一种应用于三电平逆变器的经济模型预测控制方法
本发明涉及功率变流器,尤其涉及一种应用于三电平逆变器的经济模型预测控制方法。
背景技术:
1、近年来,多电平变流器在各种大功率应用中得到了广泛应用,包括电机驱动,可再生能源发电和微电网等。在中性点箝位(npc)、飞电容多单元、级联h桥和模块化多电平变流器等多电平变流器拓扑中,三电平中性点箝位(3l-npc)逆变器具有结构简单、易于实现双向能量流的优点。为了减少3l-npc逆变器中的半导体数量和中性点电压波动,三电平稀疏中性点箝位(3l-snpc)逆变器是一个有效的解决方案。目前,3l-snpc逆变器的控制仍然是一个具有挑战性的问题,因为系统具有很强的非线性;而且逆变器作为电源和电网之间的接口,对可靠供电和高电能质量起着至关重要的作用,3l-snpc逆变器的稳定性对整个并网系统至关重要,但现有的控制策略难以保证逆变器的稳定性。
2、随着微处理器的快速发展,源于过程控制的模型预测控制(mpc)因其对近年来已经在功率变流器领域得到广泛应用。根据mpc是否需要常规调制来确定开关状态,mpc被分为连续控制集mpc(ccs-mpc)和有限控制集mpc(fcs-mpc)。fcs-mpc因为不需要pwm等调制技术,可以直接对开关状态完成评估,成为变流器控制中最受欢迎的控制策略之一。fcs-mpc是在惩罚与期望状态的偏差的正定二次函数评估所有可能的开关状态,以确定最佳开关状态。然而,它忽略了远离期望状态的动态经济性。最近,经济模型预测控制(empc)在过程控制引起了广泛关注。与fcs-mpc相比,empc在目标函数使用的是一般成本函数,在保证跟踪性能的同时,提高动态过程中的经济性能。
3、中国专利公开号:cn111682791a,公开了一种两段式有限集模型预测控制方法,首先将预测周期的第一个矢量选择为上周期作用的第二个开关矢量;其次根据开关矢量作用时间与作用误差成反比原则,分别计算第一开关矢量与所有有效开关矢量不同组合时对应的作用时间;最后根据不同开关组合对应的作用时间,进行两段式电流输出预测,并选取电流跟随性最好的一组开关组合作为系统的最终输出,从而确定预测周期第二个开关矢量,以及两个矢量分别对应的作用时间;由此可见,所述两段式有限集模型预测控制方法存在以下问题:未能针对动态过程中的经济性能进行提高,且没有保证稳定性。
技术实现思路
1、为此,本发明提供一种应用于三电平逆变器的经济模型预测控制方法,用以克服现有技术中未能针对动态过程中的经济性能进行提高的问题。
2、为实现上述目的,本发明提供一种应用于三电平逆变器的经济模型预测控制方法,包括:
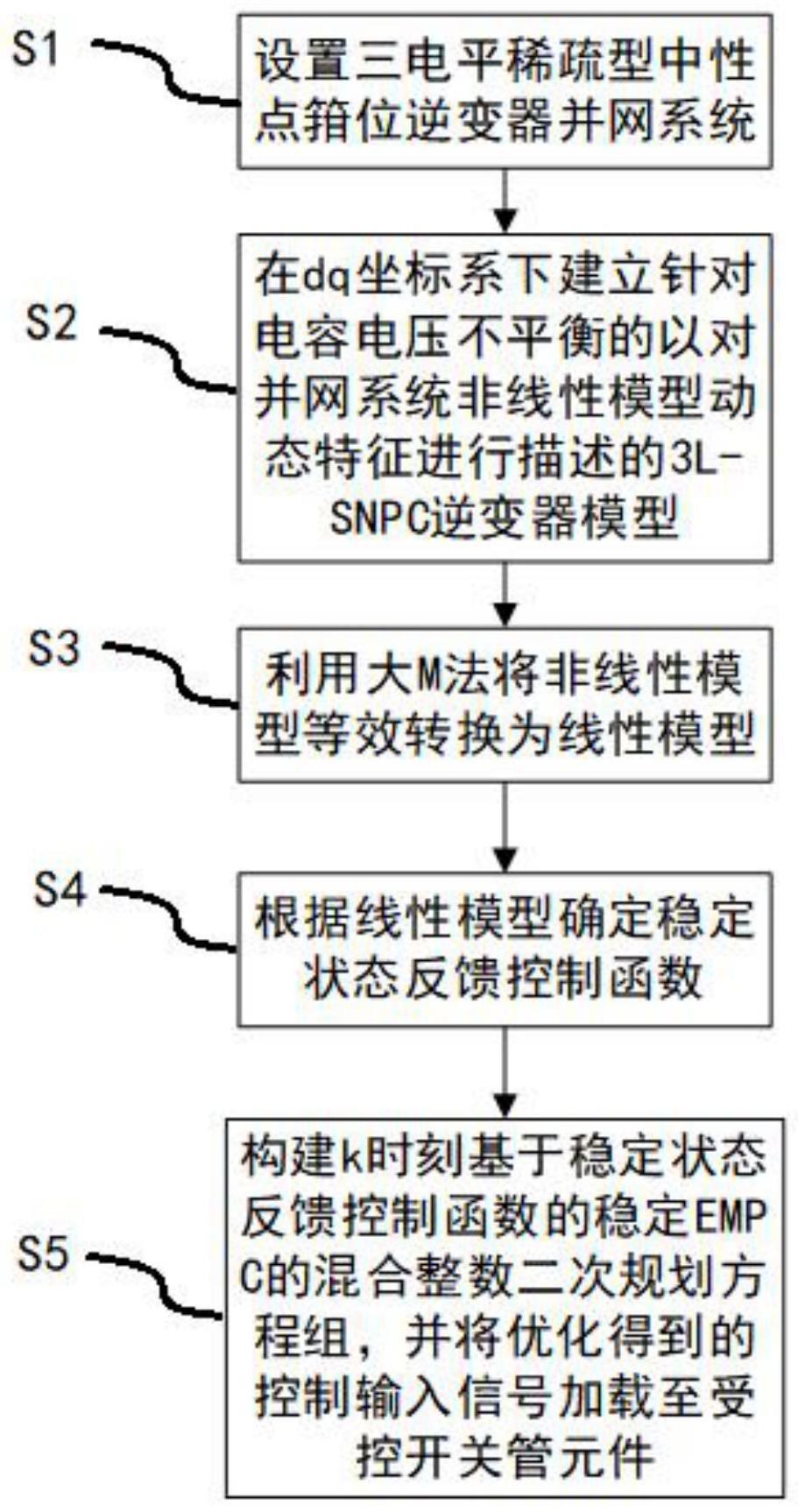
3、步骤s1,设置三电平稀疏型中性点箝位逆变器并网系统;
4、步骤s2,在dq坐标系下建立针对电容电压不平衡的以对并网系统非线性模型动态特征进行描述的3l-snpc逆变器模型;
5、步骤s3,利用大m法将非线性模型等效转换为线性模型;
6、步骤s4,根据线性模型确定稳定状态反馈控制函数;
7、步骤s5,构建k时刻基于稳定状态反馈控制函数的稳定empc的混合整数二次规划方程组,并将优化得到的控制输入信号加载至受控开关管元件。
8、进一步地,所述并网系统包括直流电源、3l-snpc逆变器拓扑以及电网,其中,3l-snpc逆变器拓扑包括10个受控开关管、滤波电阻以及电感。
9、进一步地,所述3l-snpc逆变器模型的表达式为:
10、
11、
12、
13、其中,x=[x1 x2 x3]t=[id iq vo]t,id、iq为通过对三相电流使用park-clarke得到的转换参数,vo为中性点电压,r为电阻,l为电感,ed、eq为通过对三相电压使用park-clarke得到的转换参数,vdc为输入电压,其中,
14、
15、u=[u1 u2 u3 u4 u5]t=[sdc1 sdc2 sta stb stc]t,sdc1、sdc2、sta、stb、stc分别为五个开关量,其中每个开关量分别控制一组开关管的关断,
16、
17、
18、
19、θ=2πft,f为电网频率。
20、进一步地,通过向前差分法对对应数据进行离散,并定义向量,向量的表达式为:
21、
22、
23、其中,i为单位矩阵,θ(k)=2πfkts,ts为预设采样时长,bc的计算公式为:
24、
25、
26、
27、
28、
29、进一步地,在所述步骤s3中,将所述3l-snpc逆变器非线性模型转换为线性模型,对x(k+1)进行计算,其中x(k+1)的计算式为:
30、其中,
31、
32、进一步地,设定针对v1(k)=u1(k)u3(k)的大m法转换不等式组,所述不等式组为:
33、-mu1(k)≤v1(k)≤mu1(k),
34、u3(k)-m(1-u1(k))≤v1(k)≤u3(k)+m(1-u1(k)),
35、其中,m为预设整数,并通过大m法将v2(k)=u2(k)u3(k),...,v6(k)=u2(k)u5(k)转换整理得到:fv(k)+gu(k)≤0,其中,
36、
37、
38、
39、进一步地,通过大m法将转换为:
40、
41、
42、并通过大m法将进行转化整理得到:hvx(k)+wv(k)+sx(k)≤0,其中,
43、
44、
45、
46、
47、进一步地,对所述线性模型与线性约束不等式进行整理,以获取带线性约束不等式的线性模型:
48、x(k+1)=x(k)+ts(ax(k)+buc(k)+e)
49、 =(i+ats)x(k)+btsuc(k)+ets
50、 =adx(k)+bduc(k)+ed
51、
52、fv(k)+gu(k)≤0
53、hvx(k)+wv(k)+sx(k)≤0
54、确定该线性模型的状态反馈函数,其中状态反馈函数的表达式为:
55、
56、
57、其中q均为正定矩阵。
58、进一步地,设置稳定性约束不等式:
59、
60、其中,x★为设定点,为对应输入,δq为误差界限。
61、进一步地,构建k时刻基于稳定状态反馈控制律函数的稳定empc的混合整数二次规划方程组,设置目标函数为:
62、le(x(k),u(k))=w1l1+w2l2+w3l3
63、其中,w1,w2,w3为权重系数,
64、
65、为设定点,nc是从当前开关状态切换到评估中的开关状态所需的换向次数,对状态量x(k)与控制量u(k)分别设置状态约束与控制约束,以构成k时刻稳定性约束下的混合整数二次规划方程组,并在完成对混合整数二次规划方程组的构建完成时将优化得到的控制输入加载到受控开关管元件。
66、与现有技术相比,本发明的有益效果在于,解决了三电平稀疏型中性点箝位逆变器非线性优化导致的计算负担问题,同时解决了其在动态过程中忽略开关损耗的问题。本方法主要包括:建立在dq坐标系下考虑电容电压不平衡的3l-snpc逆变器模型;利用大m法将非线性模型等效转换为线性模型;根据线性模型设计稳定状态反馈控制函数,构造稳定性约束。本发明的有限集经济模型预测控制方法与传统的有限集模型预测控制方法相比较,保证了系统跟踪性能的同时,提高动态过程之中的经济性能。
67、进一步地,设置三电平稀疏型中性点箝位逆变器并网系统,在保证了逆变器跟踪的准确性的同时,进一步提高了动态过程中的经济性能。
68、进一步地,设定3l-snpc逆变器模型的表达式,在保证了逆变器跟踪的准确性的同时,进一步提高了动态过程中的经济性能。
69、进一步地,通过向前差分法将对应数据进行离散,并定义向量,在保证了预测精度的同时,进一步提高了动态过程中的经济性能。
70、进一步地,将所述3l-snpc逆变器非线性模型转换为线性模型,线性模型具有很强的非线性,通过使用大m法将非线性模型转换为带线性约束的线性模型,在保证了预测精度、有效的降低了计算压力的同时,进一步提高了动态过程中的经济性能。
71、进一步地,通过使用大m法将非线性模型转换为带线性约束的线性模型在保证逆变器跟踪准确性的同时,进一步提高了动态过程中的经济性能。
72、进一步地,将所述线性模型与线性约束进行整理,在保证了预测精度的同时,有效的降低了计算压力。
73、进一步地,设定稳定性约束不等式,以实现逆变器闭环有界稳定性,在保证了逆变器跟踪的准确性的同时,进一步提高了动态过程中的经济性能。
74、进一步地,构建k时刻稳定性约束下的优化问题,设置目标函数,以构成k时刻稳定性约束下的混合整数二次规划方程组,在保证了逆变器跟踪的准确性的同时,有效的提高了动态过程中的经济性能,将有界稳定条件进行推导,以实现逆变器闭环有界稳定性。
- 还没有人留言评论。精彩留言会获得点赞!