一种基于储能电站的低碳电力系统振荡抑制方法
本发明属于电力系统稳定控制,具体涉及一种基于储能电站的低碳电力系统振荡抑制方法。
背景技术:
1、电力系统低碳化是实现能源绿色低碳转型发展的关键。为实现碳达峰与碳中和目标,全国碳排放权交易市场将发电行业作为首个纳入该市场的行业,年度碳排放量达到一定规模的火电厂将参与碳排放权交易。这意味着随着碳配额约束趋紧,高碳排放的火电在电力系统能源供给侧的占比将逐步下降,低碳或零碳排放的风电、太阳能发电在电力系统能源供给侧的占比将逐步上升。为保证电力实时平衡和安全可靠供电,风电、太阳能发电的强随机性和高波动性必须由储能电站的跨时间尺度电力平衡来解决。因此,当前技术最成熟、经济性最优、最具大规模开发条件的抽水蓄能电站以及快响应速度的电化学储能电站等已成为低碳电力系统重要的储能型电源,在跨时间尺度电力平衡、低碳电力系统稳定控制等方面发挥着越来越重要的作用。
2、由于低碳电力系统中储能环节的引入,使得低碳电力系统稳定控制由源网荷的电力平衡转变为源网荷储的电力平衡,稳定控制机理更加复杂,影响大电网安全稳定运行的低频功率振荡发生风险显著增大,如何充分发挥储能电站在低碳电力系统稳定控制中的作用迫切需要进行研究,对确保电力系统安全稳定运行、保障电力系统低碳化目标如期实现具有十分重要的意义。目前,电力调度机构对储能电站作用主要定位在:一是调峰,即在负荷需求显著超出电源供给时,储能电站进入发电模式,为电力系统提供新的电源供给,满足负荷需求;二是清洁能源消纳,即在负荷需求不足但是风电、太阳能发电等清洁能源发电满发或大发时,储能电站进入充电模式,为电力系统存储过剩电能,保证电力实时平衡和最大限度消纳清洁能源。但是,电力调度机构对于如何利用储能电站进行低频功率振荡抑制、确保大电网安全稳定运行方面正处于探索阶段,尚无有效的、成熟的、标准化的方法和技术手段。
技术实现思路
1、本发明的目的是解决现有技术存在的上述问题,提供一种基于储能电站的低碳电力系统振荡抑制方法,通过构建振荡模式、储能电站、阻尼控制器参数三者关联关系,并通过对实时采集的振荡模式与知识库中已知振荡模式进行匹配,选择合适的储能电站及阻尼控制器参数对低频功率振荡进行抑制且使之满足预定的阻尼性能,该方法为储能电站进行电力系统振荡抑制提供了有效的方法和手段,有助于提升低碳电力系统安全稳定控制水平。
2、为实现以上目的,本发明提供了以下技术方案:
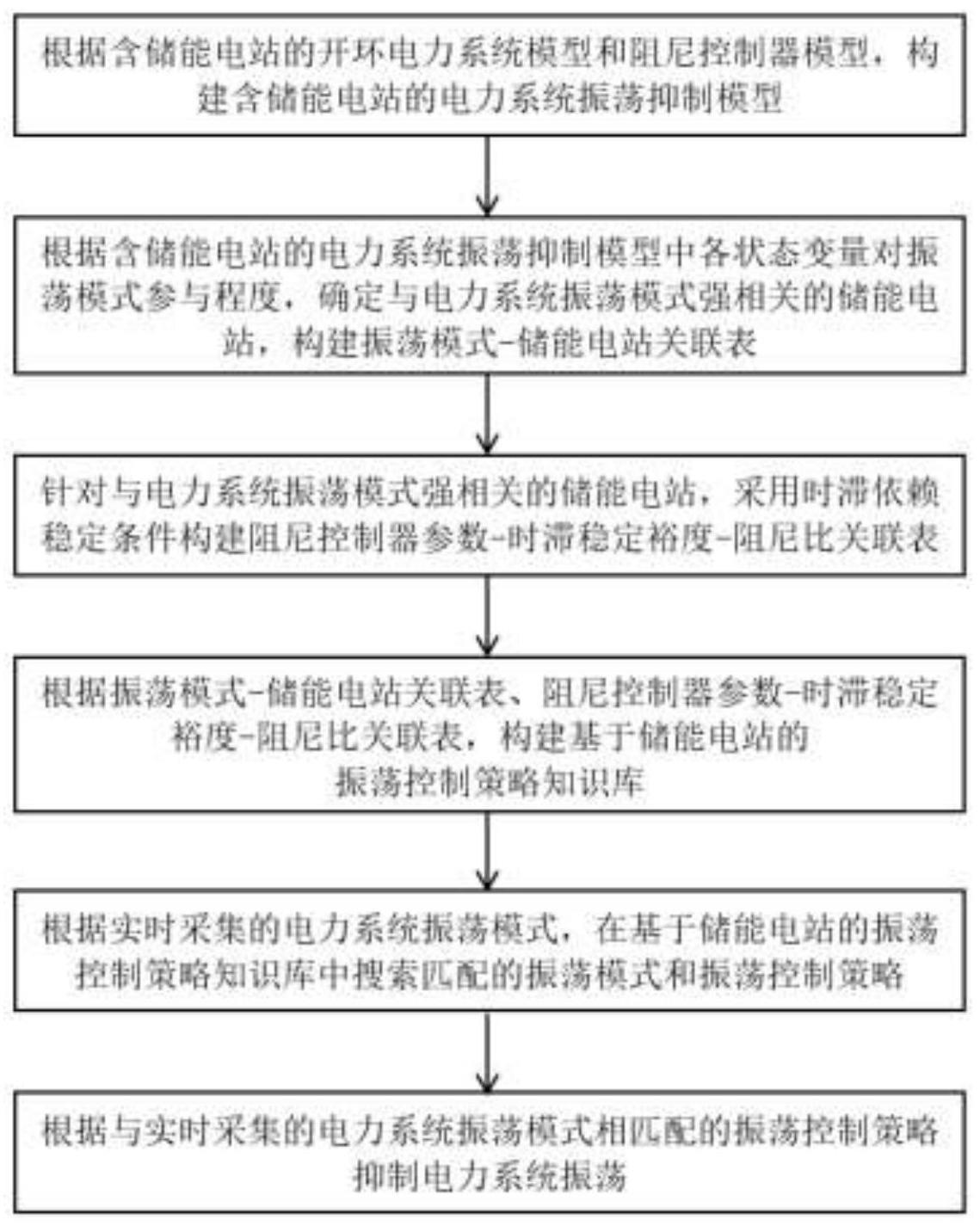
3、一种基于储能电站的低碳电力系统振荡抑制方法,分为以下步骤:
4、s1、根据含储能电站的开环电力系统模型和阻尼控制器模型,构建含储能电站的电力系统振荡抑制模型。
5、s1-1、含储能电站的开环电力系统模型描述如下:
6、
7、其中,t表示时间,xo(t)、wo(t)、uo(t)和yo(t)分别为开环电力系统的状态变量、代数变量、输入变量和输出变量,为开环电力系统的状态变量对时间t的导数,f(·,·,·)为开环电力系统的动态函数关系,由开环电力系统中的发电机、励磁器、调速器等元件的动态方程组成,其中开环电力系统的发电机动态方程由常规电站发电机动态方程和储能电站发电机动态方程组成,g(·,·,·)为开环电力系统的代数函数关系,由开环电力系统中的潮流方程组成,o(·,·,·)为开环电力系统的输出函数关系,由阻尼控制器的输入信号和输出信号决定。
8、储能电站发电机动态方程采用同步发电机模型或虚拟同步发电机模型。同步发电机模型参见《现代电力系统分析》(王锡凡、方万良、杜正春,科学出版社,2011年)。虚拟同步发电机模型为:
9、
10、其中,ωv、和分别为储能电站接入点处电网电角速度、电网电角速度参考值和电网电角速度导数,pv和qv分别为虚拟同步发电机输出的有功功率和无功功率,和分别为虚拟同步发电机输出的有功功率参考值和无功功率参考值,jv和kv分别为虚拟同步发电机的虚拟转动惯量和虚拟励磁调节惯性系数,dp和dq分别为虚拟同步发电机的阻尼系数和无功-电压下垂系数,uv和分别为储能电站接入点处电网电压和电网电压参考值,ev和θv分别为虚拟同步发电机的幅值和相位,和分别为虚拟同步发电机的幅值和相位的导数。
11、将含储能电站的开环电力系统模型在电力系统平衡点线性化,得到含储能电站的开环电力系统线性化模型:
12、
13、其中,δxo(t)为开环电力系统的状态变量增量,ao,bo和co分别为开环电力系统的状态矩阵、输入矩阵和输出矩阵。
14、s1-2、阻尼控制器的传递函数模型为:
15、
16、其中,yc(s)为阻尼控制器输出信号的拉普拉斯变换值,uc(s)为阻尼控制器输入信号的拉普拉斯变换值,kc为阻尼控制器增益,tw为阻尼控制器隔直环节时间常数,s为拉普拉斯变换的复频率,t1、t2、t3和t4分别为阻尼控制器超前滞后环节时间常数。
17、将阻尼控制器的传递函数模型转化为状态空间形式,得到阻尼控制器的状态空间模型:
18、
19、其中,xc(t)为阻尼控制器的状态变量,uc(t)为阻尼控制器的输入变量,yc(t)为阻尼控制器的输出变量,为阻尼控制器的状态变量对时间t的导数,ac,bc,cc和dc分别为阻尼控制器的状态矩阵、输入矩阵、输出矩阵和前馈矩阵。
20、s1-3、根据含储能电站的开环电力系统与阻尼控制器的连接关系,得到含储能电站的开环电力系统输入、输出与阻尼控制器的输入、输出的连接关系模型:
21、
22、其中,h(t)为电力系统输出信号传输延迟,h(t)满足
23、
24、τ表示电力系统输出信号传输延迟上界即时滞稳定裕度,表示电力系统输出信号传输延迟的变化率,μ表示电力系统输出信号传输延迟的变化率上界。
25、联立含储能电站的开环电力系统线性化模型和阻尼控制器的状态空间模型,得到含储能电站的电力系统振荡抑制模型:
26、
27、x(t)=[δxo(t) xc(t)]t,
28、
29、
30、其中,x(t)为电力系统振荡抑制模型的状态变量,由开环电力系统的状态变量增量δxo(t)和阻尼控制器的状态变量xc(t)组成;a为电力系统振荡抑制模型的状态矩阵,ad为电力系统振荡抑制模型的时滞矩阵;
31、s2、根据含储能电站的电力系统振荡抑制模型中各状态变量对振荡模式参与程度,确定与电力系统振荡模式强相关的储能电站,构建振荡模式-储能电站关联表。
32、s2-1、采用参与因子矩阵描述状态变量对振荡模式参与程度。
33、参与因子矩阵p如下:
34、p=[p1,p2,…,pi,…,pn],
35、pi为参与因子矩阵p的第i个列向量:
36、
37、其中,i表示矩阵a+ad的第i个特征值编号,n表示矩阵a+ad的特征值个数,k表示电力系统振荡抑制模型状态变量x(t)的第k个状态变量编号,k的取值范围为1,2,…,n;对矩阵a+ad进行特征值、右特征向量、左特征向量计算以确定pi,具体如下:φki表示第i个特征值中第k个状态变量参与程度,为矩阵a+ad的第i个右特征向量φi的第k个元素,φi通过下式计算得到:(a+ad)φi=λiφi,λi为矩阵a+ad第i个特征值;ψik表示第k个状态变量对第i个特征值的贡献程度,为矩阵a+ad的第i个左特征向量ψi的第k个元素,ψi通过下式计算得到:ψi(a+ad)=ψiλi。
38、s2-2、根据矩阵a+ad的第i个特征值λi确定待抑制的电力系统振荡模式λ及与其强相关的储能电站。
39、矩阵a+ad的第i个特征值λi为复数,将λi写为复数形式:λi=σi±jωi,其中σi为λi的实部,ωi为λi的虚部,j为复数的虚部符号。特征值λi的阻尼比ξi计算如下:
40、
41、若σi大于给定的阻尼因子σ0,或者ξi大于给定的阻尼比ξ0,则λi对应的振荡模式能够自动平息,λi不作为待抑制的电力系统振荡模式λ;若σi小于给定的阻尼因子σ0,或者ξi小于给定的阻尼比ξ0,则将λi确定为待抑制的电力系统振荡模式λ;
42、当状态变量编号k′同时满足如下两个条件时:
43、
44、选取第k′个状态变量对应的储能电站作为抑制电力系统振荡的机组,其中max{·,…,·}表示取最大值函数;
45、s2-3、根据振荡模式与储能电站的映射关系构建振荡模式-储能电站关联表。
46、待抑制的电力系统振荡模式λ与第k′个状态变量对应的储能电站之间的映射关系mapping_1定义为:
47、mapping_1:其中,表示映射关系符号。根据mapping_1得到如下元素:
48、(待抑制的电力系统振荡模式λ,第k′个状态变量对应的储能电站),并将其作为振荡模式-储能电站关联表中的一行。矩阵a+ad有n个特征值,对于矩阵a+aa的第i个特征值λi,当i取值从1到n时,就可以得到具有多行的振荡模式-储能电站关联表。
49、s3、针对与电力系统振荡模式强相关的储能电站,采用时滞依赖稳定条件构建阻尼控制器参数-时滞稳定裕度-阻尼比关联表。
50、s3-1、根据含储能电站的电力系统振荡抑制模型采用时滞依赖稳定条件计算得到时滞稳定裕度τ,同时根据矩阵a+ad计算得到阻尼比ξi。
51、采用的时滞依赖稳定条件为:
52、给定时滞稳定裕度τ和电力系统输出信号传输延迟的变化率上界μ,若存在矩阵和合适维数矩阵n1、n2使得以下线性矩阵不等式成立:
53、
54、
55、其中,
56、
57、
58、
59、则系统稳定。
60、时滞稳定裕度τ的计算通过matlab实现,计算中电力系统输出信号传输延迟的变化率上界μ根据实际电力系统输出信号采集点与阻尼控制器之间传输延迟的最大变化率事先给定,μ取值介于0到1之间,具体请参考matlablmi工具箱说明。由于含储能电站的电力系统振荡抑制模型中状态矩阵a和时滞矩阵ad是随阻尼控制器的状态矩阵ac、输入矩阵bc、输出矩阵cc和前馈矩阵dc而变化的,因此通过此方式计算得到的时滞稳定裕度τ是与参数为(kc,tw,t1,t2,t3,t4)的阻尼控制器对应的;同时根据矩阵a+ad计算得到阻尼比ξi,此时ξi也是与参数为(kc,tw,t1,t2,t3,t4)的阻尼控制器对应的。
61、s3-2、根据阻尼控制器参数及s3-1计算得到的时滞稳定裕度τ和阻尼比ξi,构建阻尼控制器参数与时滞稳定裕度τ、阻尼比ξi的映射关系。
62、阻尼控制器参数与时滞稳定裕度τ、阻尼比ξi的映射关系mapping_2定义为:
63、mapping_2:根据mapping_2得到如下元素:
64、(kc,tw,t1,t2,t3,t4,τ,ξi),
65、并将其作为阻尼控制器参数-时滞稳定裕度-阻尼比关联表中的一行。
66、s3-3、根据阻尼控制器参数与时滞稳定裕度、阻尼比的映射关系,构建阻尼控制器参数-时滞稳定裕度-阻尼比关联表。
67、调整阻尼控制器参数(kc,tw,t1,t2,t3,t4)的取值,得到与该阻尼控制器参数(kc,tw,t1,t2,t3,t4)取值对应的以传递函数描述的阻尼控制器和以状态空间描述的阻尼控制器,获得与以状态空间描述的阻尼控制器对应的ac,bc,cc和dc取值,进而得到与该阻尼控制器参数(kc,tw,t1,t2,t3,t4)取值对应的含储能电站的电力系统振荡抑制模型的状态矩阵a和时滞矩阵ad,之后以该状态矩阵a和时滞矩阵ad为基础,采用时滞依赖稳定条件和阻尼比计算公式分别得到与该阻尼控制器参数(kc,tw,t1,t2,t3,t4)取值对应的时滞稳定裕度τ和阻尼比ξi,推导和计算过程描述如下:
68、(kc,tw,t1,t2,t3,t4)→(ac,bc,cc,dc)→(a,ad)→(τ,ξi)
69、其中,→表示推导关系符号。
70、当阻尼控制器参数(kc,tw,t1,t2,t3,t4)有多个取值时,将得到多个mapping_2元素(kc,tw,t1,t2,t3,t4,τ,ξi),并将其作为阻尼控制器参数-时滞稳定裕度-阻尼比关联表中的多行,形成阻尼控制器参数-时滞稳定裕度-阻尼比关联表。
71、s4、根据振荡模式-储能电站关联表、阻尼控制器参数-时滞稳定裕度-阻尼比关联表,构建基于储能电站的振荡控制策略知识库。
72、基于储能电站的振荡控制策略知识库由两部分组成,一部分为s2中得到的振荡模式-储能电站关联表,另一部分为s3中得到的阻尼控制器参数-时滞稳定裕度-阻尼比关联表。基于储能电站的振荡控制策略知识库搜索过程如下:首先给定待抑制的电力系统振荡模式λ;然后从振荡模式-储能电站关联表得到与待抑制的电力系统振荡模式λ强相关的储能电站即第k′个状态变量对应的储能电站;最后根据该储能电站,从阻尼控制器参数-时滞稳定裕度-阻尼比关联表得到与时滞稳定裕度τ和阻尼比ξi对应的阻尼控制器参数(kc,tw,t1,t2,t3,t4)。采用此方式获得的阻尼控制器参数(kc,tw,t1,t2,t3,t4)在抑制电力系统振荡模式λ时满足时滞稳定裕度τ和阻尼比ξi的阻尼性能要求。
73、s5、根据实时采集的电力系统振荡模式,在基于储能电站的振荡控制策略知识库中搜索匹配的振荡模式和振荡控制策略。
74、s5-1、在基于储能电站的振荡控制策略知识库中,将实时采集的电力系统振荡模式λ′与待抑制的电力系统振荡模式λ进行比较,若λ′∈(λ,ρ),则确定待抑制的电力系统振荡模式为λ,其中η(λ,ρ)表示以为λ中心、半径为ρ的圆形邻域,ρ通常取0.01;
75、s5-2、在基于储能电站的振荡控制策略知识库中,根据待抑制的电力系统振荡模式λ,从振荡模式-储能电站关联表得到与待抑制的电力系统振荡模式λ强相关的储能电站即第k′个状态变量对应的储能电站;
76、s5-3、在基于储能电站的振荡控制策略知识库中,根据第k′个状态变量对应的储能电站和阻尼控制器参数-时滞稳定裕度-阻尼比关联表,采取以下方式确定阻尼控制器参数(kc,tw,t1,t2,t3,t4):
77、方式①:若只给定时滞稳定裕度τ0,则选择时滞稳定裕度τ大于给定的时滞稳定裕度τ0的阻尼控制器参数(kc,tw,t1,t2,t3,t4)作为待设置的阻尼控制器参数;此方式表示待设置的阻尼控制器若采用此参数,在阻尼控制器输入信号传输时滞小于或等于τ0情形下,电力系统仍能维持稳定。
78、方式②:若只给定阻尼比ξ0,则选择阻尼比ξi大于给定阻尼比ξ0的阻尼控制器参数作为待设置的阻尼控制器参数(kc,tw,t1,t2,t3,t4);此方式表示待设置的阻尼控制器若采用此参数,电力系统能以阻尼比大于或等于ξ0的阻尼性能趋于稳定。
79、方式③:若给定时滞稳定裕度τ0和给定阻尼比ξ0,则选择时滞稳定裕度τ大于给定的时滞稳定裕度τ0、且阻尼比ξi大于给定阻尼比ξ0的阻尼控制器参数(kc,tw,t1,t2,t3,t4)作为待设置的阻尼控制器参数;此方式表示待设置的阻尼控制器若采用此参数,电力系统能以阻尼比大于或等于ξ0的阻尼性能趋于稳定,即使阻尼控制器输入信号传输时滞达到τ0时电力系统仍能维持稳定。
80、通过在基于储能电站的振荡控制策略知识库中搜索,得到与待抑制的电力系统振荡模式λ强相关的储能电站及阻尼控制器参数(kc,tw,t1,t2,t3,t4),构成与实时采集的电力系统振荡模式λ′相匹配的振荡控制策略。该振荡控制策略是电力调度机构对电力系统振荡进行抑制的决策依据。
81、s6、根据与实时采集的电力系统振荡模式λ′相匹配的振荡控制策略抑制电力系统振荡。从与实时采集的电力系统振荡模式λ′相匹配的振荡控制策略中获取用于抑制电力系统振荡的储能电站信息和阻尼控制器参数值(kc,tw,t1,t2,t3,t4),然后将阻尼控制器参数更新为与实时采集的电力系统振荡模式λ′相匹配的振荡控制策略中的阻尼控制器参数值(kc,tw,t1,t2,t3,t4),最后储能电站与参数已更新的阻尼控制器联动,抑制电力系统振荡。
82、与现有技术相比,本发明的有益效果为:
83、一是将储能电站纳入电力系统振荡抑制模型中,符合低碳电力系统储能电站不断增加的发展趋势,为储能电站增加了除调峰、新能源消纳功能以外的第三大功能——稳定控制功能,为储能电站抑制电力系统振荡提供了技术支撑和方法手段;
84、二是在储能电站抑制电力系统振荡的性能要求上既包括了阻尼比,还包括了时滞稳定裕度,相比传统的仅基于阻尼比的振荡抑制性能要求,所设计的振荡控制策略具有更广的适应范围,使得储能电站在抑制电力系统振荡时即使存在信号传输延迟也能达到预期要求。
85、因此,本发明实现了低碳电力系统中储能电站对电力系统振荡的抑制,为更好地发挥储能电站的稳定控制功能提供了有效的方法,有助于提升低碳电力系统安全稳定控制水平,确保低碳电力系统安全稳定运行。
- 还没有人留言评论。精彩留言会获得点赞!