提升构网型变流器暂稳的自适应惯性阻尼协同控制方法
本发明涉及微电网技术、电力控制领域,具体为提升构网型变流器暂稳的自适应惯性阻尼协同控制方法。
背景技术:
1、随着可再生能源发电的日益普及,同步发电机逐渐被基于逆变器的分布式发电单元(ibg,inverter-based distributed generations)所取代,电力系统的动态稳定行为也逐渐发生了变化。一方面,ibg提供了更多的控制灵活性。另一方面,在大扰动下必须考虑转换器的器件脆弱性。因此,如何灵活配置可用的ibg控制资源仍然是一个悬而未决的问题。传统的ibg通过锁相环(pll)与电网同步,并倾向于在电网跟随模式下运行。这种跟网型逆变器可以等效于受控电流源,其正常运行取决于系统中是否存在电压源来建立电压参考。然而,跟网型转换器的稳定运行将受到同步发电机比例逐渐下降的限制,导致缺乏电压支持。为了应对这一挑战,构网型变流器的概念已被广泛引入,以提供电压支持并增强系统稳定性。下垂控制和虚拟同步发电机(vsg)控制是两种典型的构网型变流器控制方法。vsg控制可以被重新视为具有更强大的虚拟惯性支持和动态频率性能优化的改进下垂控制方案。
2、vsg控制的一个优点是其调节控制参数的灵活性。例如,虚拟惯性可以根据系统运行的实时状态在一定范围内进行调整,这为vsg的动态性能优化提供了更多的可能性。这种灵活性允许通过自适应惯性等技术提高频率稳定性。然而,目前的研究工作只关注可变控制参数对频率稳定性的影响,而忽略了可变虚拟惯性和阻尼对暂态同步稳定性的影响。暂态同步稳定性对稳定运行也至关重要。为了保证分布式能源和微电网“并的上,发的出,用的掉”,亟需充分利用变流器接口可再生能源的控制灵活性,提升系统在大扰动下的暂态穿越和并网同步运行能力。
3、为了提升构网型变流器在大扰动下的暂态同步稳定性,本专利引入了基于自适应惯性阻尼协同(adaptive inertia and damping coordination,aidc)的控制思路,该思路兼顾了频率稳定性与暂态同步稳定性。虚拟惯性被设计为在加速区域自适应地增加,在减速区域自适应地减小。阻尼则在整个暂态过程中自适应增加以增强阻尼效应。虚拟惯性和阻尼的自适应调节是基于arctan函数实现的,有效保证了自适应虚拟惯性和阻尼的边界。为目前构网型变流器在大信号扰动下的安全、稳定、可靠运行提供了一种实用化的解决方案。
4、目前现有技术如下:
5、申请号cn202110784238.8,名称一种vsg虚拟惯量和阻尼协同自适应控制系统及方法,该方法根据双馈风机虚拟同步控制原理图建立包含风速变量的小信号模型,利用模糊控制器以运行风速和频率偏差作为输入确定虚拟惯性系数稳态值,为避免系统振荡失稳,根据临界振荡风速与运行风速的大小关系确定阻尼系数稳态值;根据频率偏差和频率变化率和控制参数的关系,以及调频过程的需求变化,交错自适应调整控制参数。本发明提供的vsg虚拟惯量和阻尼协同自适应控制系统及方法,有利于双馈风机适应不同的风速,在避免系统振荡失稳前提下,提升了调频效果。
6、其采用复杂模糊控制器算法进行自适应控制虚拟惯性和阻尼值,利用以运行风速和频率偏差作为输入确定虚拟惯性系数稳态值,为避免系统振荡失稳,根据临界振荡风速与运行风速的大小关系确定阻尼系数稳态值;
7、本技术有三大不同:
8、1)上述文件核心目标是提升主动调频和功率振荡能力,本技术核心目标是提升故障下变换器的故障穿越和暂态同步稳定能力,设计目标不同;
9、2)上述文件利用模糊控制算法,稳定设计复杂,机理不清晰,本技术采用数学表达式直接构造法,定量表述虚拟惯性和阻尼随系统运行状态的关联,实施控制算法不同;
10、3)上述文件利用运行风速和频率偏差作为输入量,本技术中利用频率偏差和频率变化率作为输入变量,且本技术构造算法采用actan函数,保证惯性和频率的上下有界性,控制手段变量和构造函数均不同。
技术实现思路
1、为了解决以上问题,本发明提出提升构网型变流器暂稳的自适应惯性阻尼协同控制方法,兼顾了频率稳定性与暂态同步稳定性。虚拟惯性被设计为在加速区域自适应地增加,在减速区域自适应地减小。阻尼则在整个暂态过程中自适应增加以增强阻尼效应。虚拟惯性和阻尼的自适应调节是基于arctan函数实现的,有效保证了自适应虚拟惯性和阻尼的边界,这便利了工程师在实际应用时的设计。
2、为实现上述目的,本发明采取的技术方案是:
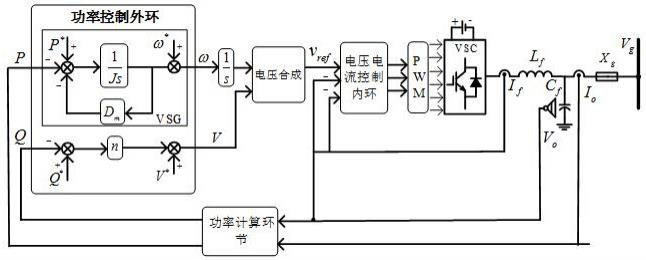
3、提升构网型变流器暂稳的自适应惯性阻尼协同控制方法,基于虚拟同步发电机控制,具体如下:
4、所述自适应惯性阻尼协同控制方法的控制表达式为:
5、
6、其中,p*表示有功功率参,p是构网型变流器的输出有功功率,j和dm分别表示虚拟惯性常数和阻尼系数,ω*是电压角速度基准,ω是构网型变流器输出电压的角速度;
7、所述控制方法的虚拟惯性阻尼设计准则如下:
8、 时段 δω dω/dt ω状态 区域 δj δd <![cdata[t<sub>1</sub>-t<sub>2</sub>]]> >0 >0 偏离 加速 >0 >0 <![cdata[t<sub>2</sub>-t<sub>3</sub>]]> >0 <0 返回 减速 <0 >0 <![cdata[t<sub>3</sub>-t<sub>4</sub>]]> <0 <0 偏离 加速 >0 >0 <![cdata[t<sub>4</sub>-t<sub>5</sub>]]> <0 >0 返回 减速 <0 >0
9、其中,δj和δdm表示设计的虚拟惯性常数和阻尼系数的动态控制变量;
10、虚拟惯性被设计为在加速区域自适应地增加,在减速区域自适应地减小,阻尼则在整个暂态过程中自适应增加以增强阻尼效应;
11、具体表述如下:
12、电网故障发生在b点和时刻t1,在从b点到c点的第一段期间从t1到点t2,频率将加速,并且暂态功角增加,这个区域被称为加速区域,此时,需要一个大的虚拟惯性来减缓偏差趋势并减少最大频率偏差,在c点,它到达稳态点,在从c点到d点的第二段,从t2到t3,频率会减速,但δω大于零,功角仍然增加,这个区域被称为减速区域;
13、在这个过程中,需要小的惯性才能使构网型变流器快速恢复到频率基准;
14、所述虚拟惯性和阻尼的自适应调节是基于arctan函数实现的,具体表述如下
15、
16、
17、其中,j0和dm0表示虚拟惯性常数和阻尼系数的静态控制变量,而δj和δdm表示设计的虚拟惯性常数和阻尼系数的动态控制变量,kj和kd分别表示虚拟惯性和阻尼的自适应系数。
18、作为本发明进一步改进,所述自适应惯性阻尼协同控制方法还包含两个方面:
19、1)基于δω和dω/dt的自适应虚拟惯性;
20、虚拟惯性j0+δj需要在加速区域增加,在减速区域减少,根据δω和dω/dt的组合进行自适应更改,此外,最大虚拟惯性jmax与逆变器的瞬时功率容量限制有关,并且需要最小虚拟惯性jmin来满足频率稳定性要求,因此自适应虚拟惯性需要存在一个上下限,数学函数δj=arctan(δω·dω/dt)保证了自适应虚拟惯性的边界;
21、2)基于dω/dt的自适应阻尼;
22、阻尼系数d0+δdm设计为根据dω/dt自适应增加,并在扰动下扩大系统阻尼效果,δdm为暂态阻尼项,需要在暂态稳定性问题期间为正,在稳态时返回零,数学函数δdm=arctan2(dω/dt)也提供了一个上限,并保证δdm在整个加速/减速的暂态过程中保持正值。
23、有益效果:
24、本发明公开了一种针对提升构网型变流器的暂态同步稳定性的自适应惯性阻尼协同(adaptive inertia and damping coordination,aidc)控制方法。其中,该构网型变流器功率外环的基础控制方案为虚拟同步发电机(virtual synchronous generator,vsg)控制。另外,为了实现暂态同步稳定性的提升,设计了自适应惯性阻尼协同(aidc)控制方法。该方法兼顾了频率稳定性与暂态同步稳定性。虚拟惯性被设计为在加速区域自适应地增加,在减速区域自适应地减小。阻尼则在整个暂态过程中自适应增加以增强阻尼效应。虚拟惯性和阻尼的自适应调节是基于arctan函数实现的,有效保证了自适应虚拟惯性和阻尼的边界,这便利了工程师在实际应用时的设计。
- 还没有人留言评论。精彩留言会获得点赞!