考虑死区效应的永磁同步电机参数控制系统及控制方法
本发明涉及有永磁同步电机参数辨识,具体涉及一种考虑死区效应的永磁同步电机参数控制系统及控制方法。
背景技术:
1、永磁同步电机具有结构简单、功率密度高、效率高、可靠性高、体积小和重量轻等优点。结合不同的控制方法,可以满足高性能、高精度运动控制场合的要求。因此,永磁同步电机已经在越来越多的行业广泛应用。
2、传统的永磁同步电机电机的控制方法有矢量控制、直接转矩控制、智能控制等众多控制策略,常用控制方法都需要根据准确的数学模型来实现,因此在线获得电机的实时参数对高性能电机控制系统尤为重要。但是,由于逆变器非线性因素,使逆变器电流波形畸变,导致电机输出转矩脉动,对永磁同步电机的控制效果产生不良影响,产生调速范围减小的后果,限制了永磁同步电机的应用场景。传统的考虑死区效应的永磁同步电机参数辨识系统在原有电路的基础上注入扰动电流,解决电压方程欠秩问题,在补偿死区效应带来的误差的同时,带来了新的扰动误差,仍有不足。所以,需要在考虑死区效应的基础上避免引入新的扰动因素,避免因电流畸变出现的振动、噪声等现象。
技术实现思路
1、本发明提供了一种考虑死区效应的永磁同步电机参数控制系统及控制方法,以解决电压源型空间矢量脉宽调制逆变器死区效应引起的输出电压、电流波形畸变和转矩脉动,导致电机控制性能下降、出现振动、噪声的问题。
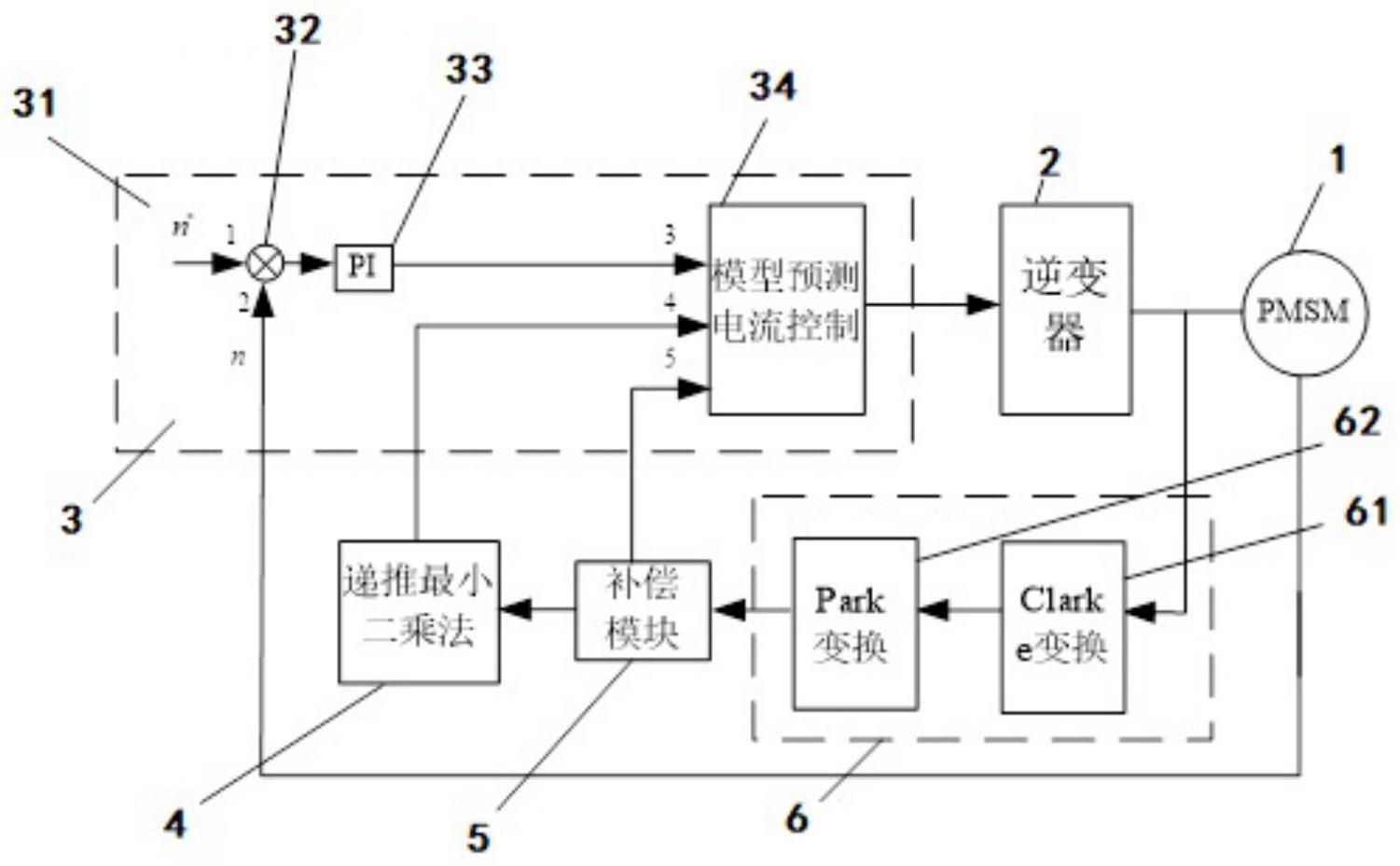
2、本发明提供了一种考虑死区效应的永磁同步电机参数控制系统,包括:电机、逆变器、电流控制模块、参数辨识模块、补偿模块、坐标变换模块;
3、电机与电流控制模块的输入端连接;
4、电流控制模块的输出端与逆变器输入端连接,电流控制模块从电机获取实际角速度信号根据模型预测电流控制方法产生换相信号;
5、逆变器的输出端分别与电机、坐标变换模块的输入端连接,逆变器用于将输入的换相信号转换为坐标变换模块需要的输入信号以及控制电机的控制信号;
6、坐标变换模块的输出端分别与参数辨识模块的输入端、补偿模块的输入端连接,坐标变换模块通过坐标变换为参数辨识模块和补偿模块提供输入信号;
7、补偿模块的输出端与电流控制模块的输入端连接,补偿模块用于补偿来自坐标变换模块的信号;
8、参数辨识模块的输出端与电流控制模块的输入端连接,参数辨识模块用于根据两相静止坐标系横轴电压和两相静止坐标系纵轴电压通过递推最小二乘法得到电机参数。
9、可选地,坐标变换模块包括:clark变换单元和park变换单元;
10、逆变器的输出端与clark变换单元的输入端连接,clark变换单元用于根据自然坐标系的三相电流通过clark变换得到静止坐标系的两相电压;
11、clark变换单元的输出端与park变换单元的输入端连接,park变换单元用于根据静止坐标系的两相电压通过park变换得到旋转坐标系的两相电压。
12、可选地,电流控制模块包括:角速度设定单元、减法器单元、pi调节单元和模型预测电流控制单元;
13、角速度设定单元的输出端与减法器单元的一个输入端连接,角速度设定单元用于提供给定角速度信号;
14、电机与减法器单元的另一个输入端连接;
15、减法器单元的输出端与pi调节单元的输入端连接,减法器单元用于通过对给定角速度信号和电机的实时角速度信号作差,得到角速度差信号;
16、pi调节单元的输出端与模型预测电流控制单元的第三输入端连接,pi调节单元用于根据角速度差信号通过pid调节,得到交轴电压信号和直轴电压信号;
17、模型预测电流控制单元的输出端与逆变器的输入端连接,模型预测电流控制单元用于根据交轴电压信号、直轴电压信号、定子电阻、转子电感、磁链、补偿完成后两相静止坐标系横轴电压和两相静止坐标系纵轴电压通过模型预测电流控制,获得换相信号。
18、本发明还提供了一种考虑死区效应的永磁同步电机参数控制方法,适用于所述考虑死区效应的永磁同步电机参数控制系统,包括如下步骤:
19、步骤1:获取永磁同步电机的a、b两相电流信号,通过总线编码器获得机械转速和速度反馈值;
20、步骤2:将a、b两相电流信号、机械转速进行坐标变换,得到两相静止坐标系横轴电压和两相静止坐标系纵轴电压;
21、步骤3:通过电压补偿法对两相静止坐标系横轴电压和两相静止坐标系纵轴电压进行补偿;
22、步骤4:根据两相静止坐标系横轴电压和两相静止坐标系纵轴电压,获得定子电阻、转子电感和磁链;
23、步骤5:根据定子电阻、转子电感和磁链通过模型预测电流控制法获得换相信号;
24、步骤6:根据步骤4获得的定子电阻、转子电感和磁链、步骤5获得的换相信号对电机进行控制,完成闭环控制过程。
25、可选地,所述步骤3的电压补偿方法包括如下步骤:
26、s31:根据死区时间、开关管开通时间和开关管关断时间,获得实际输出脉冲宽度与理想输出脉冲宽度的时间差;
27、s32:根据实际输出脉冲宽度与理想输出脉冲宽度的时间差,通过标准补偿电压矢量幅值法,获得标准补偿电压矢量幅值;
28、s33:获取电机转子转动角度,经过计算得到电流矢量角度,通过电流极性判断法获得电流极性;
29、s34:根据电流极性与补偿电压对应关系,获得补偿电压相对于标准补偿电压矢量幅值的差值,计算补偿电压;
30、s35:根据补偿电压,对两相静止坐标系横轴电压和两相静止坐标系纵轴电压进行补偿。
31、可选地,所述s31的实际输出脉冲宽度与理想输出脉冲宽度的时间差的具体计算方法为:
32、ter=td+ton-toff
33、其中,ter为实际输出脉冲宽度与理想输出脉冲宽度的时间差,td为死区时间,ton为开关管开通时间,toff为开关管关断时间。
34、可选地,所述s32的标准补偿电压矢量幅值法的具体计算方法为:
35、
36、其中,v为标准补偿电压矢量幅值,udc为母线电压,ter为实际输出脉冲宽度与理想输出脉冲宽度的时间差,t为载波频率。
37、可选地,所述s33的电流矢量角度的具体计算方法为:
38、
39、其中,θ为电流矢量角度,为电机转子转动角度。
40、可选地,所述s33的电流极性判断法的具体判断方法为:
41、当电流矢量角度θ在(0°,30°)或(330°,360°)区间内时,三相电流ia、ib、ic的极性分别为正、负、负;
42、当电流矢量角度θ在(30°,90°)区间内时,三相电流ia、ib、ic的极性分别为正、正、负;
43、当电流矢量角度θ在(90°,150°)区间内时,三相电流ia、ib、ic的极性分别为正、正、负;
44、当电流矢量角度θ在(150°,210°)区间内时,三相电流ia、ib、ic的极性分别为负、正、正;
45、当电流矢量角度θ在(210°,270°)区间内时,三相电流ia、ib、ic的极性分别为负、负、正;
46、当电流矢量角度θ在(270°,330°)区间内时,三相电流ia、ib、ic的极性分别为正、负、正;
47、其中,ia、ib、ic分别为a相、b相、c相电流。
48、可选地,所述s34的电流极性与补偿电压对应关系的具体对应关系为:
49、当三相电流ia、ib、ic的极性分别为正、负、负时,补偿电压uαc的幅值为v,补偿电压uβc的幅值为0;
50、当三相电流ia、ib、ic的极性分别为正、正、负时,补偿电压uαc的幅值为补偿电压uβc的幅值为
51、当三相电流ia、ib、ic的极性分别为负、正、负时,补偿电压uαc的幅值为补偿电压uβc的幅值为
52、当三相电流ia、ib、ic的极性分别为负、正、正、时,补偿电压uαc的幅值为-v,补偿电压uβc的幅值为0;
53、当三相电流ia、ib、ic的极性分别为负、负、正时,补偿电压uαc的幅值为补偿电压uβc的幅值为
54、当三相电流ia、ib、ic的极性分别为正、负、正时,补偿电压uαc的幅值为补偿电压uβc的幅值为
55、其中,ia、ib、ic分别为a相、b相、c相电流,v为标准补偿电压矢量幅值。
56、可选地,所述s35的电压补偿方法的具体计算公式为:
57、uα=uα*+uαc
58、uβ=uβ*+uβc
59、其中,uα、uβ为补偿完成后两相静止坐标系横轴电压和两相静止坐标系纵轴电压,uα*、uβ*为补偿前两相静止坐标系横轴电压和两相静止坐标系纵轴电压,uαc、uβc为补偿电压。
60、本发明至少包括以下有益效果:
61、1、本发明仅利用永磁同步电机控制过程中原有的电流、电压值,在不改变原有的硬件电路、不增加计算量、不占用系统资源的基础上,实现对逆变器死区效应的补偿;与传统补偿方法相比,不仅有更强的可操作性和精确度,而且成本低廉。
62、2、本发明在控制方法中,首先获取当前的电流矢量角度,再判断电流极性,根据极性不同选择幅值不同的补偿电压,查表法在保证精确度的基础上,大大降低了补偿模块的运行步骤和时间,结合模型预测电流控制在每个控制周期内进行一次补偿,实现了闭环调节、实时调节和自适应调节。
63、3、本发明通过应用电压补偿方法,解除了永磁同步电机低转速时易受限制、出现电磁转矩低频脉动的问题,避免低速运行过程中出现电机抖动、噪音等现象,提高了控制精度。
- 还没有人留言评论。精彩留言会获得点赞!