一种基于抗偏移磁耦合机构的变电站巡检机器人动态无线充电系统
本发明涉及无线电能传输,具体涉及一种基于抗偏移磁耦合机构的变电站巡检机器人动态无线充电技术。
背景技术:
1、近年来,我国变电站建设规模不断扩大,在保证了电力系统正常运行的同时,也增加了变电站运行维护人员的工作任务量。变电站巡检机器人的出现,一方面减轻了运行维护人员的工作量,另一方面将人工巡检变为机器巡检,提高了巡检工作的效率和准确性。目前,绝大多数变电站巡检机器人采用接触式插电充电方式,这种传统的充电方式因为充电插头频繁地插拔易导致其变形进而引发安全事故,且其需要人工维护,难以实现彻底的智能化和无人化。同时这种方式使得巡检机器人续航里程不足,需要频繁充电,对电池依赖较高。无线充电作为近些年的一项新兴技术,通过磁耦合线圈将供电侧的电能转变为磁能再转变为受电侧电能,避免了供电侧和受电侧的直接接触,相较于传统的插拔充电方法,具有环境污染小,环境适应性强等优点。
2、综合考虑并有效解决损耗问题、稳定性、系统功率传输能力等问题,本发明旨在提出一种新型框架式的设计思路和系统,便于变电站巡检机器人分段式动态无线充电系统设计、应用和优化。
技术实现思路
1、为克服现有技术的不足,本发明提出了一种基于抗偏移磁耦合机构的变电站巡检机器人动态无线充电系统。
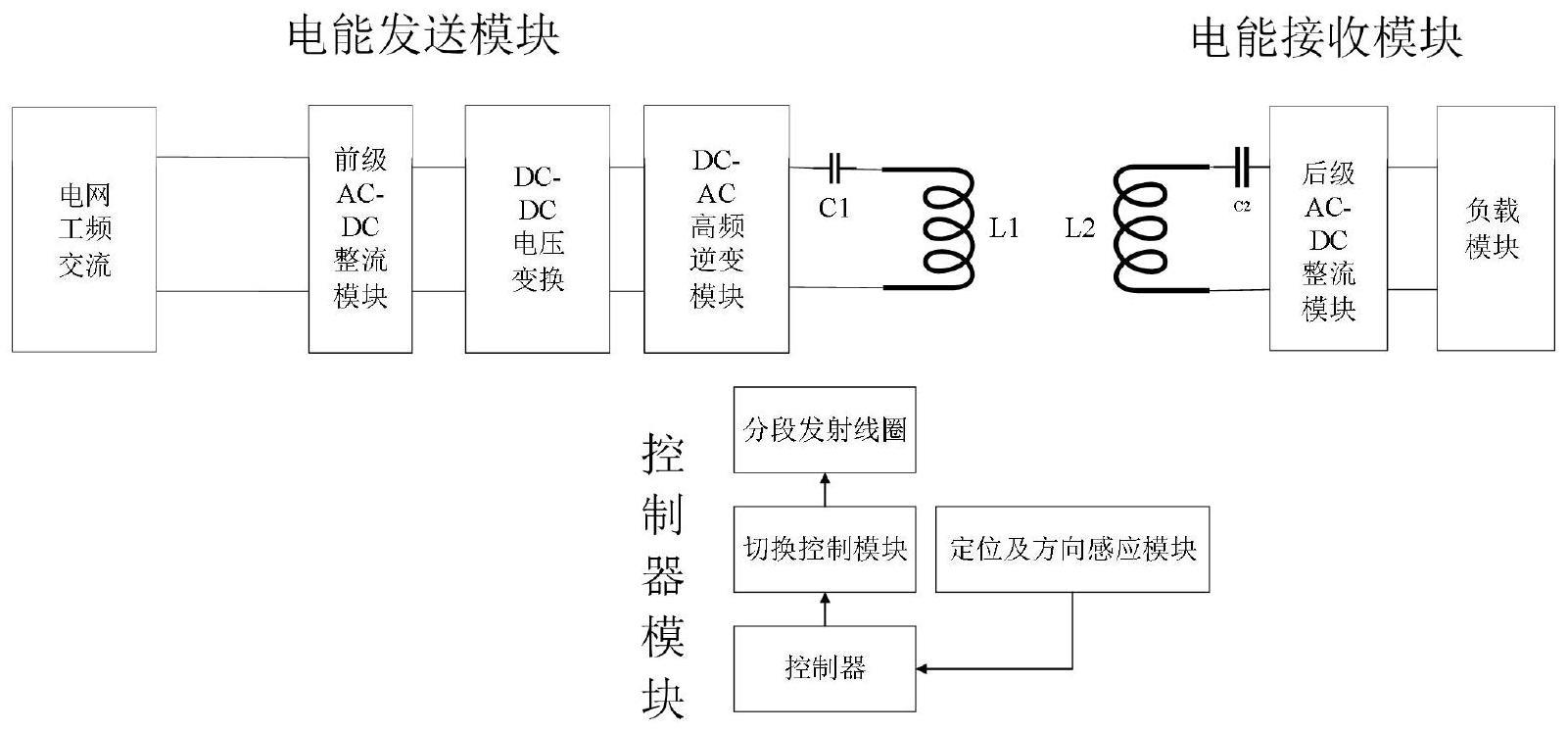
2、为实现上述目的,本发明具体产品包括六个模块,磁耦合机构模块、逆变器模块、整流桥模块、控制器模块、定位模块、切换控制模块。
3、进一步地,所述磁耦合机构采用初级侧lcc补偿拓扑——次级侧串联补偿拓扑的无线电能传输系统,初级侧采用电容cp、电容cf1和电感lf1组成lcc补偿结构,在聂依曼互感计算公式的基础上进一步细化数值计算的过程,采用坐标化非同轴矩形平面螺旋线圈互感计算方法,推导得非同轴矩形平面螺旋线圈之间的互感大小可表示为
4、
5、通过改变接收线圈的中心坐标,得到线圈中心线非同轴情形下的矩形平面螺旋线圈互感随接收线圈位置变化的特性。
6、进一步地,所述逆变器模块采用高频逆变器,将直流输入转换为高频交流输出,再经过补偿电路环节后为初级侧发射线圈提供高频激励。
7、进一步地,所述整流桥模块将电网输出的工频交流电整流后变为直流电,再经过直流电压变换器后得到所需的直流高压。
8、进一步地,所述控制器模块在依赖定位模块获取机器人的具体位置之后,接收控制信号,采用切换控制装置及相应的切换控制策略控制线圈阵列中各独立线圈进行有序地通电,使仅与接收线圈位置相关的少量短分段发射线圈处于通电状态,其他分段发射线圈无需处在通电状态,极大地减少在短分段系统中发射装置的损耗。
9、进一步地,所述定位模块采用红外检测方案的双传感器负载移动特性感知定位策略,当变电站巡检机器人经过相邻两发射线圈中间位置时,该系统需要实行切换控制,即断开前一个分段发射线圈与电源的连接,将下一个分段发射线圈接通电源,因此,需对负载进行定位分析,当巡检机器人运动至红外传感器位置时,机器人红外传感器被遮挡,传感器输出信号发生变化,可由此确定机器人位置,对其进行定位研究;为保证对短分段能量发射线圈的精确通电、断电,需对负载进行移动特性感知,在两短分段发射线圈间安装两块红外传感器,当负载移动至该位置对红外传感器造成遮挡时,以输出信号变化的先后判断负载移动方向,设某相邻短分段能量发射线圈之间安装有红外传感器a、红外传感器b,若a较b的输出信号先发生变化,则负载移动方向为从a至b,反之则为从b至a,根据机器人位置以及移动方向,其所在移动方向下一线圈通电,上一线圈断电,据此控制流程可实现只有巡检机器人所在短分段线圈通电,其余线圈断电的功能。
10、进一步地,所述切换控制模块主要包括红外感应模块、继电器控制模块,为了对系统参数进行实时精确测量,实验中还包括示波器、阻抗分析仪等,在能量拾取机构运动过程中,当能量拾取机构中心映射到x轴上的位置与切换标志点重合时,前一个分段发射线圈与电源的连接断开,下一个分段发射线圈接通电源,可以实现巡检机器人在行驶过程中进行动态不间断无线供电;两短分段发射线圈间安装两块红外传感器,当机器人运动至切换点位置时,红外传感器、生变化的先后,判断机器人行驶方向,由继电器模块控制下一线圈通电、上一线圈断电。
技术特征:
1.一种基于抗偏移磁耦合机构的变电站巡检机器人动态无线充电系统,其特征在于,该系统包括设置于变电站中的电源发送端和设置于巡检机器人中的机器人电能接收模块,共包括磁耦合机构、逆变器、整流桥、控制器、定位模块、切换控制模块等关键部分在内的系统子模块。
2.根据权利要求1所述的一种基于抗偏移磁耦合机构的变电站巡检机器人动态无线充电系统,其特征在于:所述磁耦合机构采用初级侧lcc补偿拓扑——次级侧串联补偿拓扑的无线电能传输系统,初级侧采用电容cp、电容cf1和电感lf1组成lcc补偿结构,在聂依曼互感计算公式的基础上进一步细化数值计算的过程,采用坐标化非同轴矩形平面螺旋线圈互感计算方法,推导得非同轴矩形平面螺旋线圈之间的互感大小可表示为
3.根据权利要求1所述的一种基于抗偏移磁耦合机构的变电站巡检机器人动态无线充电系统,其特征在于:所述逆变器模块采用高频逆变器,将直流输入转换为高频交流输出,再经过补偿电路环节后为初级侧发射线圈提供高频激励。
4.根据权利要求1所述的一种基于抗偏移磁耦合机构的变电站巡检机器人动态无线充电系统,其特征在于:所述整流桥模块将电网输出的工频交流电整流后变为直流电,再经过直流电压变换器后得到所需的直流高压。
5.根据权利要求1所述的一种基于抗偏移磁耦合机构的变电站巡检机器人动态无线充电系统,其特征在于:所述控制器模块在依赖定位模块获取机器人的具体位置之后,接收控制信号,采用切换控制装置及相应的切换控制策略控制线圈阵列中各独立线圈进行有序地通电,使仅与接收线圈位置相关的少量短分段发射线圈处于通电状态,其他分段发射线圈无需处在通电状态,极大地减少在短分段系统中发射装置的损耗。
6.根据权利要求1所述的一种基于抗偏移磁耦合机构的变电站巡检机器人动态无线充电系统,其特征在于:所述定位模块采用红外检测方案的双传感器负载移动特性感知定位策略,当变电站巡检机器人经过相邻两发射线圈中间位置时,该系统需要实行切换控制,即断开前一个分段发射线圈与电源的连接,将下一个分段发射线圈接通电源,因此,需对负载进行定位分析,当巡检机器人运动至红外传感器位置时,机器人红外传感器被遮挡,传感器输出信号发生变化,可由此确定机器人位置,对其进行定位研究;为保证对短分段能量发射线圈的精确通电、断电,需对负载进行移动特性感知,在两短分段发射线圈间安装两块红外传感器,当负载移动至该位置对红外传感器造成遮挡时,以输出信号变化的先后判断负载移动方向。
7.根据权利要求1所述的一种基于抗偏移磁耦合机构的变电站巡检机器人动态无线充电系统,其特征在于:所述切换控制模块主要包括红外感应模块、继电器控制模块,在能量拾取机构运动过程中,当能量拾取机构中心映射到x轴上的位置与切换标志点重合时,前一个分段发射线圈与电源的连接断开,下一个分段发射线圈接通电源,可以实现巡检机器人在行驶过程中进行动态不间断无线供电;两短分段发射线圈间安装两块红外传感器,当机器人运动至切换点位置时,红外传感器被遮挡,输出信号发生变化,此时可对机器人进行定位。接着,根据两个传感器输出信号发生变化的先后,判断机器人行驶方向,由继电器模块控制下一线圈通电、上一线圈断电。
技术总结
发明名称一种基于抗偏移磁耦合机构的变电站巡检机器人动态无线充电系统摘要本发明公开了一种基于抗偏移磁耦合机构的变电站巡检机器人动态无线充电系统,针对现有变电站数量增多、规模扩大、以及智能化水平的提升,人工巡视的方式越来越难以满足要求的问题,该系统包括设置于变电站中的电能发送模块和设置于巡检机器人中的电能接收模块,共包括磁耦合机构、逆变器、整流桥、控制器、定位模块、切换控制模块等关键部分在内的系统子模块。本发明采用抗偏移磁耦合机构,具有更好的抗偏移能力,更适用于动态的感应耦合电能传输系统;本发明采用分段供电的动态无线充电系统,解决了发送端全线供电时,导轨损耗严重,系统可靠性较差的问题。此系统不仅仅局限于电力行业,在交通、民用也有着可以展望的前景。
技术研发人员:印宇涵,刘瀚
受保护的技术使用者:河海大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!