超高速永磁同步电机转子位置和转速估计方法
本发明属于超高速永磁同步电机控制,涉及一种超高速永磁同步电机转子位置和转速估计方法。
背景技术:
1、超高速永磁同步电机转速高、体积小、功率密度高,转子和高速负载直接相连,摆脱了传统“低速电机+变速装置”的机械结构,提高了系统集成度和可靠性,在军事、工业等领域具有广泛的应用价值。超高速永磁同步电机通常指转速高于100000r/min的永磁同步电机,其控制性能严重依赖于转子位置的准确获取。然而,常规机械传感器的最高检测速度不超过40000r/min,不能检测到超高速永磁同步电机高速区的转子位置,且超高速永磁同步电机要求转子尽量短,因此难以在转子上安装机械传感器。此外,安装机械传感器不但会增加系统的体积和成本,而且会降低系统的可靠性。因此,超高速永磁同步电机无位置传感器控制技术至关重要。
2、目前,通常采用复合观测器估计超高速永磁同步电机全速域的转子位置和转速,复合观测器采用适用于低速和适用于中高速的两种观测器进行复合控制,实现全速域转子位置估计。然而,超高速永磁同步电机转动惯量小、动态响应快,采用复合观测器估计方法快速启动时过渡区转子位置和转速易发生振荡,甚至导致启动失败。并且超高速永磁同步电机额定转速超过100000r/min,要求驱动系统开关频率高,因而要求转子位置估计算法执行时间短,导致复合观测器估计方法难以精确离散,当电机在超高速运行时,载波比低,导致复合观测器估计方法难以准确估计转子位置和转速,甚至导致系统发散。
技术实现思路
1、本发明的目的是提供一种超高速永磁同步电机转子位置和转速估计方法,解决了现有复合观测器估计方法快速启动时过渡区转子位置和转速易发生振荡、电机超高速运行时难以准确估计转子位置和转速,导致系统发散的问题。
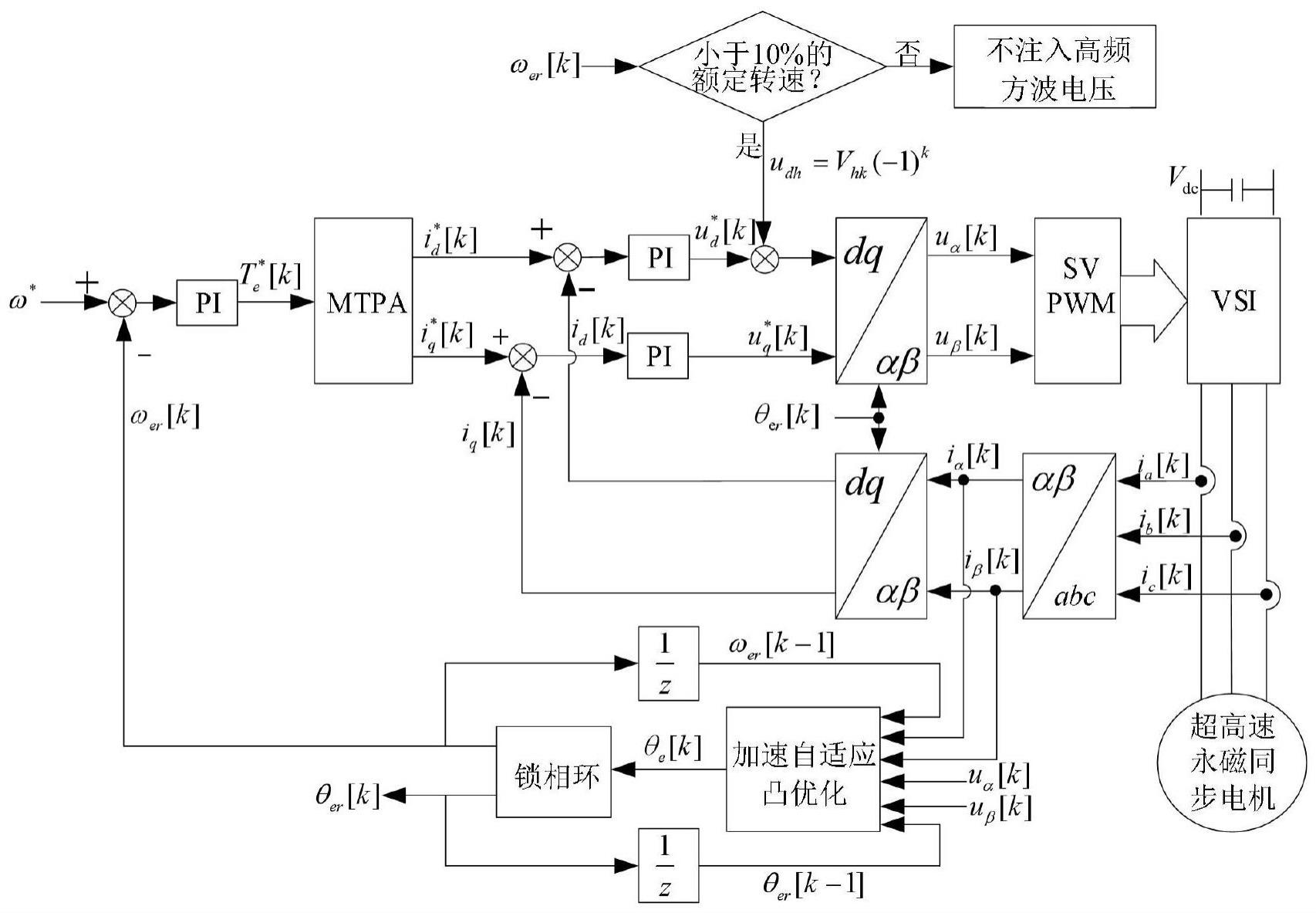
2、本发明所采用的技术方案是,超高速永磁同步电机转子位置和转速估计方法,具体包括如下步骤:
3、步骤1,建立考虑铁损电阻的超高速永磁同步电机全速域转子位置代价函数;
4、步骤2,由步骤1得到的全速域转子位置代价函数通过加速自适应凸优化估计初步转子位置;
5、步骤3,由步骤2中得到的估计初步转子位置通过锁相环估计超高速永磁同步电机的转子位置和转速。
6、本发明的特点还在于:
7、步骤1的具体过程为:
8、考虑铁损的超高速永磁同步电机在两相静止坐标系的电压方程如下公式(1)所示:
9、
10、其中,ri=(ωr(k))2ldlq/ri是铁损,ωr(k)是第k拍转子电角频率,ld是d轴电感,lq是q轴电感,ri是铁损电阻,uα(k)、uβ(k)分别是第k拍定子电压在α轴和β轴的分量,iα(k)、iβ(k)分别是第k拍定子电流在α轴和β轴的分量,rs是定子电阻;
11、
12、
13、θr(k)是第k拍实际转子位置,l1=0.5(ld+lq),l2=0.5(ld-lq),ts是开关周期,δiα(k)=iα(k)-iα(k-1),δiβ(k)=iβ(k)-iβ(k-1),ψf是永磁体磁链;
14、为了分离与转子位置无关项,定义中间变量如下公式(2)所示:
15、
16、其中,eα(k)、eβ(k)分别是第k拍不包含转子位置信息的中间变量在α轴和β轴的分量;
17、由公式(1)和公式(2)可得转子位置相关函数如下公式(3)所示:
18、
19、其中,fα(θe(k))、fβ(θe(k))分别是第k拍转子位置相关函数在α轴和β轴的分量,f(θe(k))=[fα(θe(k)) fβ(θe(k))]t;
20、由公式(3)构建转子位置代价函数如下公式(4)所示:
21、
22、其中,h(θe(k))是转子位置代价函数;
23、为了保证转子位置的可解性,转子位置代价函数式(4)至少是局部凸函数,在静止及低速区和中高速区转子位置代价函数,简化为如下公式(5)所示:
24、
25、为了在静止和低速增加转子位置代价函数的凸度,在10%额定转速以下注入高频方波电压如下公式(6)所示:
26、
27、其中,udh、uqh分别是在d轴和q轴注入的高频方波电压,vh是注入高频方波电压的振幅。
28、步骤2的具体过程为:
29、步骤2.1,计算加速自适应凸优化的加速迭代步长;
30、步骤2.2,加速自适应凸优化估计初步转子位置。
31、步骤2.1的具体过程为:
32、根据公式(3)计算自适应因子如下公式(7)所示:
33、
34、其中,是自适应因子,λi是自适应系数,i表示第i次迭代;
35、根据公式(3)和公式(7)计算自适应加速凸优化的迭代步长如下公式(8)所示:
36、
37、其中,li是自适应加速凸优化的迭代步长,r(θe(i))是当前步雅可比矩阵或在上一次迭代中使用的雅可比矩阵,当前步雅可比矩阵i是单位矩阵;
38、根据公式(3)、公式(7)和公式(8)计算自适应加速凸优化的近似迭代步长如下公式(9)所示:
39、
40、其中,gi是自适应加速凸优化的近似迭代步长;
41、根据公式(8)和公式(9)计算自适应加速凸优化的加速迭代步长如下公式(10)所示:
42、ci=li+σigi (10);
43、其中,ci是自适应加速凸优化的加速迭代步长,σi为可调参数。
44、步骤2.2的具体过程为:
45、为验证当前迭代步的有效性,采用自适应评价指标如下公式(11)所示:
46、
47、其中,ei是自适应评价指标;
48、根据公式(11)计算的结果是否接受本次迭代计算的加速迭代步长如下公式(12)所示:
49、
50、其中,d0是加速迭代步长取舍指标,θe(i+1)是第i+1迭代得到的转子位置;
51、根据公式(11)计算的结果计算可调参数σi+1如下公式(13)所示:
52、
53、根据公式(11)计算的结果是否选择更新雅克比矩阵r(θe(i+1))如下公式(14)所示:
54、
55、其中,d1是更新雅克比矩阵的自适应评价指标ei的下限阀值,x是当前雅克比矩阵使用的次数,xmax是同一雅可比矩阵使用的最大次数;
56、根据公式(11)计算的结果是否选择更新自适应系数λi+1如下公式(15)所示:
57、
58、其中,λmin是自适应系数的最小值,d2是自适应因子时自适应评价指标ei的下限阀值,d3是自适应因子时自适应评价指标ei的上限阀值;
59、根据公式(11)计算的结果是否选择自适应因子如下公式(16)所示:
60、
61、步骤3的具体过程为:
62、由加速自适应凸优化估计的初步转子位置θe(k)与锁相环上一拍输出的估计转子位置θer(k-1)做差计算转子位置误差如下公式(17)所示:
63、δθ(k)=θe(k)-θer(k-1) (17);
64、其中,θe(k)是加速自适应凸优化估计的第k拍初步转子位置,θer(k-1)是锁相环第k-1拍输出的估计转子位置,δθ(k)是第k拍转子位置误差;
65、第k拍转子位置误差δθ(k)通过pi调节器调节得到估计的转速如下公式(18)所示:
66、
67、其中,ωer(k)是估计的第k拍转子转速,kp是pi的比例增益,ki是pi的积分增益;
68、第k拍转子转速ωer(k)通过积分得到第k拍转子位置如下公式(19)所示:
69、θer(k)=θer(k-1)+ωer(k)ts (19);
70、其中,θer(k)是估计的第k拍转子位置。
71、本发明的有益效果是,本发明采用加速自适应凸优化方法估计全速域超高速永磁同步电机转子位置和转速,单一方法实现全速域转子位置估计,没有过渡区,从根本上解决了超高速永磁同步电机由于转动惯量小、动态响应快,过渡区估计的转子位置和转速易发生振荡,甚至导致启动失败的问题。同时,对于超高速永磁同步电机驱动系统,开关频率高,要求算法执行时间短,采用的加速自适应凸优化方法通过自适应因子和加速迭代步长提高算法收敛速度,通过自适应更新雅克比矩阵降低平均每次迭代的计算量,从而保证在算法执行时间短约束下准确估计超高速永磁同步电机全速域的转子位置和转速。
- 还没有人留言评论。精彩留言会获得点赞!