一种智能巡检机器人
本发明涉及线缆巡检机器人,更具体地说,本发明涉及一种智能巡检机器人。
背景技术:
1、机器人是一种能够半自主或全自主工作的智能机器,机器人能够通过编程和自动控制来执行诸如作业或移动等任务,机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
2、实际情况中,随着经济的不断发展,科学技术水平的不断提高,高压线缆上的巡检机器人也不断的在发展,而运用在高压线缆上的巡检机器人不仅仅具有破冰功能,同时也能够对高压线缆进行巡检,从而提前发现高压线缆上的问题,进一步的保证高压线缆的正常运行,但是在现有的巡检机器人中会采用无人机的方式将巡检机器人放置到高压线缆上,但是由于巡检机器人体积比较大,因此工作人员在进行操作的时候,很容易导致巡检设备触碰到高压线上,从而导致高压线的损坏。
3、因此我们提出了一种智能巡检机器人来解决上述问题。
技术实现思路
1、为了克服现有技术的上述缺陷,本发明的实施例提供一种智能巡检机器人,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:一种智能巡检机器人,包括两块安装竖板,两块所述安装竖板上固定连接有同一块连接板,所述连接板上固定连接有固定板,所述固定板上固定连接有多块支撑块;
3、所述固定板上固定连接有旋转组件,所述旋转组件的一侧设有无人机,所述旋转组件与无人机活动连接;
4、两块所述安装竖板之间设有滚动组件,两块所述安装竖板上均连接有驱动组件,两个所述驱动组件分别与滚动组件传动连接;
5、两块所述安装竖板上均连接有多个支撑组件,多个所述支撑组件相互磁性连接;
6、两块所述安装竖板上均固定连接有升降组件,两个所述升降组件上均连接有收卷组件,两个所述收卷组件的下端设有同一个巡检组件。
7、在一个优选地实施方式中,所述滚动组件包括设置于两块安装竖板之间的多根固定轴,多根所述固定轴上均套接有第一皮带轮,多根所述固定轴上均套接有滑轮。
8、在一个优选地实施方式中,所述驱动组件包括固定连接于安装竖板上的第一电机,所述第一电机的驱动轴上固定连接有第一转轴,所述第一转轴的侧壁上同轴固定连接有第二皮带轮,所述第二皮带轮通过皮带与第一皮带轮传动连接。
9、在一个优选地实施方式中,所述支撑组件包括固定连接于安装竖板侧壁上的伸缩柱,所述伸缩柱上插设有伸缩杆,所述伸缩杆的一端固定连接有第一电磁铁,两块所述第一电磁铁相互磁性连接,所述第一电磁铁分别处于滑轮的下方。
10、在一个优选地实施方式中,两个所述升降组件包括分别固定连接于两块安装竖板上的竖板,两块所述竖板上均固定连接有第二电机,两块所述竖板的侧壁上均固定连接有第二电机,两块所述竖板上均固定连接有第二电磁铁。
11、在一个优选地实施方式中,两个所述收卷组件包括分别固定连接于第二电机驱动轴上的第二转轴,两根所述第二转轴上均同轴固定连接有绕线轮,两个所述绕线轮上均固定连接有钢丝绳,两根所述钢丝绳的一端均固定连接有挂钩。
12、在一个优选地实施方式中,所述巡检组件包括分别设置于两个挂钩下方的吊环,两个所述吊环的下端固定连接有同一块横板,所述横板的下端固定连接有巡检设备,所述横板上固定连接有两块铁板,且两块铁板分别处于两块第二电磁铁的正下方。
13、在一个优选地实施方式中,所述旋转组件包括固定连接于固定板上的第三电机,所述固定板上固定连接有轴承座,所述第三电机的驱动轴上固定连接有第三转轴,且第三转轴的一端延伸至轴承座中,所述第三转轴上套接有转筒。
14、在一个优选地实施方式中,所述转筒的侧壁上固定连接有第二安装板,所述第二安装板的一侧设有折弯板,所述折弯板贴合于无人机和第二安装板的连接处,所述折弯板上螺纹连接有多根安装螺丝,且多根安装螺丝的一端分别与无人机和第二安装板螺纹连接。
15、本发明的技术效果和优点:
16、本装置将无人机和巡检设备结合在一起,从而方便工作人员将巡检设备放置到高压线缆上,同时装置中的各个部分可以根据实际情况从而移动,这样就方便工作人员对巡检设备的检修和收纳,同时工作人员再驱动装置的时候,不仅仅可以使用第一电机进行驱动,还能够使用无人机对其进行驱动,进一步的保证了驱动的稳定性,同时工作人员能够将无人机进行拆卸,这样就可以使无人机单独使用,避免了无人机的浪费,从而提高了资源的利用率,间接的提高了装置的实用性。
技术特征:
1.一种智能巡检机器人,包括两块安装竖板(1),两块所述安装竖板(1)上固定连接有同一块连接板(2),所述连接板(2)上固定连接有固定板(3),所述固定板(3)上固定连接有多块支撑块(4),其特征在于;
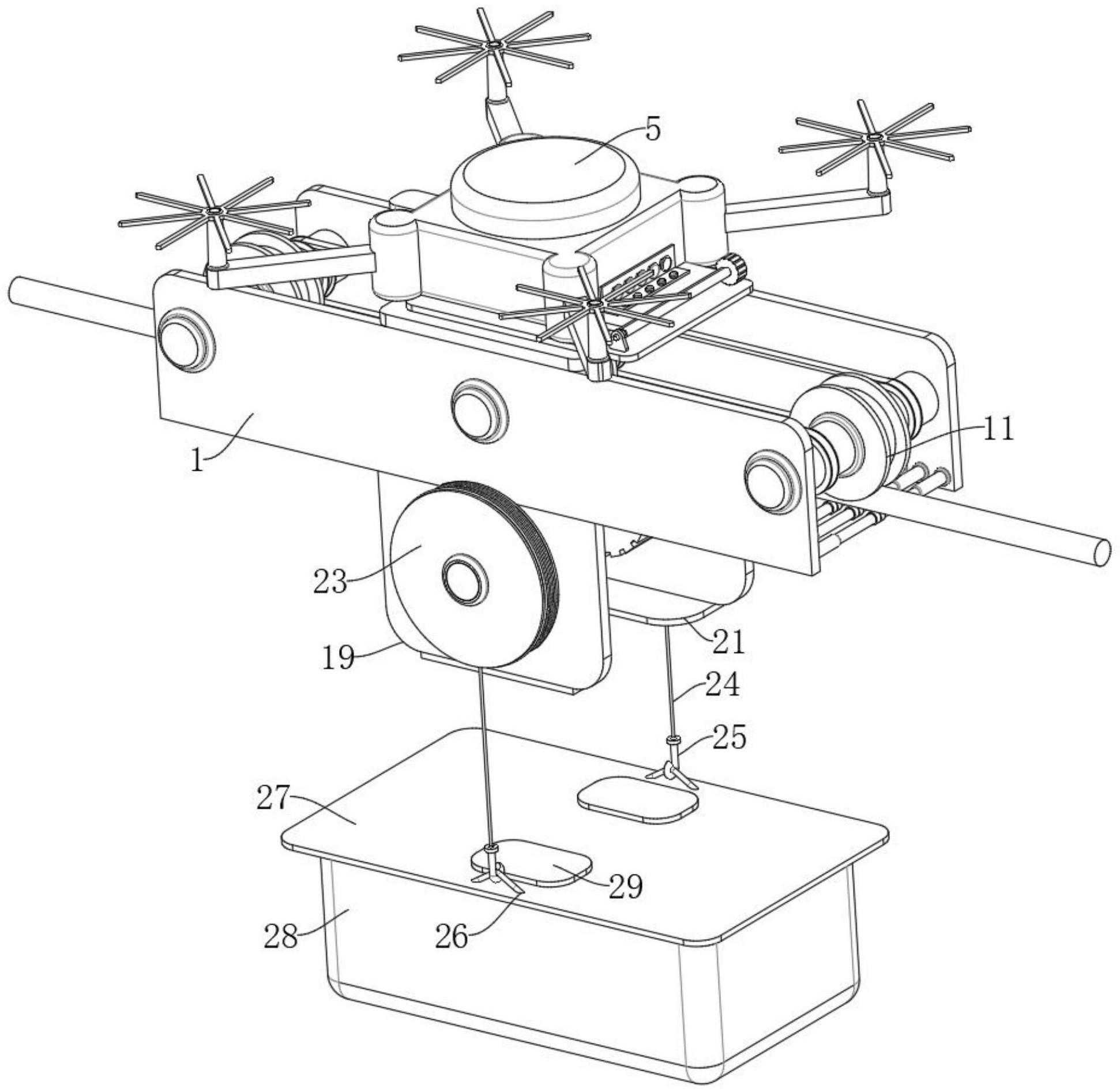
2.根据权利要求1所述的一种智能巡检机器人,其特征在于:所述滚动组件包括设置于两块安装竖板(1)之间的多根固定轴(9),多根所述固定轴(9)上均套接有第一皮带轮(10),多根所述固定轴(9)上均套接有滑轮(11)。
3.根据权利要求1所述的一种智能巡检机器人,其特征在于:所述驱动组件包括固定连接于安装竖板(1)上的第一电机(12),所述第一电机(12)的驱动轴上固定连接有第一转轴(13),所述第一转轴(13)的侧壁上同轴固定连接有第二皮带轮(14),所述第二皮带轮(14)通过皮带(15)与第一皮带轮(10)传动连接。
4.根据权利要求1所述的一种智能巡检机器人,其特征在于:所述支撑组件包括固定连接于安装竖板(1)侧壁上的伸缩柱(16),所述伸缩柱(16)上插设有伸缩杆(17),所述伸缩杆(17)的一端固定连接有第一电磁铁(18),两块所述第一电磁铁(18)相互磁性连接,所述第一电磁铁(18)分别处于滑轮(11)的下方。
5.根据权利要求1所述的一种智能巡检机器人,其特征在于:两个所述升降组件包括分别固定连接于两块安装竖板(1)上的竖板(19),两块所述竖板(19)上均固定连接有第二电机(20),两块所述竖板(19)的侧壁上均固定连接有第二电机(20),两块所述竖板(19)上均固定连接有第二电磁铁(21)。
6.根据权利要求5所述的一种智能巡检机器人,其特征在于:两个所述收卷组件包括分别固定连接于第二电机(20)驱动轴上的第二转轴(22),两根所述第二转轴(22)上均同轴固定连接有绕线轮(23),两个所述绕线轮(23)上均固定连接有钢丝绳(24),两根所述钢丝绳(24)的一端均固定连接有挂钩(25)。
7.根据权利要求6所述的一种智能巡检机器人,其特征在于:所述巡检组件包括分别设置于两个挂钩(25)下方的吊环(26),两个所述吊环(26)的下端固定连接有同一块横板(27),所述横板(27)的下端固定连接有巡检设备(28),所述横板(27)上固定连接有两块铁板(29),且两块铁板(29)分别处于两块第二电磁铁(21)的正下方。
8.根据权利要求1所述的一种智能巡检机器人,其特征在于:所述旋转组件包括固定连接于固定板(3)上的第三电机(30),所述固定板(3)上固定连接有轴承座(31),所述第三电机(30)的驱动轴上固定连接有第三转轴(32),且第三转轴(32)的一端延伸至轴承座(31)中,所述第三转轴(32)上套接有转筒(33)。
9.根据权利要求8所述的一种智能巡检机器人,其特征在于:所述转筒(33)的侧壁上固定连接有第二安装板(34),所述第二安装板(34)的一侧设有折弯板(35),所述折弯板(35)贴合于无人机和第二安装板(34)的连接处,所述折弯板(35)上螺纹连接有多根安装螺丝(36),且多根安装螺丝(36)的一端分别与无人机(5)和第二安装板(34)螺纹连接。
技术总结
本发明公开了一种智能巡检机器人,包括两块安装竖板,两块所述安装竖板上固定连接有同一块连接板,所述连接板上固定连接有固定板,所述固定板上固定连接有多块支撑块。本装置将无人机和巡检设备结合在一起,从而方便工作人员将巡检设备放置到高压线缆上,同时装置中的各个部分可以根据实际情况从而移动,这样就方便工作人员对巡检设备的检修和收纳,同时工作人员再驱动装置的时候,不仅仅可以使用第一电机进行驱动,还能够使用无人机对其进行驱动,进一步的保证了驱动的稳定性,同时工作人员能够将无人机进行拆卸,这样就可以使无人机单独使用,避免了无人机的浪费,从而提高了资源的利用率。
技术研发人员:王影,周敬勇,穆文静,吴睿,董帮源,王勇
受保护的技术使用者:合肥职业技术学院
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!