一种碰撞检测的精度高的伺服马达控制装置及方法与流程
本发明涉及伺服马达控制,具体为一种碰撞检测的精度高的伺服马达控制装置及方法。
背景技术:
1、伺服电机可以控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出,分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
2、伺服系统是使物体的位置、方位、状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统,伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm,直流伺服电机分为有刷和无刷电机,有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护不方便(换碳刷),产生电磁干扰,对环境有要求。因此它可以用于对成本敏感的普通工业和民用场合。
3、伺服电机属于现在普遍使用的一种驱动装置,但是,伺服电机在运行的过程中组件之间可能出现撞击,同时可能受到外部的撞击,这样需要一种可以检测伺服马达在受到碰撞的情况,因此,亟待一种改进的技术来解决现有技术中所存在的这一问题。
技术实现思路
1、本发明的目的在于提供一种可以实现对马达的精准、高效的检测,并且通过实时检测对马达进行控制的碰撞检测的精度高的伺服马达控制装置及方法,以解决上述背景技术中提出的问题。
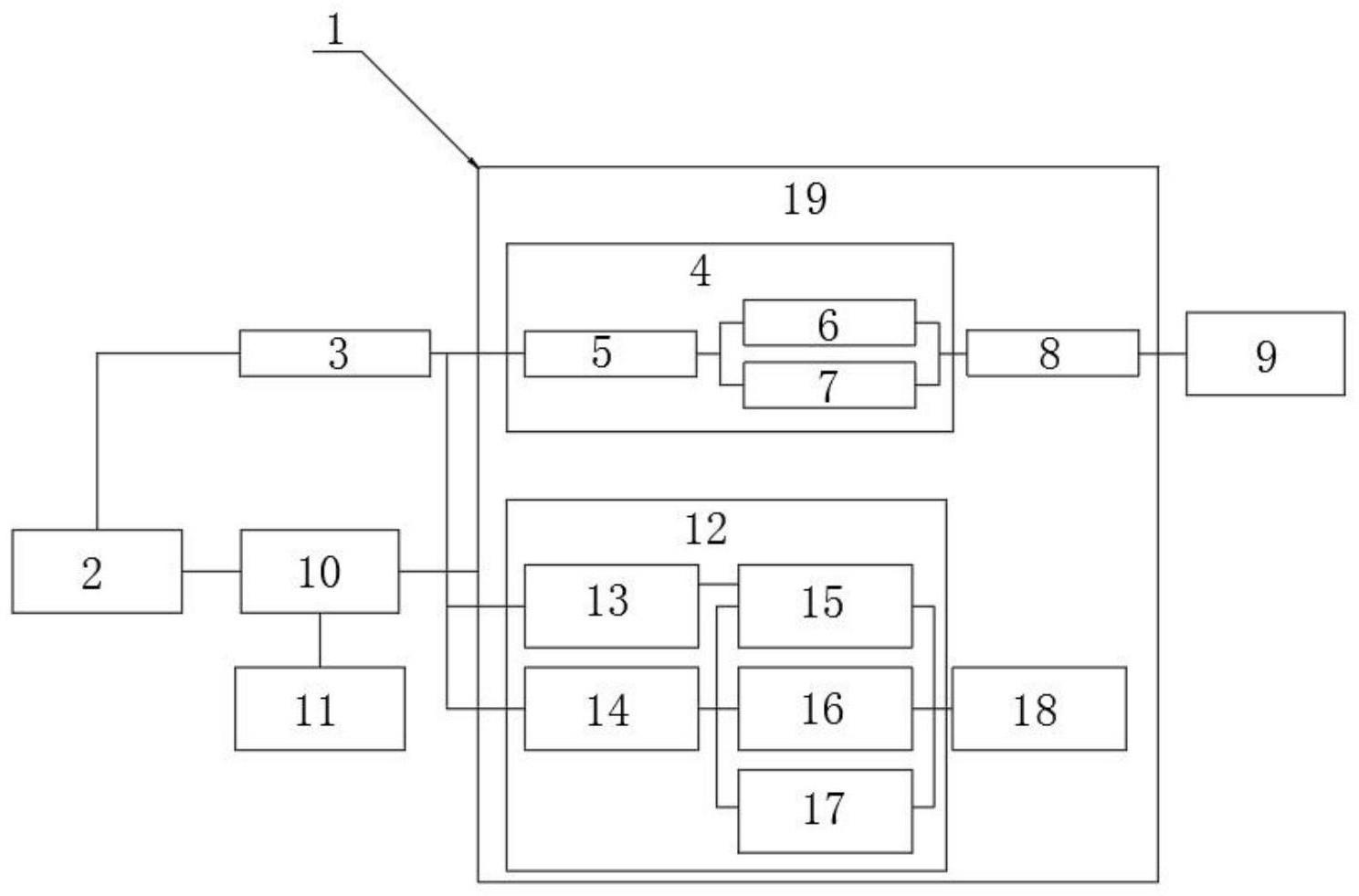
2、为实现上述目的,本发明提供如下技术方案:一种碰撞检测的精度高的伺服马达控制装置,包括马达控制装置本体,所述马达控制装置本体上设有主控制机,主控制机的一连接端设有数据收发模块a,数据收发模块a的另一连接端设有马达控制机构,所述马达控制机构上包括马达检测机构、马达动作机构;
3、所述马达检测机构上设有维度检测器,维度检测器的一连接端设有电压检测器、电流检测器,所述电压检测器、电流检测器相互并联,所述电压检测器、电流检测器的另一连接端设有碰撞检测,碰撞检测的另一连接端设有数据收发模块a;
4、所述马达动作机构上设有单片机,单片机的一连接端设有转向控制器、转速控制器、稳压模块,所述转向控制器、转速控制器、稳压模块相互并联,所述转向控制器、转速控制器、稳压模块的另一连接端设有驱动模块,转向控制器、转速控制器、稳压模块均与驱动模块连接。
5、优选的,所述数据收发模块a得以连接端设有存储模块,存储模块包括固定硬盘存储、云存储。
6、优选的,所述维度检测器的一连接端设有位置检测器,位置检测器的另一连接端设有主控制机。
7、优选的,所述转向控制器的一连接端设有切换模块,切换模块的另一连接端与数据收发模块a的一端连接,数据收发模块a的另一端设有伺服马达检测数据输出机构,伺服马达检测数据输出机构上包括撞击力大小、撞击的时间间隔、撞击的位置控制模块。
8、优选的,所述碰撞检测上包括计时模块、位置传感器以及震动传感器。
9、优选的,所述位置检测器上设有230ω电阻r1、110ω电阻r2,230ω电阻r1与110ω电阻r2串联,230ω电阻r1的一连接端接入vcc端,110ω电阻r2的一连接端接地,所述230ω电阻r1与110ω电阻r2之间的节点处与运算放大器t1的反向输入端连接,230ω电阻r1与110ω电阻r2之间的节点处设有5μf电容c1,5μf电容c1的负极接地,所述运算放大器t1的同相输出端与运算放大器t1的输出端之间设有5μf电容c4、30ω电阻r3,所述5μf电容c4与30ω电阻r3相互并联,所述运算放大器t1的输出端设有6pf电容c2,6pf电容c2的负极与40ω电阻r6的一端连接,所述6pf电容c2与40ω电阻r6之间的节点处设有100ω电阻r4、110ω电阻r5,100ω电阻r4与110ω电阻r5串联,所述110ω电阻r5的另一连接端接地,所述40ω电阻r6的一连接端与运算放大器t2的同相输出端连接,运算放大器t2的反相输入端接地,运算放大器t2的同相输出端与输出端之间设有16pf电容c3、100ω电阻r7,16pf电容c3与100ω电阻r7相互并联,所述运算放大器t2的输出端设有190ω电阻r8。
10、优选的,所述数据收发模块a上设有1kω电阻r10,1kω电阻r10的一端与txd连接,1kω电阻r10的另一连接端设与三极管npn1的基极连接,三极管npn1的集电极设有230ω电阻r18,230ω电阻r18的另一连接端接地,所述三极管npn1的发射极接入3v电压,所述1kω电阻r10与三极管npn1基极之间的节点设有10kω电阻r9,10kω电阻r9的另一连接端与三极管npn1的发射极连接,三极管npn1与1kω电阻r10之间的节点处设有2kω电阻r11,2kω电阻r11的另一连接端设有模块d1,模块d1上的ro连接端设有100ω电阻r13,100ω电阻r13的另一连接端设有2kω电阻r12,100pf电容c5,所述2kω电阻r12的另一连接端接入3v电压,100pf电容c5的负极接地,所述模块d1的di端口与b连接端之间设有5.1kω电阻r15,模块d1的vcc端接入3v电压,模块d1的a连接端设有5.1kω电阻r14,所述模块d1的gnd连接端接地。
11、优选的,所述切换模块上设有模块p1,模块p1的一连接端接入-7v电压,模块p1的李明义连接端与三极管npn2的集电极连接,所述模块p1的两个连接端之间设有二极管l1,三极管npn2的基极设有230ω电阻r16,所述三极管npn2的基极与三极管npn2的发射极之间设有230ω电阻r17,三极管npn2的发射极接入5v电压,所述三极管npn2的集电极与p1模块之间的节点处设有模块p2,模块p2的另一连接端接入-7v电压,所述模块p2的两个连接端之间设有二极管l2,所述模块p1、模块p2分别与三级开关配合连接。
12、优选的,一种碰撞检测的精度高的伺服马达控制装置的控制方法包括以下步骤:
13、步骤一、伺服马达受到的外部碰撞以及伺服马达内部受到的碰撞后数据收发器接收到碰撞数据后将接收的数据发送至碰撞检测,碰撞检测对数据进行初步检测;
14、步骤二、初步检测的受到碰撞后的伺服马达的电流数值以及电压数值,碰撞后变化的电流数值以及电压数值发送至维度检测器,维度检测器对变化的电流数值以及电压数值建立空间位置,位置检测器根据空间维度判断碰撞的位置;
15、步骤三、位置检测器将检测到的数据发送至数据收发模块a,数据收发模块a将检测到的数据进行备份存储,单片机将检测后变化的数据进行读取并判断,通过对数据的判断后做出判断后的数据输出,转向控制器、转速控制器对伺服马达进行调节。
16、与现有技术相比,本发明的有益效果是:
17、(1)碰撞检测上包括计时模块、位置传感器以及震动传感器,通过碰撞检测上的位置传感器以及震动传感器准确的判断出震动、撞击的部位,计时模块记录每一次碰撞的具体的时间;
18、(2)马达动作机构对采集的数据进行判断后做出相应的调整,实现对伺服马达的及时调控;
19、(3)位置检测器通过实时对系统上的电流进行检测,通过变化的电流来做出精准、高效的判断;
20、(4)该马达控制装置可以实现对马达的精准、高效的检测,并且通过实时检测对马达进行控制。
- 还没有人留言评论。精彩留言会获得点赞!