一种基于磁悬浮平面电机的隔振平台及其控制方法
本发明属于电机领域,具体涉及一种基于磁悬浮平面电机的隔振平台及其控制方法。
背景技术:
1、随着近地轨道航天器所携带的精密载荷对超静环境的要求日益严苛,空间高性能振动抑制问题己成为国家航天工程中制约精密空间任务开展的关键短板。磁悬浮平面电机可实现六自由度运动,能够有效地抑制振动。
2、磁悬浮工作台的驱动部件是磁悬浮平面电机,磁悬浮平面电机按照动子和定子结构分类可分为两类:动圈式磁悬浮平面电机和动磁式磁悬浮平面电机。动圈式磁悬浮平面电机的动子为励磁线圈,因此动子的供电电缆会给电机控制引入额外的扰动,也限制了电机的行程和电机动子的运动自由度。而动磁式磁悬浮平面电机的动子为永磁体,可以沿着x、y、z方向运动及绕x、y、z轴旋转(即悬浮式六自由度运动),且与外界无接触运动,无需润滑没有磨损。电机采用电磁悬浮而非气浮的方式,因而适应真空环境。
技术实现思路
1、本发明的目的在于提供一种基于磁悬浮平面电机的隔振平台及其控制方法,解决空间振动的隔离与抑制问题,使有效载荷处于超静状态。
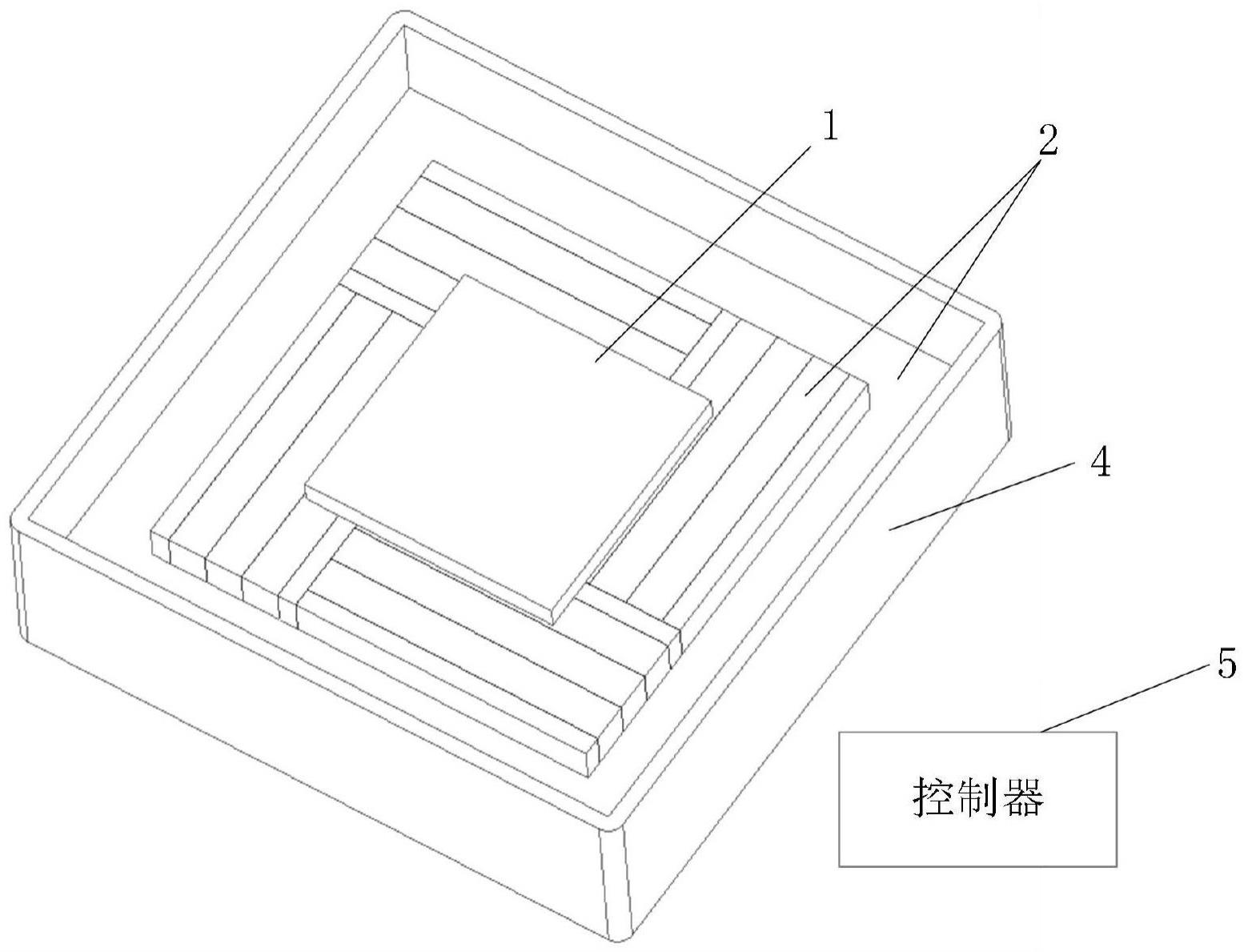
2、实现本发明目的的技术解决方案为:一种基于磁悬浮平面电机的隔振平台,包括载荷、平面电机、传感器、基座、控制器;基座为顶部开口的方形盒体,用于放置载荷、平面电机和传感器,传感器和定子固定于基座内;平面电机包括动子和其下设置的定子;动子由四组halbach永磁体阵列组成,与定子之间存在能够调节的气隙;定子由单层或多层印制电路板组成,其上从上至下印制有沿x方向的励磁导线和沿y方向的励磁导线,两者相互层叠;传感器位于定子底面,用于动子位置姿态检测;载荷置于平面电机的动子的顶面中心;控制器采用pi控制和电流模型预测控制相结合的双闭环控制策略,包括控制模块和功率模块;其中控制模块包括fpga主控芯片、电流采样电路、位置采样及编码电路;功率模块采用由场效应管和反向二极管构成的两电平三相逆变桥。
3、一种基于磁悬浮平面电机的隔振平台的控制方法,步骤如下:
4、步骤一:将两层霍尔传感器阵列板采集得到的24路24位开关信号输送给24位编码器,得到24组16进制的数字信号。
5、步骤二:将24组16进制的数字信号传递给fpga主控芯片进行位置解算,得到动子相对于定子的具体位置(x,y,θ,h),并计算出(x,y,θ,h)与参考位置(x*,y*,θ*,h*)之间的位置偏移量(△x,△y,△θ,△h);其中,x表示横坐标,y表示纵坐标,θ表示旋转角度,h表示悬浮高度。
6、步骤三:对动子的位置偏移量(△x,△y,△θ,△h)进行pi控制调节,经过调节之后输出x方向、x方向定子的给定三相电流。
7、步骤四:对x方向、y方向定子的给定三相电流和x方向、y方向定子的反馈三相电流分别进行电流模型预测控制,在磁悬浮平面电机预测模型的基础上采用无差拍控制,在包括8个三相桥开关状态的有限集中寻找到最优的一组开关状态作为pwm信号,最终输入到三相逆变桥中,实现对动子位置的精确控制,使有效载荷处于超静状态。
8、本发明与现有技术相比,其显著优点:
9、(1)能够适应真空环境。
10、(2)控制器件减少,在保证隔振平台的隔振效果的同时,简化了系统的结构,降低了系统的体积与成本,能够实现小型化、集成化、轻质量。
11、(3)适应复杂工况,实现变负载情况下的隔振问题。
12、(4)省去了动子与基座之间的线缆,与外界无电气连接,能够真正实现与外界无接触运动,简化了系统模型与控制,线性度较好,能够提高性能和精度。
13、(5)动子的运动范围和行程更加容易扩展,有效行程大。
14、(6)能有效隔离低频扰动,动态响应速度快。
15、(7)隔振平台动子的位姿解算速度更快。
16、(8)在复杂环境下,传感器的稳定性更强,隔振平台控制精度更高。
17、(9)采用模型预测控制,使得控制系统结构更简单,系统响应速度更快。
技术特征:
1.一种基于磁悬浮平面电机的隔振平台,其特征在于:包括载荷(1)、平面电机(2)、传感器(3)、基座(4)、控制器(5);基座(4)为顶部开口的方形盒体,用于放置载荷(1)、平面电机(2)和传感器(3),传感器(3)和定子(7)固定于基座(4)内;平面电机(2)包括动子(6)和其下设置的定子(7);动子(6)由四组halbach永磁体阵列(8)组成,与定子(7)之间存在能够调节的气隙(9);定子(7)由单层或多层印制电路板组成,其上从上至下印制有沿x方向的励磁导线(7-1)和沿y方向的励磁导线(7-2),两者相互层叠;传感器(3)位于定子(7)底面,用于动子(6)位置姿态检测;载荷(1)置于平面电机(2)的动子(6)的顶面中心;控制器(5)采用pi控制和电流模型预测控制相结合的双闭环控制策略,包括控制模块和功率模块;其中控制模块包括fpga主控芯片、电流采样电路、位置采样及编码电路;功率模块采用由场效应管和反向二极管构成的两电平三相逆变桥。
2.根据权利要求1所述的基于磁悬浮平面电机的隔振平台,其特征在于:动子(6)由四组halbach永磁阵列(8)两两垂直首尾相接而成,其上搭载载荷(1)。
3.根据权利要求1所述的基于磁悬浮平面电机的隔振平台,其特征在于:在每组halbach永磁阵列(8)中,相邻两块永磁体充磁方向互相垂直,永磁体充磁方向按照顺时针方向依次旋转90°。
4.根据权利要求1所述的基于磁悬浮平面电机的隔振平台,其特征在于:印制电路板上位于同一电路层上的励磁导线,一侧按照三相或四相方式相接,另一侧与下一层的同相励磁导线相接构成线圈回路。
5.根据权利要求1所述的基于磁悬浮平面电机的隔振平台,其特征在于:传感器(3)由两层分别印制在电路板上的霍尔传感器阵列板构成,每层霍尔传感器阵列板包括若干个以等间距均匀分布的开关型霍尔传感器(10),两层霍尔传感器阵列板之间的霍尔传感器交错间隔分布,共采集24路信号,用于检测电机动子(6)的位置,当隔振平台处于工作状态时,需要实时获取动子(6)相对于定子(7)的位置信息,为控制提供反馈输入,以避免发生碰撞。
6.一种基于磁悬浮平面电机的隔振平台的控制方法,其特征在于,步骤如下:
技术总结
本发明公开了一种基于磁悬浮平面电机的隔振平台及其控制方法,包括载荷、平面电机、传感器、基座、控制器;平面电机由动子和定子组成,动子包括四组Halbach阵列,由若干块不同充磁方向的永磁体按一定规律排列而成;定子采用印制电路板。传感器采用开关型霍尔传感器。控制器采用PI控制和电流模型预测控制(MPCC,Model Predictive Current Control)相结合的双闭环控制策略。平台工作时,通过传感器获得动子的位姿信息,调整励磁电流来控制动子受力情况,达到隔振目的。本发明简化了隔振平台的结构,成本低,易控制,能够适应复杂工况,有效提高电机经济运行范围。
技术研发人员:颜建虎,苏彬如,衡培然,池松
受保护的技术使用者:南京理工大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!