冗余电池组通过KS冗余开关与所有主电池组分别并接。本发明能够兼顾并联和独立供电特性,电路冗余度高,有主电池组损坏的情况下,及时为每个动力模块供电,并依据飞行器飞行工况,对供电模式进行自由切换,保证飞行器飞行安全且平稳高效的运行。
技术研发人员:郎懿,赵萌,张磊,唐鹏,曹群
受保护的技术使用者:零重力飞机工业(合肥)有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!