一种能够自主调节固有频率的压电俘能装置
本发明涉及压电俘能装置,尤其是涉及一种能够自主调节固有频率的压电俘能装置。
背景技术:
1、压电俘能技术可以俘获环境中的振动能量并将其转换成电能,从而为低功耗微电子设备供电。相比磁电式、静电式等其它俘能方式,压电俘能具有能量密度大、机电转换效率高、易于微机电集成等优势,因而受到了广泛关注。其中,悬臂梁式压电俘能器是一种基于矩形悬臂梁设计制造的共振型机械结构。悬臂梁式压电俘能器中,悬臂梁一端固定,该端为悬臂梁的固定端,另一端悬空,该端为悬臂梁的自由端,压电片粘贴在悬臂梁上靠近其固定端的位置,同时在悬臂梁的自由端附加配重来增大悬臂梁的振幅,由于其结构构型简单,因而被广泛使用。悬臂梁式压电俘能器具有一个特定的固有频率,当环境振动频率与该固有频率一致时,悬臂梁式压电俘能器将进入机械共振状态,能够发挥出最佳的俘能效果;而当环境振动频率偏离该固有频率时,悬臂梁式压电俘能器将退出机械共振状态,且俘能效果随环境振动频率相对于其固有频率偏离程度的扩大而急剧衰减。
2、由此可见,调节悬臂梁式压电俘能器的固有频率使之趋近于环境振动频率,是提升悬臂梁式压电俘能器性能的一个重要手段。如申请号为cn2 02111288785.3的中国发明专利申请中公开了一种自调谐压电俘能装置。基于合理的材料、结构、力学等综合优化设计方法,该自调谐压电俘能装置能够在预设的外部激励条件下改变其固有频率与环境振动频率匹配,以提升压电俘能效果。该环境振动频率的固有频率调节方式是无源被动的,不需要依靠附加的主动调节机构,也不需要消耗外部能量,因此该环境振动频率的硬件成本较低;但是,被动调节方式需要在预设的外部激励条件下才能被激活,因此该环境振动频率的应用范围受限,且可靠性较低。
3、相比固有频率被动调节方式而言,采用固有频率主动调节方式的压电俘能装置的应用范围更广且可靠性更高。如申请号为cn201710169222.x的中国发明专利中公开了一种能够自主适应变频的压电俘能装置。该压电俘能装置利用专用的振动传感器检测环境振动频率,然后控制一个音圈电机驱动安装在悬臂梁上的夹持装置沿悬臂梁长度方向移动,改变悬臂梁的有效长度来调节该压电俘能装置的固有频率使之趋近于环境振动频率。虽然该压电俘能装置的应用范围广且可靠性高,但其需要配置额外的振动传感器和昂贵的音圈电机,造成了高昂的硬件成本。
4、又如申请号为cn201811490567.6的中国专利中公开了一种能自动调节共振频率和带宽的压电俘能装置,该压电俘能装置通过检测压电片的开路电压与短路电流来判断悬臂梁的工作状态,并采用电机正反旋转丝杠驱动质量块在悬臂梁上做直线位移运动来调节固有频率,从而提升压电俘能效果。由于压电片的短路电流通常只有几百微安且为交流形式,对检测压电片的短路电流的电流检测电路的精度和信噪比要求极高。采用高性能硬件电路实现电流检测电路可提升可靠性,但这会极大地增加了该压电俘能装置的硬件成本;采用低性能硬件电路实现电流检测电路可降低硬件成本,但同时也降低了该压电俘能装置的可靠性。因此,整体而言,虽然该压电俘能装置的应用范围广,但其可靠性与硬件成本之间存在较大矛盾。
技术实现思路
1、本发明所要解决的技术问题是提供一种在具有低硬件成本的同时,应用范围广且可靠性高的能够自主调节固有频率的压电俘能装置。
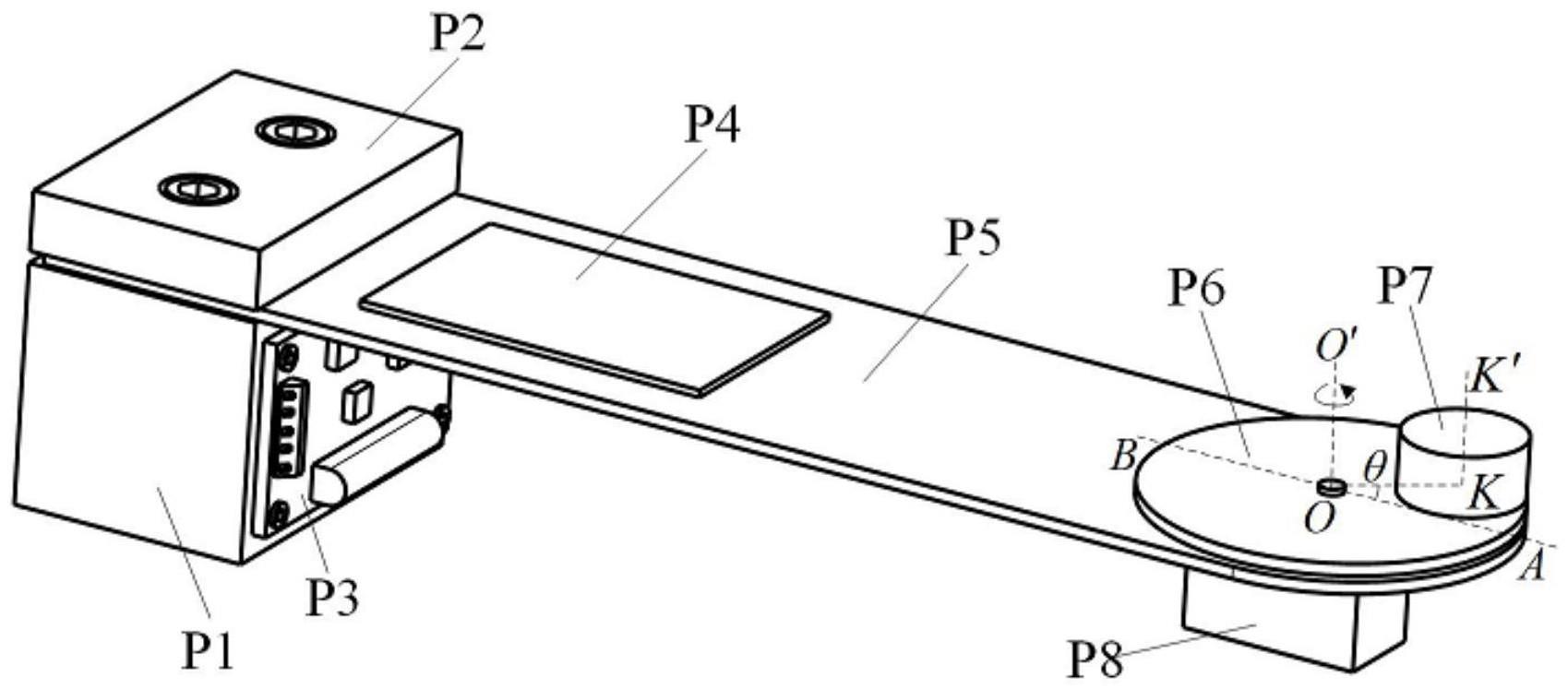
2、本发明解决上述技术问题所采用的技术方案为:一种能够自主调节固有频率的压电俘能装置,包括具有固定端和自由端的悬臂梁、压电片和配重质量块,所述的悬臂梁的固定端到其自由端所处方向为所述的悬臂梁的长度方向,所述的压电片粘贴在所述的悬臂梁的上表面且靠近所述的悬臂梁的固定端,所述的压电俘能装置还包括控制器、圆形转盘和舵机,所述的控制器内预存有悬臂梁固有频率与舵机转轴旋转角度之间的数学映射关系,所述的舵机安装在所述的悬臂梁的自由端,所述的舵机的转轴从下到上垂直穿过所述的悬臂梁,所述的圆形转盘位于所述的悬臂梁上方,所述的圆形转盘以共轴方式安装在所述的舵机的转轴上,所述的配重质量块位于所述的圆形转盘上方,且安装在所述的圆形转盘上,所述的配重质量块的安装位置靠近所述的圆形转盘的外圆周,所述的配重质量块沿所述的圆形转盘径向的尺寸小于所述的圆形转盘的半径,所述的压电片和所述的舵机分别与所述的控制器连接;当所述的悬臂梁在环境振动激励下发生受迫振动时,会使所述的压电片发生周期性形变从而输出压电交流电压给所述的控制器;所述的控制器一方面对输入其内的压电交流电压进行整流后充电至可充电电池中进行电能储存,另一方面根据输入其内的压电交流电压计算得到当前环境振动频率,然后将当前环境振动频率作为悬臂梁固有频率,根据其内预存的悬臂梁固有频率与舵机转轴旋转角度之间的数学映射关系,得到对应的舵机转轴旋转角度,该舵机转轴旋转角度即为所述的悬臂梁的固有频率调节的目标值,根据该目标值控制所述的舵机转动至相应角度处,改变所述的配重质量块的位置,从而调节所述的悬臂梁的固有频率使之趋近环境振动频率,提高压电俘能效果。
3、所述的悬臂梁的固有频率调节的目标值记为θ,其取值范围为0度~180度,当所述的舵机转轴旋转角度为0度时,所述的配重质量块位于所述的悬臂梁长度方向的最外端,此时所述的悬臂梁具有最小的固有频率,将其记为fmin;当所述的舵机转轴旋转角度为180度,所述的配重质量块位于所述的悬臂梁长度方向的最内端,此时所述的悬臂梁具有最大的固有频率,将其记为fmax;在所述的舵机转轴旋转角度从0度增大到180度过程中,所述的配重质量块从位于所述的悬臂梁长度方向的最外端向最内端移动,使得所述的悬臂梁的固有频率从fmin增大到fmax;将当前环境振动频率记为fe,当fe小于等于fmin时,此时所述的悬臂梁的固有频率调节的目标值θ为0度,所述的控制器控制所述的舵机转轴旋转至0度位置处,调节悬臂梁的固有频率为fmin;当fe大于等于fmax时,此时所述的悬臂梁的固有频率调节的目标值θ为180度,所述的控制器控制所述的舵机转轴旋转至180度位置处,调节悬臂梁的固有频率为fmax;当fe位于fmin和fmax之间时,所述的控制器根据其内预存的悬臂梁固有频率与舵机转轴旋转角度之间的数学映射关系确定所述的舵机转轴旋转角度的目标值,并最终驱动所述的舵机旋转对应目标值角度,从而调节所述悬臂梁的固有频率为fe。
4、所述的控制器输出幅值为3.3v,周期为20ms,脉冲宽度为(θ/90+0.5)ms的方波信号给所述的舵机,所述的舵机在输入其内的方波信号作用下驱动所述的圆形转盘及所述的配重质量块一同旋转至目标值θ对应的位置处。
5、所述的压电片具有正输出端和负输出端,所述的压电片的正输出端和负输出端分别产生一路交流电压信号输出,将所述的压电片的正输出端输出的交流电压信号称为正端交流电压信号,将所述的压电片的负输出端输出的交流电压信号称为负端交流电压信号,所述的压电交流电压包括所述的正端交流电压信号和所述的负端交流电压信号;所述的控制器包括同步电荷提取电路、稳压电路、同频方波发生电路和单片机,所述的同步电荷提取电路用于提取所述的压电片输出的压电交流电压,并对该压电交流电压进行整流后输出给所述的可充电电池,对所述的可充电电池充电使其电量增加;所述的同频方波发生电路用于获取所述的正端交流电压信号,并对该正端交流电压信号进行比较处理,输出同频方波信号给所述的单片机,所述的单片机通过对输入其内的同频方波信号进行脉冲上升沿计数来计算同频方波信号的频率,该频率即为当前环境振动频率;所述的单片机根据计算所得的当前环境振动频率确定所述的悬臂梁的固有频率调节的目标值。
6、所述的配重质量块沿所述的圆形转盘径向的尺寸小于所述的圆形转盘的半径的1/10。
7、所述的悬臂梁的固定端通过固定基座和盖板进行固定,所述的固定基座位于所述的悬臂梁的固定端的下方,所述的盖板位于所述的悬臂梁的固定端的上方。
8、与现有技术相比,本发明的优点在于通过设置控制器、圆形转盘和舵机,控制器内预存有悬臂梁固有频率与舵机转轴旋转角度之间的数学映射关系,舵机安装在悬臂梁的自由端,舵机的转轴从下到上垂直穿过悬臂梁,圆形转盘位于悬臂梁上方,圆形转盘以共轴方式安装在舵机的转轴上,配重质量块位于圆形转盘上方,且安装在圆形转盘上,配重质量块的安装位置靠近圆形转盘的外圆周,配重质量块沿圆形转盘径向的尺寸小于圆形转盘的半径,压电片和舵机分别与控制器连接;当悬臂梁在环境振动激励下发生受迫振动时,会使压电片发生周期性形变从而输出压电交流电压给控制器;控制器一方面对输入其内的压电交流电压进行整流后充电至可充电电池中进行电能储存,另一方面根据输入其内的压电交流电压计算得到当前环境振动频率,然后将当前环境振动频率作为悬臂梁固有频率,根据其内预存的悬臂梁固有频率与舵机转轴旋转角度之间的数学映射关系,得到对应的舵机转轴旋转角度,该舵机转轴旋转角度即为悬臂梁的固有频率调节的目标值,根据该目标值控制舵机转动至相应角度处,改变配重质量块的位置,从而调节悬臂梁的固有频率使之趋近环境振动频率,提高压电俘能效果,本发明能够自主感知环境振动频率,自适应进行固有频率的调整,频率测量精度较高,且测量过程不需要借助额外的振动传感器,也不需要采用高性能的电流检测电路,降低了硬件成本,由此在具有低硬件成本的同时,应用范围广且可靠性高。
- 还没有人留言评论。精彩留言会获得点赞!