基于变频器的定位控制方法、设备、系统及存储介质与流程
本发明涉及变频控制,尤其涉及一种基于变频器的定位控制方法、设备、系统及存储介质。
背景技术:
1、随着自动化控制产品的发展,移载机、转运机等自动化设备中涉及的定位控制技术,其实现方式有很多种。利用变频器的多段速调速来实现定位控制的方式,存在接线复杂、功能码设定繁琐的问题,容易导致增加整个定位系统的复杂度和成本;而且,对现场操作员技术要求较高,不适用一些对现场操作员技术要求较低的场合。
技术实现思路
1、本发明的主要目的在于:提供一种基于变频器的定位控制方法、设备、系统及存储介质,旨在解决现有技术中定位控制方式存在现场操作复杂,导致增加定位系统复杂度和成本的技术问题。
2、为实现上述目的,本发明采用如下技术方案:
3、第一方面,本发明提供了一种基于变频器的定位控制方法,变频器用于驱动目标装置在导轨两端之间作往返运动,导轨的两端均设置有接近开关,方法包括:
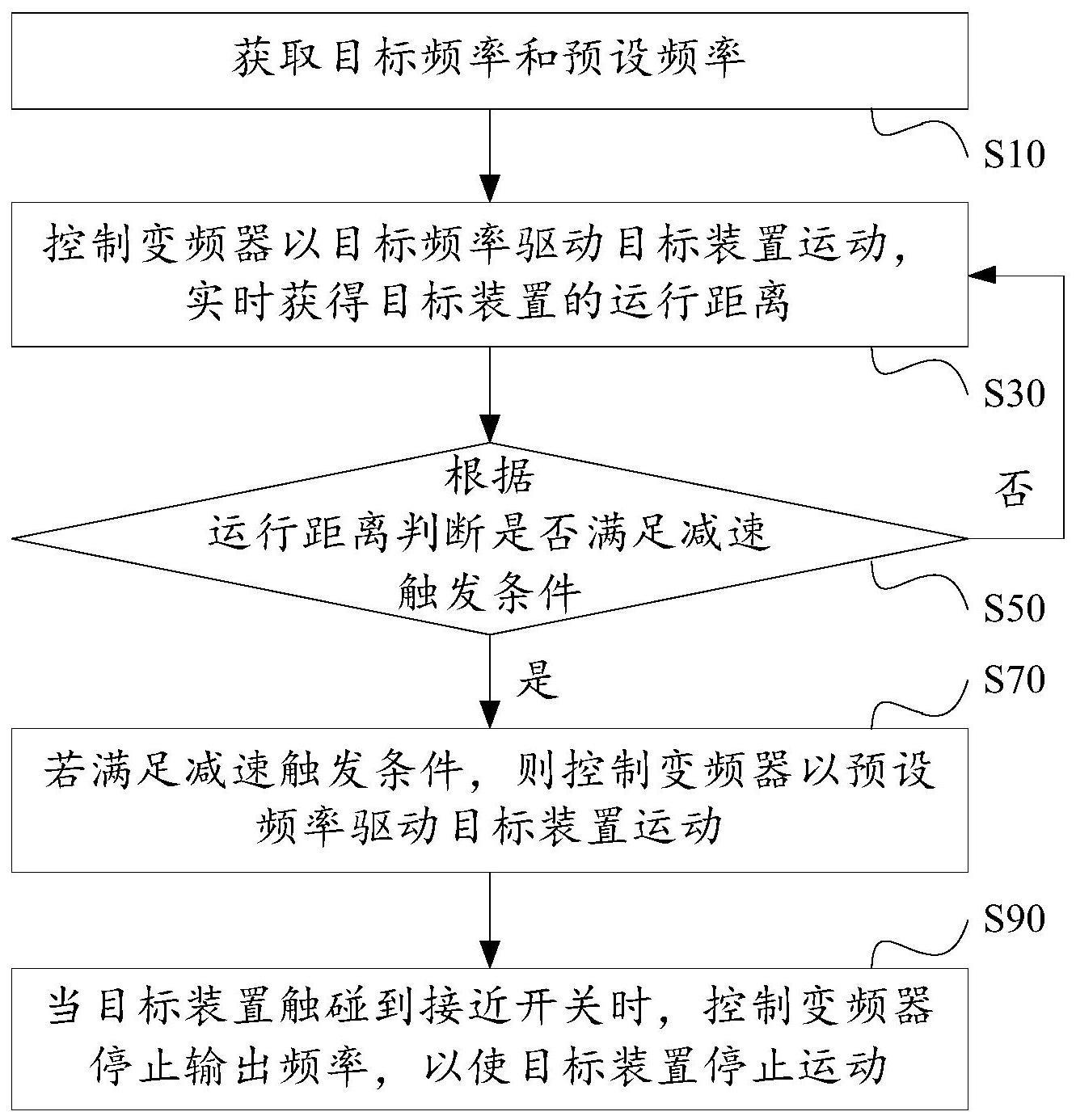
4、获取目标频率和预设频率,其中,预设频率小于目标频率;
5、控制变频器以目标频率驱动目标装置运动,实时获得目标装置的运行距离;
6、根据运行距离判断是否满足减速触发条件,其中,减速触发条件基于导轨两端的端点距离、目标装置的减速距离和预设的修正距离确定;
7、若满足减速触发条件,则控制变频器以预设频率驱动目标装置运动;
8、当目标装置触碰到接近开关时,控制变频器停止输出频率,以使目标装置停止运动。
9、可选地,上述基于变频器的定位控制方法中,根据运行距离判断是否满足减速触发条件的步骤之前,方法还包括:
10、当目标装置位于导轨两端的任意一端时,控制变频器以预设频率驱动目标装置运动;
11、当目标装置触碰到导轨两端中另一端的接近开关时,控制变频器停止输出频率,得到端点距离;
12、根据端点距离、减速距离和修正距离,确定减速触发条件。
13、可选地,上述基于变频器的定位控制方法中,根据端点距离、减速距离和修正距离,确定减速触发条件,包括:
14、将端点距离减去减速距离,并减去修正距离得到的距离,确定为减速触发条件的参考距离;
15、根据运行距离判断是否满足减速触发条件,包括:
16、判断运行距离是否大于或等于参考距离;
17、若是,则判定满足减速触发条件,否则,判定为不满足减速触发条件。
18、可选地,上述基于变频器的定位控制方法中,当目标装置触碰到导轨两端中另一端的接近开关时,控制变频器停止输出频率,得到端点距离的步骤之后,方法还包括:
19、获得目标装置的过冲距离;
20、根据端点距离、减速距离和修正距离,确定减速触发条件,包括:
21、将端点距离减去减速距离,并减去修正距离得到的距离与过冲距离的和,确定为减速触发条件的参考距离。
22、可选地,上述基于变频器的定位控制方法中,根据端点距离、减速距离和修正距离,确定减速触发条件的步骤之前,方法还包括:
23、根据过冲距离和目标装置的工作效率,动态调整修正距离。
24、可选地,上述基于变频器的定位控制方法中,变频器包括两个端子;
25、当目标装置触碰到接近开关时,控制变频器停止输出频率,以使目标装置停止运动的步骤之后,方法还包括:
26、切换两个端子的组合给定方向,并返回控制变频器以目标频率驱动目标装置运动,得到目标装置的运行距离的步骤,以驱动目标装置在导轨上作反向运动,实现目标装置在导轨上的往返运动。
27、可选地,上述基于变频器的定位控制方法中,控制变频器以目标频率驱动目标装置运动,实时获得目标装置的运行距离的步骤中,运行距离的计算式为:
28、
29、其中,lt表示运行距离,fout表示变频器的输出频率,t表示变频器输出输出频率fout的时长。
30、第二方面,本发明提供了一种定位控制设备,设备包括处理器和存储器,存储器中存储有定位控制程序,定位控制程序被处理器执行时,实现如上述的基于变频器的定位控制方法。
31、第三方面,本发明提供了一种定位控制系统,系统包括:
32、目标装置;
33、电机,用于驱动目标装置在导轨两端之间作往返运动,导轨的两端均设置有接近开关;
34、变频器,用于输出频率给电机,以驱动目标装置运动;
35、如上述的定位控制设备。
36、第四方面,本发明提供了一种计算机可读存储介质,存储介质上存储有计算机程序,计算机程序被一个或多个处理器执行时,实现如上述的基于变频器的定位控制方法。
37、本发明提供的上述一个或多个技术方案,可以具有如下优点或至少实现了如下技术效果:
38、本发明提出的一种基于变频器的定位控制方法、设备、系统及存储介质,在目标装置作往返运动的导轨两端设置接近开关,通过控制变频器以目标频率驱动目标装置运动,实时获得目标装置的运行距离,在根据该运行距离判定满足减速触发条件时,控制变频器以小于目标频率的预设频率驱动目标装置运动,进行提前减速,然后在目标装置触碰到接近开关时,控制变频器停止输出频率,使目标装置停止运动,实现一次完整的导轨单程运动。本发明通过变频器输出频率的变化来调整目标装置减速模式,提前从正常速度减速到较慢的速度,再缓慢触碰接近开关,使目标装置可以更准确地停在接近开关处,实现精确定位;并且,直接控制变频器输出频率,不需要连接过多接线,操作简单,降低了定位控制系统的复杂度和成本,提高了定位控制系统的兼容性和可靠性等性能。
技术特征:
1.一种基于变频器的定位控制方法,所述变频器用于驱动目标装置在导轨两端之间作往返运动,其特征在于,所述导轨的两端均设置有接近开关,所述方法包括:
2.如权利要求1所述的基于变频器的定位控制方法,其特征在于,所述根据所述运行距离判断是否满足减速触发条件的步骤之前,所述方法还包括:
3.如权利要求2所述的基于变频器的定位控制方法,其特征在于,所述根据所述端点距离、所述减速距离和所述修正距离,确定所述减速触发条件,包括:
4.如权利要求2所述的基于变频器的定位控制方法,其特征在于,所述当所述目标装置触碰到所述导轨两端中另一端的接近开关时,控制所述变频器停止输出频率,得到所述端点距离的步骤之后,所述方法还包括:
5.如权利要求4所述的基于变频器的定位控制方法,其特征在于,所述根据所述端点距离、所述减速距离和所述修正距离,确定所述减速触发条件的步骤之前,所述方法还包括:
6.如权利要求1所述的基于变频器的定位控制方法,其特征在于,所述变频器包括两个端子;
7.如权利要求1所述的基于变频器的定位控制方法,其特征在于,所述控制所述变频器以所述目标频率驱动所述目标装置运动,实时获得所述目标装置的运行距离的步骤中,所述运行距离的计算式为:
8.一种定位控制设备,其特征在于,所述设备包括处理器和存储器,所述存储器上存储有定位控制程序,所述定位控制程序被所述处理器执行时,实现如权利要求1至7中任一项所述的基于变频器的定位控制方法。
9.一种定位控制系统,其特征在于,所述系统包括:
10.一种计算机可读存储介质,其特征在于,所述存储介质上存储有计算机程序,所述计算机程序被一个或多个处理器执行时,实现如权利要求1至7中任一项所述的基于变频器的定位控制方法。
技术总结
本发明公开了一种基于变频器的定位控制方法、设备、系统及存储介质,涉及变频控制技术领域,在目标装置作往返运动的导轨两端设置有接近开关,该方法包括:获取目标频率和预设频率;控制变频器以目标频率驱动目标装置运动,实时获得目标装置的运行距离;根据运行距离判断是否满足减速触发条件;若满足减速触发条件,则控制变频器以预设频率驱动目标装置运动;当目标装置触碰到接近开关时,控制变频器停止输出频率,以使目标装置停止运动。本发明解决了现有技术存在现场操作复杂,导致增加定位系统复杂度和成本的问题,实现了通过变频器输出频率的变化来调整目标装置减速模式,达到提高定位控制系统性能的效果。
技术研发人员:张嘉良,王炜,曹振涛
受保护的技术使用者:深圳市易驱电气有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!