一种架空线行走机器人升降装置及方法与流程
本发明涉及机器人,尤其涉及一种架空线行走机器人升降装置及方法。
背景技术:
1、随着电网的要求升级,需要对架空线裸导线进行处理,例如清洁、包覆绝缘层、修复等工作。为了提高对架空线的处理效率,目前多采用机器人来实现,但是如何实现机器人在架空线上的上线成为了目前亟待解决的问题;
2、相关技术中,对于如何将架空线机器人放置在架空线上的处理方式,多采用人工的方式进行,例如通过施工人员攀爬电塔,然后再将可拆卸的行走轮拆卸后使得线缆穿过然后在固定行走轮的方式来实现;或者利用绞盘绝缘绳绳的方式,先将绝缘绳绳的一端固定在架空线上,然后转动绞盘使得绝缘绳绳收丝带动行走机器人上升,上升到位之后通过两个轮子相对靠近的方式实现将机器人架设在架空线上。
3、然而上述人工操作的方式存在安全隐患,机器人上线效率较低;而采用绝缘绳绳的方式,固定在架空线上的绝缘绳绳会影响机器人的行走,还需要将绝缘绳绳取下或者剪断,费时费力。
技术实现思路
1、鉴于以上技术问题中的至少一项,本发明提供了一种架空线行走机器人升降装置及方法,采用对升降机构的改进以实现架空线行走机器人的便捷升降及无障碍作业。
2、根据本发明的第一方面,提供一种架空线行走机器人升降装置,包括:
3、机器人本体,所述机器人本体上具有行走机构,所述行走机构用于机器人在架空线上移动;
4、升降机构,固定在所述机器人本体上,所述升降机构包括绝缘绳收放组件和挂线组件;
5、所述挂线组件竖直设置在所述机器人本体的两端上,所述挂线组件包括固定在所述机器人本体上的弹簧座,以及与所述弹簧座可分离设置的挂坠;
6、所述挂坠包括盖体和设置在所述盖体上的弹性管,所述盖体上具有贯穿的中心孔,所述弹性管一端固定在所述盖体的边沿位置处,另一端悬空设置,所述盖体还具有与所述弹性管连通的孔位;
7、其中,所述绝缘绳收放组件上的绝缘绳的自由端穿过所述中心孔并绕过架空线后穿入所述弹性管后固定在所述盖体上,所述绝缘绳收放组件收丝时,所述弹性管包绕在架空线上至所述挂坠与所述弹簧座接触,所述行走机构挂设在架空线上时,所述弹簧座将所述挂坠顶起,使得弹性管形成包绕架空线的闭合环形并且与架空线外壁具有间隙的结构。
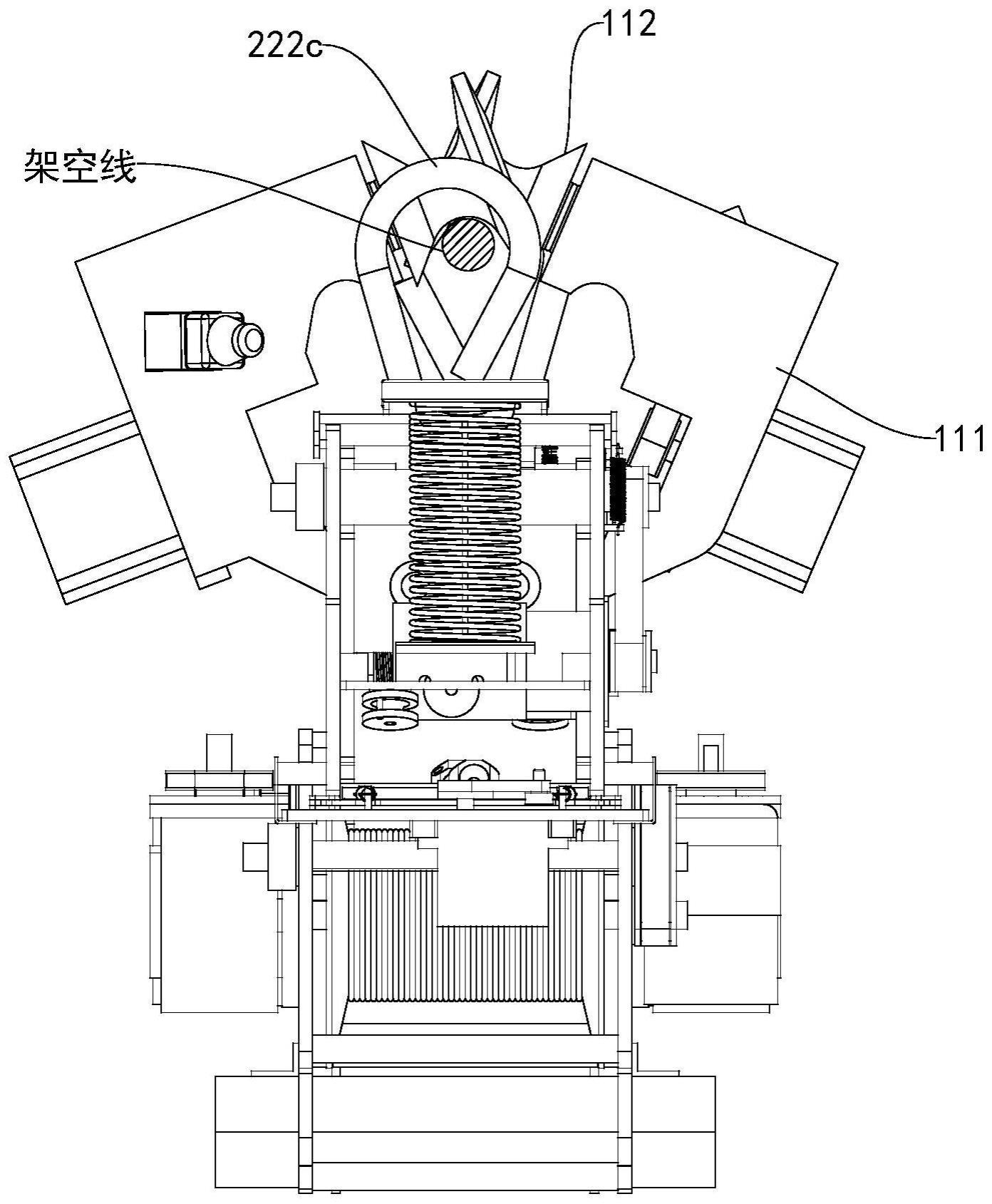
8、在本发明的一些实施例中,所述行走机构包括设置在所述机器人本体上的摆臂组件和设置在所述摆臂组件上的行走轮组件;
9、所述摆臂组件被配置为在该升降装置上升时打开,上升到位时闭合,以将所述行走轮组件挂设在架空线上;
10、所述行走轮组件被配置为当挂设在架空线上时,与架空线的接触点低于所述弹性管形成的闭合环形最高点的内壁。
11、在本发明的一些实施例中,所述机器人本体上还具有到位检测机构;
12、所述到位检测机构用于检测机器人本体上升至设定位置,当到达设定位置后,所述摆臂组件闭合。
13、在本发明的一些实施例中,所述到位检测机构包括横跨并且铰接在所述机器人本体上的摆框,所述摆框的自由端在初始状态时高于所述机器人本体的顶部设置;
14、还包括与所述摆框连接的复位弹簧,以及设置在所述摆框摆动方向底部的到位传感器。
15、在本发明的一些实施例中,所述摆臂组件包括两平行并且通过齿轮啮合的转轴、分别固定在两所述转轴上的摆箱以及设置在其中一个转轴上的蜗轮蜗杆驱动机构。
16、在本发明的一些实施例中,所述摆箱上还具有摄像组件,所述摄像组件朝向所述弹簧座的方向设置,用于观测所述弹性管与架空线的相对位置关系。
17、在本发明的一些实施例中,所述盖体底部具有半球形导向部,所述中心孔贯穿所述半球形导向部,所述半球形导向部的外径小于所述弹簧座的内径。
18、在本发明的一些实施例中,所述弹性管包括内层弹簧和外层编织层。
19、在本发明的一些实施例中,所述升降机构设置在所述行走机构两侧,且所述绝缘绳收放组件设置有两组,以单独控制对应的所述挂线组件。
20、根据本发明的第二方面,还提供了一种如第一方面中任一项所述的架空线行走机器人升降装置的升降方法,包括以下步骤:
21、释放绝缘绳收放组件上的绝缘绳,使得绝缘绳穿过弹簧座与挂坠的盖体上的中心孔,并将绝缘绳从顶部绕过待爬升的架空线;
22、将绕过架空线的绝缘绳继续穿入至弹性管内,并将绝缘绳的自由端固定在盖体上;
23、控制绝缘绳收放组件收丝,使得挂坠沿着绝缘绳线上升,至弹性管沿绝缘绳绕过架空线抵接在盖体上形成闭合环形结构;
24、继续控制绝缘绳收放组件收丝,使得机器人本体上升至设定高度;
25、闭合行走机构,使得行走机构挂设在架空线上,此时弹簧座与挂坠接触,使得弹性管与架空线之间具有间隙,实现行走机构在架空线上的无障碍移动,作业完成后反序操作以实现降落回收。
26、本发明的有益效果为:本发明通过在机器人本体上设置的绝缘绳收放组件和挂线组件,通过挂线组件中与弹簧座可分离设置的挂坠,在具体升降机器人本体时,绝缘绳穿过挂坠盖体上的中心孔绕过架空线以后穿回弹性管后固定在盖体上,使得绝缘绳收放组件在卷收绝缘绳时,随着绝缘绳线的收回,先将挂坠起吊至弹性管包绕架空线然后将机器人本体吊起上升,直至机器人的行走机构挂设在架空线上,行走机构挂设过程中弹簧座与挂坠接触,使弹性管形成的闭合结构与架空线不接触,从而不影响行走机构在架空线上的正常行走。通过上述设置,与现有技术相比,既提高了作业效率,又不用拆除绝缘绳绳,提高了架空线行走机器人升降的便捷性。
技术特征:
1.一种架空线行走机器人升降装置,其特征在于,包括:
2.根据权利要求1所述的架空线行走机器人升降装置,其特征在于,所述行走机构包括设置在所述机器人本体上的摆臂组件和设置在所述摆臂组件上的行走轮组件;
3.根据权利要求2所述的架空线行走机器人升降装置,其特征在于,所述机器人本体上还具有到位检测机构;
4.根据权利要求3所述的架空线行走机器人升降装置,其特征在于,所述到位检测机构包括横跨并且铰接在所述机器人本体上的摆框,所述摆框的自由端在初始状态时高于所述机器人本体的顶部设置;
5.根据权利要求2所述的架空线行走机器人升降装置,其特征在于,所述摆臂组件包括两平行并且通过齿轮啮合的转轴、分别固定在两所述转轴上的摆箱以及设置在其中一个转轴上的蜗轮蜗杆驱动机构。
6.根据权利要求5所述的架空线行走机器人升降装置,其特征在于,所述摆箱上还具有摄像组件,所述摄像组件朝向所述弹簧座的方向设置,用于观测所述弹性管与架空线的相对位置关系。
7.根据权利要求1所述的架空线行走机器人升降装置,其特征在于,所述盖体底部具有半球形导向部,所述中心孔贯穿所述半球形导向部,所述半球形导向部的外径小于所述弹簧座的内径。
8.根据权利要求1所述的架空线行走机器人升降装置,其特征在于,所述弹性管包括内层弹簧和外层编织层。
9.根据权利要求1所述的架空线行走机器人升降装置,其特征在于,所述升降机构设置在所述行走机构两侧,且所述绝缘绳收放组件设置有两组,以单独控制对应的所述挂线组件。
10.一种如权利要求1至9任一项所述的架空线行走机器人升降装置的升降方法,其特征在于,包括以下步骤:
技术总结
本发明涉及机器人技术领域,尤其涉及一种架空线行走机器人升降装置及方法,该装置包括机器人本体和升降机构,升降机构包括绝缘绳收放组件和挂线组件;挂线组件包括固定在机器人本体上的弹簧座,以及与弹簧座可分离设置的挂坠;挂坠包括盖体和设置在盖体上的弹性管,盖体上具有贯穿的中心孔,弹性管一端固定在盖体的边沿位置处;其中,绝缘绳收放组件上的绝缘绳的自由端穿过中心孔并绕过架空线后穿入弹性管后固定在盖体上,弹性管包绕在架空线上至挂坠与弹簧座接触,行走机构挂设在架空线上时,弹性管形成包绕架空线的闭合环形并且与架空线外壁具有间隙的结构。通过上述设置,既提高了上线的便捷性,又利用该间隙不影响机器人在架空线上的行走。
技术研发人员:丁坚强
受保护的技术使用者:江苏瑞禧智能电力科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!