基于神经元比例积分-模糊积分算法的双闭环BLDC控制器的制作方法
本发明涉及自动控制,尤其涉及一种基于神经元比例积分-模糊积分算法的双闭环bldc控制器。
背景技术:
1、bldc(无刷直流电机)常用驱动方式有六步换相法、正弦脉冲宽度调制(sinusoidal pulse width modulation,spwm)和空间矢量脉宽调制(space vectorpulsewidth modulation,svpwm)。其中,svpwm是一种根据空间电压矢量切换来控制bldc电流大小和方向的驱动方法,这种驱动方式可以使bldc运行电流呈现正弦波型,减小转矩脉动,同时还比其他驱动方式有着更高的电压利用率。在svpwm驱动的基础上,磁场定向控制(field-orientated control,foc)完成了磁链解耦,简化了bldc闭环控制过程,是驱动器伺服控制系统的重点研究对象。foc工作原理如图1所示。
2、bldc是通过驱动电流控制电机转矩,进而控制其旋转加速度的机电单元,伺服驱动器完成bldc定速控制,现有技术使用的是转速环+电流环的双闭环控制策略,如下图2所示。
3、现有技术中,foc控制器使用了两个pi控制器分别完成转速和电流闭环,整定过程较为复杂,并且在负载变化的情况下很难达到较好的控制效果。
技术实现思路
1、本发明旨在提供一种基于神经元比例积分-模糊积分算法的双闭环bldc控制器,能够提升伺服驱动器的控制性能,简化pi控制器参数整定过程,加强对负载变化的适应度。
2、为达到上述目的,本发明是采用以下技术方案实现的:
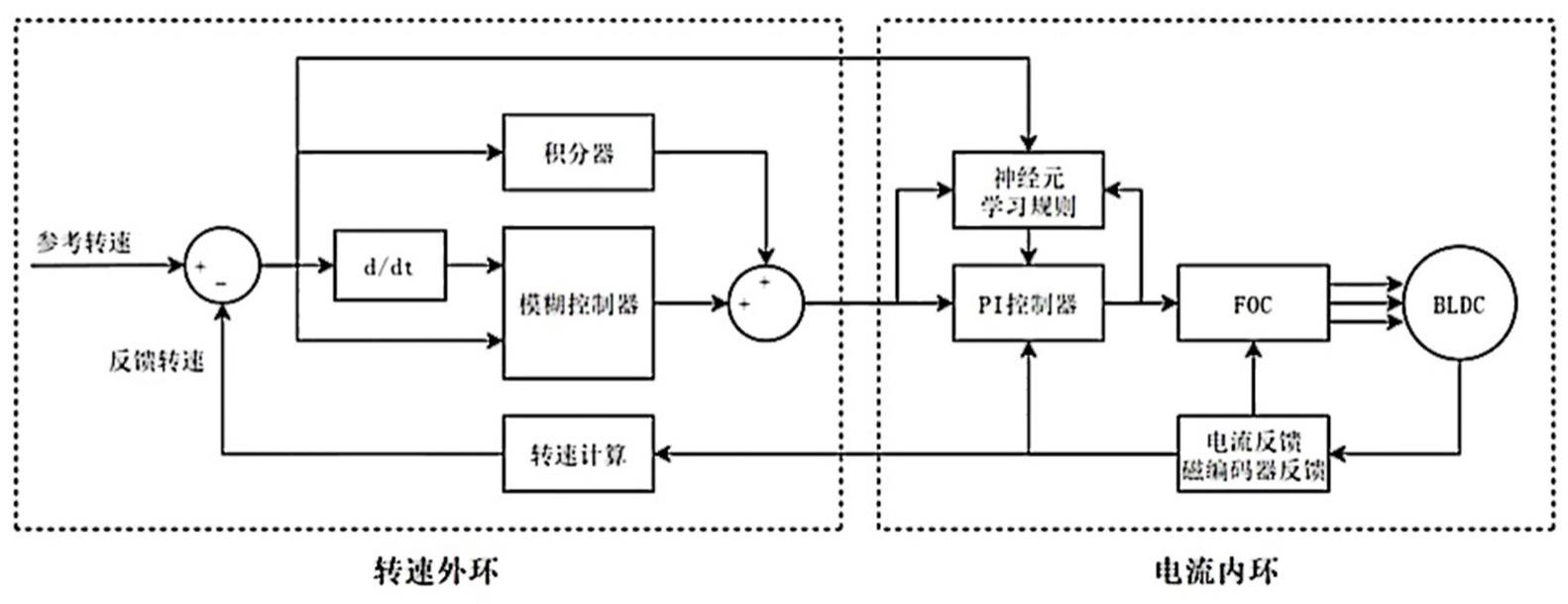
3、基于神经元比例积分-模糊积分算法的双闭环bldc控制器,包括用于实现bldc定速控制的转速环、电流环,其特征在于,所述转速环包括模糊控制器,所述电流环包括pi控制器,所述pi控制器包括神经元学习规则。
4、进一步的,本发明还包括foc,所述foc的输出连接bldc,所述pi控制器的输出、bldc的反馈电流以及编码器的输出为foc的输入。
5、优选的,所述神经元学习规则如下:
6、其中系数k为定常值,设神经元的两个输入量分别为和,电流环误差为,则神经元输入如下:
7、(1)
8、其中系数k为定常值,,设和分别为pi控制器的比例和积分控制参数,根据增量式pi控制算法u(k)=u(k-1)+△u(k),△u(k)是执行机构的增量,输出控制量u(k)为:
9、(2)
10、其中系数k为定常值,参数 和 的在线更新采用有监督hebb学习规则,并通过前馈支路引入速度环误差作为教师信号,本发明学习算法如下:
11、(3)
12、优选的,所述模糊控制器的输入模糊化采用分档模糊集法,分档模糊集法将模糊集合论域上的精确量分成若干档,每一档对应一个模糊集合。输出去模糊化采用重心法。
13、进一步优选的,所述模糊控制器,模糊控制器的模糊控制规则如下表:
14、
15、表中:速度环误差,为转速误差的差分,p、z、n分别为输入、输出论域划分的三档正、零、负。
16、进一步的,在模糊控制器上复合有积分器,所述积分器的输入为,输出与模糊控制器的输出叠加后作为pi控制器的输入。
17、进一步的,本发明还包括电路,所述电路包括mcu、电源电路、三相全桥驱动电路、电流及位置反馈电路,所述三相全桥驱动电路、电流及位置反馈电路连接mcu,所述电源电路用于提供电路的工作电源及bldc的驱动电源,所述mcu固化有转速环、电流环。电流环完全在伺服驱动器内部进行,通过霍尔装置检测驱动器给电机的各相的输出电流,负反馈给电流的设定进行pi调节,从而达到输出电流尽量接近等于设定电流,电流环就是控制电机转矩的,所以在转矩模式下驱动器的运算最小,动态响应最快。转速环通过检测的伺服电机编码器的信号来进行负反馈pi调节,它的环内pi输出直接就是电流环的设定,所以速度环控制时就包合了速度环和电流环,换句话说任何形势都必须使用电流环,电流环是控制的根本,在速度和位置控制的同时系统实际也在进行电流(转矩)的控制以达到对速度和位置的相应控制。
18、进一步的,所述三相全桥驱动电路包括预驱动芯片,所述预驱动芯片连接三相全桥。
19、优选的,所述电源电路的输入为稳压直流电,所述稳压直流电用于电机驱动系统和控制系统供电,所述稳压直流电的直流母线之间连接吸收电容、钳位二极管以及浪涌吸收电路,所述浪涌吸收电路包括串联在直流母线上的电阻r11、与电阻r11并联的电阻r12,tvs管d5的一端连接电阻r11的一端并跨接在直流母线之间。
20、优选的,所述稳压直流电通过ldo线性降压芯片降压后为控制系统供电。
21、本发明用于伺服驱动器,能够提升伺服驱动器的控制性能,简化pi控制器参数整定过程,加强伺服驱动器对负载变化的适应度。
技术特征:
1.基于神经元比例积分-模糊积分算法的双闭环bldc控制器,包括用于实现bldc定速控制的转速环、电流环,其特征在于,所述转速环包括模糊控制器,所述电流环包括pi控制器,所述pi控制器包括神经元学习规则。
2.根据权利要求1所述的基于神经元比例积分-模糊积分算法的双闭环bldc控制器,其特征在于,还包括foc,所述foc的输出连接bldc,所述pi控制器的输出、bldc的反馈电流以及编码器的输出为foc的输入。
3.根据权利要求1或2所述的基于神经元比例积分-模糊积分算法的双闭环bldc控制器,其特征在于,所述神经元学习规则如下:
4.根据权利要求3所述的基于神经元比例积分-模糊积分算法的双闭环bldc控制器,其特征在于,所述模糊控制器的输入模糊化采用分档模糊集法,分档模糊集法将模糊集合论域上的精确量分成若干档,每一档对应一个模糊集合;输出去模糊化采用重心法。
5.根据权利要求4所述的基于神经元比例积分-模糊积分算法的双闭环bldc控制器,其特征在于,所述模糊控制器的模糊控制规则如下表:
6.根据权利要求5所述的基于神经元比例积分-模糊积分算法的双闭环bldc控制器,其特征在于,在模糊控制器上复合有积分器,所述积分器的输入为,输出与模糊控制器的输出叠加后作为pi控制器的输入。
7.根据权利要求4-6任一项所述的基于神经元比例积分-模糊积分算法的双闭环bldc控制器,其特征在于,还包括电路,所述电路包括mcu、电源电路、三相全桥驱动电路、电流及位置反馈电路,所述三相全桥驱动电路、电流及位置反馈电路连接mcu,所述电源电路用于提供电路的工作电源及bldc的驱动电源,所述mcu固化有转速环、电流环;电流环完全在伺服驱动器内部进行,通过霍尔装置检测驱动器给电机的各相的输出电流,负反馈给电流的设定进行pi调节,从而达到输出电流尽量接近等于设定电流,电流环就是控制电机转矩的,所以在转矩模式下驱动器的运算最小,动态响应最快;转速环通过检测的伺服电机编码器的信号来进行负反馈pi调节,它的环内pi输出直接就是电流环的设定,所以速度环控制时就包合了速度环和电流环,换句话说任何形势都必须使用电流环,电流环是控制的根本,在速度和位置控制的同时也在进行电流(转矩)的控制以达到对速度和位置的相应控制。
8.根据权利要求7所述的基于神经元比例积分-模糊积分算法的双闭环bldc控制器,其特征在于,所述三相全桥驱动电路包括预驱动芯片,所述预驱动芯片连接三相全桥。
9.根据权利要求8所述的基于神经元比例积分-模糊积分算法的双闭环bldc控制器,其特征在于,所述电源电路的输入为稳压直流电,所述稳压直流电用于电机驱动和供电,所述稳压直流电的直流母线之间连接吸收电容、钳位二极管以及浪涌吸收电路,所述浪涌吸收电路包括串联在直流母线上的电阻r11、与电阻r11并联的电阻r12,tvs管d5的一端连接电阻r11的一端并跨接在直流母线之间。
10.根据权利要求9所述的基于神经元比例积分-模糊积分算法的双闭环bldc控制器,其特征在于,所述稳压直流电通过ldo线性降压芯片降压后为驱动器伺服控制系统供电。
技术总结
本发明公开一种基于神经元比例积分‑模糊积分算法的双闭环BLDC控制器,包括用于实现BLDC定速控制的转速环、电流环,其特征在于,所述转速环包括模糊控制器,所述电流环包括PI控制器,所述PI控制器包括神经元学习规则。本发明能够提升伺服驱动器的控制性能,简化PI控制器参数整定过程,加强对负载变化的适应度。
技术研发人员:古秋翔,徐飞飞,陈明艳,邱玺,陈晓雪
受保护的技术使用者:成都创科升电子科技有限责任公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!