SPMSM驱动系统的无模型预测直接速度控制方法及系统
本发明属于永磁同步电机控制,具体涉及一种spmsm驱动系统的无模型预测直接速度控制方法及系统。
背景技术:
1、为了提高动态响应能力和简化控制结构,近年来,模型预测直接速度控制(mpdsc)被应用于永磁同步电机驱动中。mpdsc将速度直接作为控制目标添加到代价函数中,同时根据电机的速度和电流预测模型预测下一时刻的速度和电流,并通过最小化代价函数来选择最佳控制状态。mpdsc充分利用了模型预测控制的灵活约束,集成了速度环和电流环,简化了控制系统的结构。
2、然而,与大多数基于模型的控制方法一样,mpdsc方法的性能在很大程度上取决于准确的预测模型。因此,mpdsc中使用的多参数值需要了解稳定的实际参数才能达到良好的控制目标,例如电感、磁链和转动惯量。实际上,当电机在实际环境中运行时,电机参数会受到各种内部和外部干扰的影响。
3、由于温度升高和磁路饱和,电感和磁链受到不同程度的扰动,这将导致电流稳态误差甚至振荡,严重影响控制系统的稳定性。此外,在建立预测模型时,系统中没有考虑外部干扰。传统的mpdsc是基于标称模型建立的,其假设负载扰动为零或固定值。外部负载扰动会降低速度控制性能,并影响系统的动态和静态性能。为了增强传统mpdsc的鲁棒性,目前有一些改进方法,包括参数辨识方法和基于观测器的方法等。然而,这些方法没有同时考虑多参数摄动,只解决了单个参数摄动问题。
技术实现思路
1、本发明提供一种spmsm驱动系统的无模型预测直接速度控制方法及系统,以解决现有技术存在的上述至少一个问题。
2、根据本发明的第一方面,本技术中一个或多个实施例提供了spmsm驱动系统的无模型预测直接速度控制方法,内容包括以下步骤:
3、s1、建立spmsm在参数扰动下的数学模型;
4、s2、根据所述数学模型建立考虑参数扰动下spmsm的超局部模型来预测有限个开关状态作用下的电流和速度,所述参数扰动包括已建模部分和未知扰动;通过扩展滑模观测器来对未知扰动进行观测;
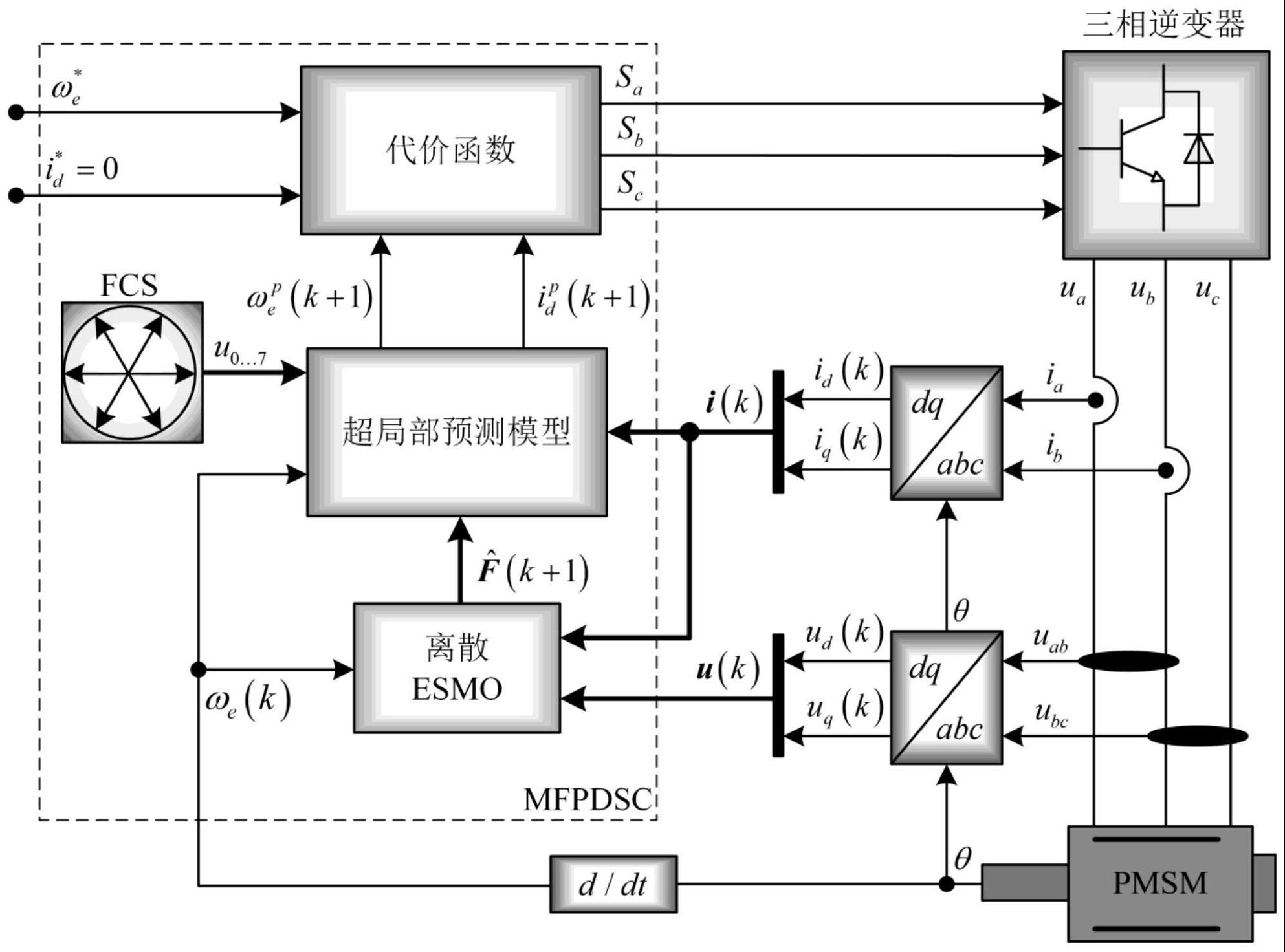
5、s3、根据spmsm的超局部模型和扩展滑模观测器构建无模型预测直接速度控制器,将速度直接作为控制目标加入代价函数中,并通过代价函数评估spmsm的超局部模型的每个预测的状态,选择最佳状态的预测值所对应的开关状态输出到三相逆变器来控制速度和电流。
6、基于本发明的上述技术方案,还可以作出如下改进:
7、可选的,步骤s1中,当考虑电机参数扰动时,spmsm在d-q坐标系下的状态方程表示为:
8、
9、式中,ud和uq分别为d轴和q轴定子电压;id和iq分别为d轴和q轴定子电流;rs为定子电阻;lso和ψro分别为定子电感标称值和永磁体磁链标称值;ωe为电角速度;
10、其中,δd和δq分别为d轴和q轴电流环的不确定性扰动,其表达式为:
11、
12、式中,δls=ls-lso和δψr=ψr-ψro分别是电感和磁链幅值变化量;ls和ψr分别是实际定子电感和磁链幅值;
13、考虑到参数扰动,spmsm的机械方程表示为:
14、
15、式中,np是极对数;jo和b分别表示旋转惯量标称值和粘性摩擦系数;δj=j-jo是旋转惯量误差;δte是由磁链不匹配引起的电磁转矩扰动,δtl为转矩扰动。
16、可选的,步骤s2中,对于单输入单输出系统,spmsm的超局部模型表示如下:
17、
18、式中,y和u分别是系统输出和控制输入;f表示系统中已知和不确定性的部分;α是待设计常数;
19、根据式(1)、(3)和(4),spmsm速度环和电流环的超局部模型表示为:
20、
21、式中,x=[id iqωe]t是状态变量;u=[ud uq iq]t是控制输入;α=diag(αd,αq,αω)是设计增益;f=[fd fq fω]t表示spmsm驱动系统中的已建模部分和未知扰动。
22、可选的,基于一阶前向欧拉法,由式(5)得到离散的spmsm的超局部模型为:
23、
24、式中,和分别表示在第(k+1)时刻d轴电流、q轴电流和速度的预测值;id(k)、iq(k)和ωe(k)分别是第k时刻的d轴电流、q轴电流和速度的测量值;ud(k)和uq(k)分别是k时刻所选d轴和q轴电压;ts是电流采样时间;tsp是速度采样时间,tsp=10ts;基于机械时间常数大于电气时间常数,在相邻的采样周期中,电流对速度的影响几乎相同,因此在spmsm的超局部模型中采用代替iq(k)。
25、可选的,代价函数表示为:
26、
27、式中,和表示电流和转速参考值;λω和λd表示速度和电流的权重系数,其值的选取基于电流和速度响应之间的折衷;clim表示最大电流限制:
28、
29、式中,imax是最大允许电流。
30、可选的,为了对spmsm速度环和电流环的超局部模型中的未知扰动进行准确估计,将spmsm的超局部模型中的未知扰动扩展为状态变量,得到扩展超局部模型并表示为:
31、
32、式中,f=[fd fq fω]t是相应未知扰动的变化率;
33、根据式(9),建立扩展滑模观测器为:
34、
35、式中,是x的观测值,是f的观测值,usmo=[udsmo uqsmo uωsmo]t是滑模控制率;g=diag(gd,gq,gω)是参数矩阵;
36、由式(10)减去式(9),获得观测误差动态为:
37、
38、式中,e1=[ed eq eω]t,和e2=[efdefq efω]t,和
39、选择s=e1作为滑模面,为提高扩展滑模观测器的精度,滑模趋近率选取为:
40、
41、式中,k=diag(k1,k2,k3)和λ=diag(λ1,λ2,λ3)是参数矩阵,均为正值;
42、然后将(12)代入(11)得到:
43、e2-usmo=-λe1-ksgn(e1) (13)
44、将e2视作扰动,滑模控制率设计为
45、usmo=λe1+ksgn(e1) (14)。
46、根据本发明的另一方面,提供了一种spmsm驱动系统的无模型预测直接速度控制系统,包括处理器、存储器以及储存与所述存储器上的计算机程序,所述处理器执行所述计算机程序时实以上任一所述的spmsm驱动系统的无模型预测直接速度控制方法。
47、本发明的有益效果是,本发明提供了一种spmsm驱动系统的无模型预测直接速度控制方法及系统,设计了一种基于spmsm超局部模型的mfpdsc方法,提出了一种扩展滑模观测器并对未知部分准确估计。仿真结果表明,所设计的mfpdsc方法不仅保留了无模型控制无需精确模型的优点,而且提高了传统模型预测直接速度控制策略的抗扰能力和动态性能。
- 还没有人留言评论。精彩留言会获得点赞!