一种电机电角度校零方法、装置及存储介质与流程
本发明涉及电子,具体涉及一种电机电角度校零方法、装置及存储介质。
背景技术:
1、随着电力电子技术的高速发展,制造业产业升级的不断推进,为伺服产业的发展提供了巨大的市场。伺服产品的高精度控制得益于编码器的精确位置反馈,当编码器反馈信息所对应的电角度与实际电机电角度存在偏差时,电机则可能出现出力异常、堵转的情况,甚至失控飞车,危及人身安全。
2、目前的伺服电机厂家通常会在电机出厂时为编码器校零,但当编码器发生损坏,调测人员在更换编码器后未校零,或电机出厂时校零工作未做好,此时电角度存在一定偏置,电机将运转存在异常。
3、通常情况下,发生电角度偏置时,最直接的方式就是将编码器重新拆装校零。但部分编码器拆装较为困难,且非专业人士在拆装校零后仍会存在一定的电角度偏差。还有一种办法是通过将电机转子固定在零点后,缓慢旋转电机直到编码器零位触发,记录下脉冲的偏差进行补偿。
4、但是,上述两种方法过程较为复杂,需要调试人员花费较多的时间精力对编码器位置进行校零,降低了调试效率。
技术实现思路
1、本发明的目的在于提供一电机电角度校零、装置及存储介质,以解决编码器安装过程中存在偏置引起的电机运行异常的问题,从而降低调试人员工作量,提升调试效率。
2、为解决上述技术问题,本发明提出的技术方案如下:
3、第一方面,本发明实施例提供了一种电机电角度校零方法,包括以下步骤:
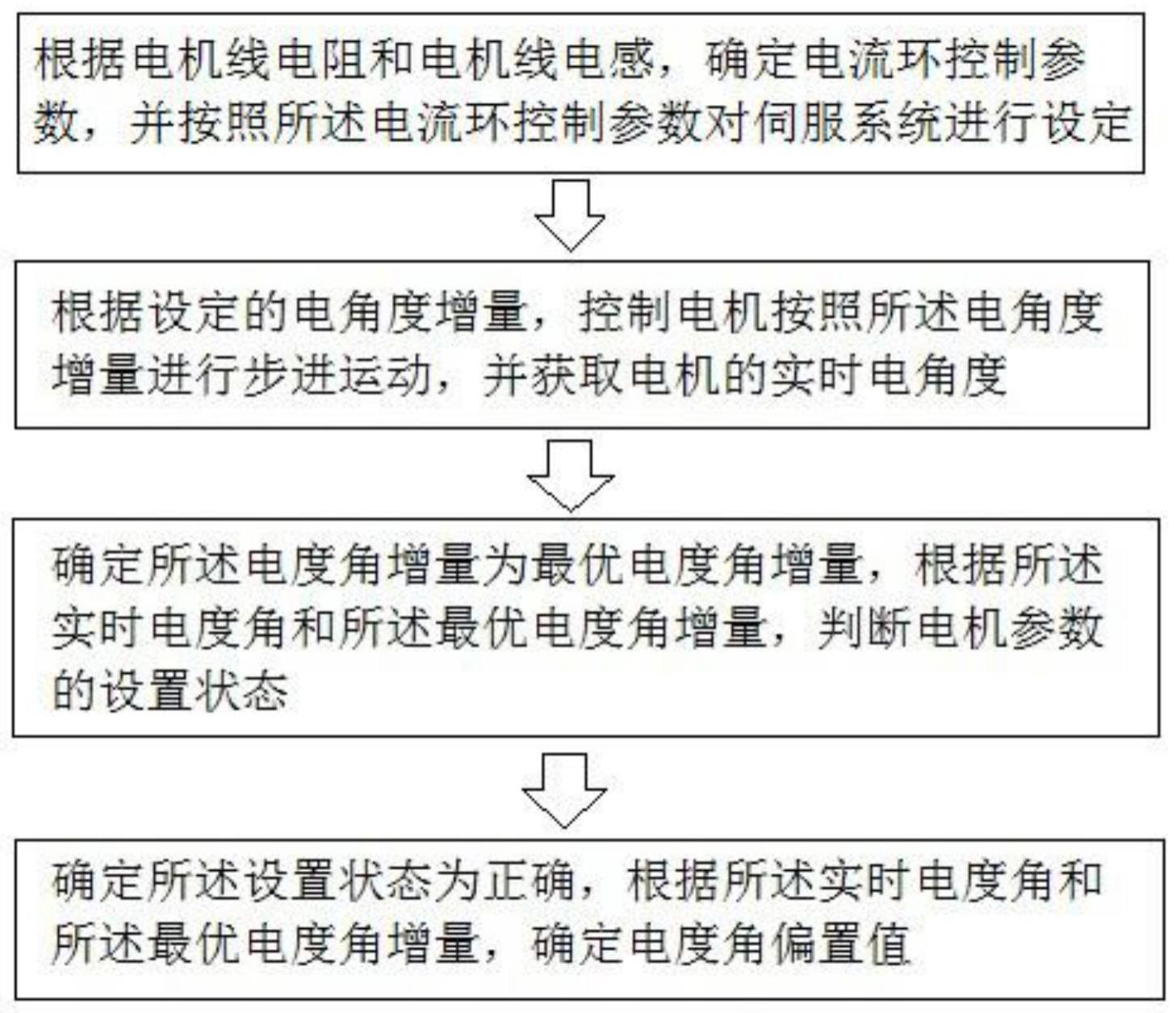
4、根据电机线电阻和电机线电感,确定电流环控制参数,并按照所述电流环控制参数对伺服系统进行设定;
5、根据设定的电角度增量,控制电机按照所述电角度增量进行步进运动,并获取电机的实时电角度;其中,所述电度角增量根据所述电机的反馈数据进行动态设定;
6、确定所述电度角增量为最优电度角增量,根据所述实时电度角和所述最优电度角增量,判断电机参数的设置状态;
7、确定所述设置状态为正确,根据所述实时电度角和所述最优电度角增量,确定电度角偏置值。
8、进一步地,所述的所述电度角增量根据所述电机的反馈数据进行动态设定,包括:
9、根据所述反馈数据中的电机转子位置,确定电机转速;
10、根据所述电机转速,动态调整所述电角度增量的递增比例系数,进而更新所述电角度增量,直到所述电角度增量不再变化,则所述电角度增量为最优电度角增量。
11、进一步地,所述递增比例系数的确定公式为:
12、
13、其中,v拖动为增比例系数,n为单次触发增量角度,x为pwm计数间隔,fpwm为pwm频率,pn为电机极对数。
14、进一步地,所述的根据所述电机转速,动态调整所述电角度增量的递增比例系数,包括:
15、确定在预设周期内所述电机转速的变化值大于波动阈值,降低pwm计数间隔;
16、确定在预设周期内所述电机转速的变化值小于或等于波动阈值,根据所述电机转速,调节单次触发增量角度。
17、进一步地,所述的根据所述电机转速,调节单次触发增量角度,包括:
18、确定所述电机转速大于预设的转速期望范围,降低所述单次触发增量角度;
19、确定所述电机转速处于所述转速期望范围内,保持所述单次触发增量角度不变;
20、确定所述电机转速低于所述转速期望范围,增大所述单次触发增量角度。
21、进一步地,所述的根据所述实时电度角和所述最优电度角增量,判断电机参数的设置状态,包括:
22、根据所述实时电度角生成电角度反馈曲线;
23、根据所述最优电度角增量,生成电角度期望曲线;
24、根据所述电角度反馈曲线和所述电角度期望曲线,判断电机参数的设置状态。
25、进一步地,所述的判断电机参数的设置状态,具体包括:
26、确定所述电角度反馈曲线和所述电角度期望曲线满足状态判断条件,判定所述设置状态为正确;
27、确定所述电角度反馈曲线和所述电角度期望曲线不满足状态判断条件,判定所述设置状态为异常。
28、进一步地,所述状态判断条件包括:
29、所述电角度反馈曲线中实时电度角的递增方向与所述电角度期望曲线中期望电度角的递增方向一致;
30、所述电角度反馈曲线中的实时波峰个数与所述电角度期望曲线中的期望波峰个数在相同时间周期内相等。
31、第二方面,本发明实施例还提供了一种电机电角度校零装置,所述电机电角度校零装置包括:
32、控制参数设定单元,用于根据电机线电阻和电机线电感,确定电流环控制参数,并按照所述电流环控制参数对伺服系统进行设定;
33、步进运动单元,用于根据设定的电角度增量,控制电机按照所述电角度增量进行步进运动,并获取电机的实时电角度;其中,所述电度角增量根据所述电机的反馈数据进行动态设定;
34、状态判断单元,用于确定所述电度角增量达到最优电度角增量,根据所述实时电度角和所述最优电度角增量,判断电机参数的设置状态;
35、偏置值确定单元,用于确定所述设置状态为正确,根据所述实时电度角和所述最优电度角增量,确定电度角偏置值。
36、第三方面,本发明实施例还提供了一种计算机存储介质,所述计算机存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如第一方面所述的电机电角度校零方法的步骤。
37、本发明的有益效果如下:
38、本发明通过先是判定电机参数的状态,进而在正确的电机参数环境下,根据实时电度角确定电度角偏置值,从而能实现自动完成电角度偏置校零工作,不仅有效提高了排错性,节省了调试人员大量的调试时间,而且偏置补偿准确率高,具有较强应用价值。并且本发明适用于所有采用编码器反馈位置解析获取电角度信息的电机,且编码器类型不受到限制,兼容性较强。
技术特征:
1.一种电机电角度校零方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的电机电角度校零方法,其特征在于:所述的所述电度角增量根据所述电机的反馈数据进行动态设定,包括:
3.根据权利要求2所述的电机电角度校零方法,其特征在于:所述递增比例系数的确定公式为:
4.根据权利要求3所述的电机电角度校零方法,其特征在于:所述的根据所述电机转速,动态调整所述电角度增量的递增比例系数,包括:
5.根据权利要求4所述的电机电角度校零方法,其特征在于:所述的根据所述电机转速,调节单次触发增量角度,包括:
6.根据权利要求1所述的电机电角度校零方法,其特征在于:所述的根据所述实时电度角和所述最优电度角增量,判断电机参数的设置状态,包括:
7.根据权利要求6所述的电机电角度校零方法,其特征在于:所述的判断电机参数的设置状态,具体包括:
8.根据权利要求7所述的电机电角度校零方法,其特征在于:所述状态判断条件包括:
9.一种电机电角度校零装置,其特征在于,所述电机电角度校零装置包括:
10.一种计算机存储介质,其特征在于,所述计算机存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至8中任一项所述的电机电角度校零方法的步骤。
技术总结
本发明公开一种电机电角度校零方法、装置及存储介质,方法根据电机线电阻和电机线电感,确定电流环控制参数;根据设定的电角度增量,控制电机按照所述电角度增量进行步进运动,并获取电机的实时电角度;确定所述电度角增量为最优电度角增量,根据所述实时电度角和所述最优电度角增量,判断电机参数的设置状态;确定所述设置状态为正确,根据所述实时电度角和所述最优电度角增量,确定电度角偏置值。本发明通过判定电机参数的状态,进而在正确的电机参数环境下,根据实时电度角确定电度角偏置值,从而能实现自动完成电角度偏置校零工作,不仅有效提高了排错性,节省了调试人员大量的调试时间,而且偏置补偿准确率高,具有较强应用价值。
技术研发人员:肖铭辰,尹智群
受保护的技术使用者:广州金升阳科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!