一种永磁直线同步电机无模型自适应控制方法
本发明涉及电机控制,具体涉及一种永磁直线同步电机无模型自适应控制方法。
背景技术:
1、随着我国城市之间、城镇之间互相促进和依存关系的不断加强,以及城市核心区域迅速扩张,加强各区域之间快速、安全、舒适的交通互联越来越重要,因此对我国轨道交通行业提出来了更多要求。
2、传统的轨道交通领域仍采用旋转电机作为牵引装置,但是传统电机无法满足轨道交通汇总路线复杂,行程较远的要求,而且旋转电机牵引使用轮轨之间的物理粘着力,车辆的速度、加速度以及爬坡性能等都会受到一定限制。永磁直线同步电机(pmlsm)因其具有功率密度高、推力大、动态特性高和加速度大等优势,在轨道交通领域得到了广泛的关注和应用。目前永磁直线电机在轨道交通领域多采用直接推力控制,且为闭环控制,通常采用pi控制器作为调节方式,但如遇工况较为复杂时,需要重新调整参数。然而现代控制理论大部分的控制方式是基于理想的数学模型进行控制,在发生参数时变等影响的时候可能发生波动,使得控制系统不稳定。
3、专利号为cn201810729163.1的中国发明专利,针对永磁直线同步电机公开了一种基于等效控制的离散时间终端滑模控制,并设计了扰动补偿系统抗干扰性。该发明技术方案所公开的控制器是基于直线电机的数学模型且设计了扰动补偿对负载扰动等非线性扰动进行抑制。在电机实际运行过程中,电机数学模型会随温度及环境的变化而变化,导致设计控制器所使用的电机参数不准确,而且设计的扰动补偿策略会增加算法和硬件实现方面的复杂程度。
技术实现思路
1、针对现有技术所存在的上述缺陷,本发明提出了一种永磁直线同步电机无模型自适应控制方法,其目的是削弱永磁直线同步电机直接推力控制系统易受到端部效应、参数时变、负载扰动等非线性扰动所造成的控制系统不稳定的技术问题。
2、发明的技术方案如下:
3、一种永磁直线同步电机无模型自适应控制方法,包括如下步骤,
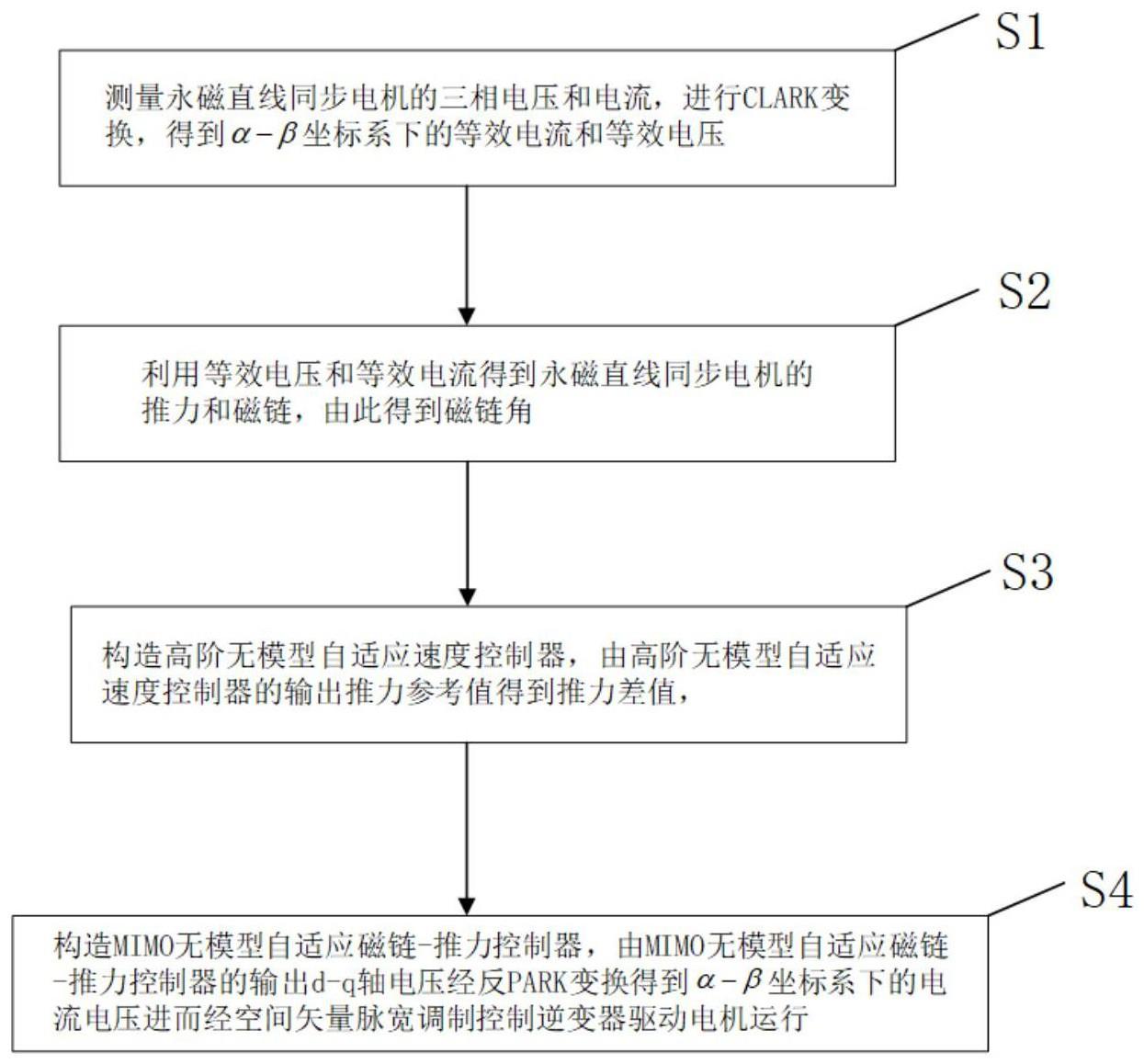
4、s1:测量永磁直线同步电机的三相电流ia、ib、ic,三相电压ua、ub、uc,进行clark变换,得到α-β坐标系下的等效电流iα、iβ和等效电压uα、uβ;
5、s2:利用α-β坐标系下的等效电流iα、iβ和等效电压uα、uβ计算永磁直线同步电机的推力fe、磁链ψs;
6、s3:构建高阶无模型自适应速度控制器,由高阶无模型自适应速度控制器将推力参考值fe*与步骤s2中推力fe作差得到推力差值δfe,将给定磁链ψs*与步骤s2计算出的磁链ψs作差得到磁链差值δψs;
7、s4:将步骤s3中的推力差值δfe与磁链差值δψs输入到磁链-推力mimo无模型自适应控制器计算得到d-q轴电压ud、uq,将ud、uq经ipark变换变得到α-β坐标系下电压u′α、u′β,利用α-β坐标系下电压u′α、u′β产生的svpwm信号控制逆变器产生三相电压驱动永磁同步直线电机运转。
8、进一步地,步骤s3中所述高阶无模型自适应速度控制器的构建步骤为,
9、s301:构建永磁直线同步电机直接推力控制离散系统速度环
10、v(k+1)=f(v(k),...,v(k-σv),fe(k),...,fe(k-σfe))
11、其中,v(k+1)为k+1时刻的电机转速,fe(k)为k时刻电机的推力,其中σv,σfe表示系统输入输出所在时刻的值,为正整数;
12、s302:建立永磁同步直线电机直接推力控制速度环高阶紧格式动态线性化数据模型
13、
14、其中,δv(k+1)=v(k+1)-v(k)为k时刻到k+1时刻永磁直线同步电机的输出转速变化量;δfe(k)=fe(k)-fe(k-1)为k-1时刻到k时刻永磁直线同步电机的推力变化量;为永磁直线同步电机直接推力控制系统速度环的伪偏导数;
15、s303:构建的高阶无模型自适应速度控制器为
16、其中直接推力控制系统速度环的控制律为
17、
18、其中,λ为控制律中的权重因子,ρ1、ρ2为控制律中的步长因子,
19、控制律汇总的伪偏导数估计律为
20、
21、
22、其中,μ1、μ2为偏导数估计律的权重因子,η1、η2、η3、η4为偏导数估计律的步长因子,m为偏导数的阶数,α、β为偏导数的加权系数。
23、进一步地,σv,σfe等于1。
24、进一步地,步骤s3中高阶无模型自适应速度控制器计算推力参考值fe*的方法为,由输入的给定速度v*和由电机采集到的速度v作差得到速度差值δv,将速度差值δv输入到高阶无模型自适应速度控制器中得到推力参考值fe*。
25、进一步地,步骤s4中磁链-推力mimo无模型自适应控制器的构建步骤为,
26、s401:构建永磁直线同步电机直接推力控制离散系统
27、y(k+1)=f(y(k),...,y(k-σy),u(k),...,u(k-σu))
28、其中,y(k+1)为k+1时刻的电机磁链和推力,u(k)为k时刻电机d-q轴电压控制输入,其中σy,σu表示系统输入输出所在时刻的值,为正整数;
29、s402:建立永磁同步直线电机直接推力控制磁链-推力mimo无模型自适应控制器紧格式动态线性化数据模型
30、
31、其中,为永磁直线同步电机直接推力控制系统磁链-推力环的伪偏导数矩阵,δy(k+1)=y(k+1)-y(k)为k时刻到k+1时刻永磁直线同步电机的磁链-推力变化量,δu(k)=u(k)-u(k-1)为k-1时刻到k时刻永磁直线同步电机的d-q轴电压控制输入变化量;
32、s403:构建的磁链-推力环mimo无模型自适应控制器为
33、其中,永磁直线同步电机直接推力控制系统磁链-推力环的控制律为
34、
35、其中,λ为控制律中的权重因子,ρ为控制律中的步长因子
36、偏导数估计律为:
37、
38、其中μ为偏导数估计律的权重因子,η为偏导数估计律的步长因子。
39、进一步地,σy,σu等于1。
40、进一步地,步骤s1中利用α-β坐标系下的等效电流iα、iβ和等效电压uα、uβ计算永磁直线同步电机的推力fe、磁链ψs的方法为
41、
42、
43、本发明与现有技术相比具有如下优点:
44、1.本发明提出的永磁直线同步电机无模型自适应控制方法,为高阶无模型自适应控制方法,属于一种数据驱动控制方法,对传统的pi控制器的收敛速度慢、误差精度不高的缺陷进行了优化,提高了永磁直线同步电机的控制精度。
45、2.本发明提出的永磁直线同步电机无模型自适应控制方法,其中磁链-推力mimo无模型自适应控制器是将磁链环和推力环的两个pi控制器合并为一个磁链-推力mimo无模型自适应控制器,以进一步提高直接推力控制系统的控制性能。
- 还没有人留言评论。精彩留言会获得点赞!