输电线固定装置、断股修复机器人及机器人使用方法与流程
本发明涉及输电线修复,特别是一种输电线固定装置、断股修复机器人及机器人使用方法。
背景技术:
1、现有的一些输电线断股修复机器人,其断股修复机构包括绕线装置和固定装置,固定装置包括两个可开合的固定分座和安装在固定分座的夹紧分体,夹紧分体在两个固定分座合并时构成夹紧输电线的夹紧盘,两个夹紧分体形成的夹紧盘具有将护线条夹紧于输电线上的夹孔。当进行绕线作业时,固定装置位于待绕线的输电线区段的始端,两个固定分座先合并,使两个夹紧分体形成夹紧盘,输电线和护线条均穿过夹孔,实现将护线条夹定在输电线上。然后绕线装置将护线条缠绕在输电线上。当前阶段绕线作业完毕后,两个固定分座相分离,夹紧盘分离成两个夹紧分体离开输电线。现有的固定装置虽然能在绕线时将护线条夹定在输电线上,但单纯靠两固定分座相闭合的作用力对护线条的固定效果相对较弱,不利于护线条牢固地缠绕在输电线上。
技术实现思路
1、针对上述缺陷,本发明第一目的在于提出一种便于夹紧盘脱落的输电线固定装置。本发明第二目的在于公开应用其输电线固定装置的断股修复机器人。本发明第三目的在于公开该断股修复机器人的使用方法。
2、为达此目的,本发明采用以下技术方案:
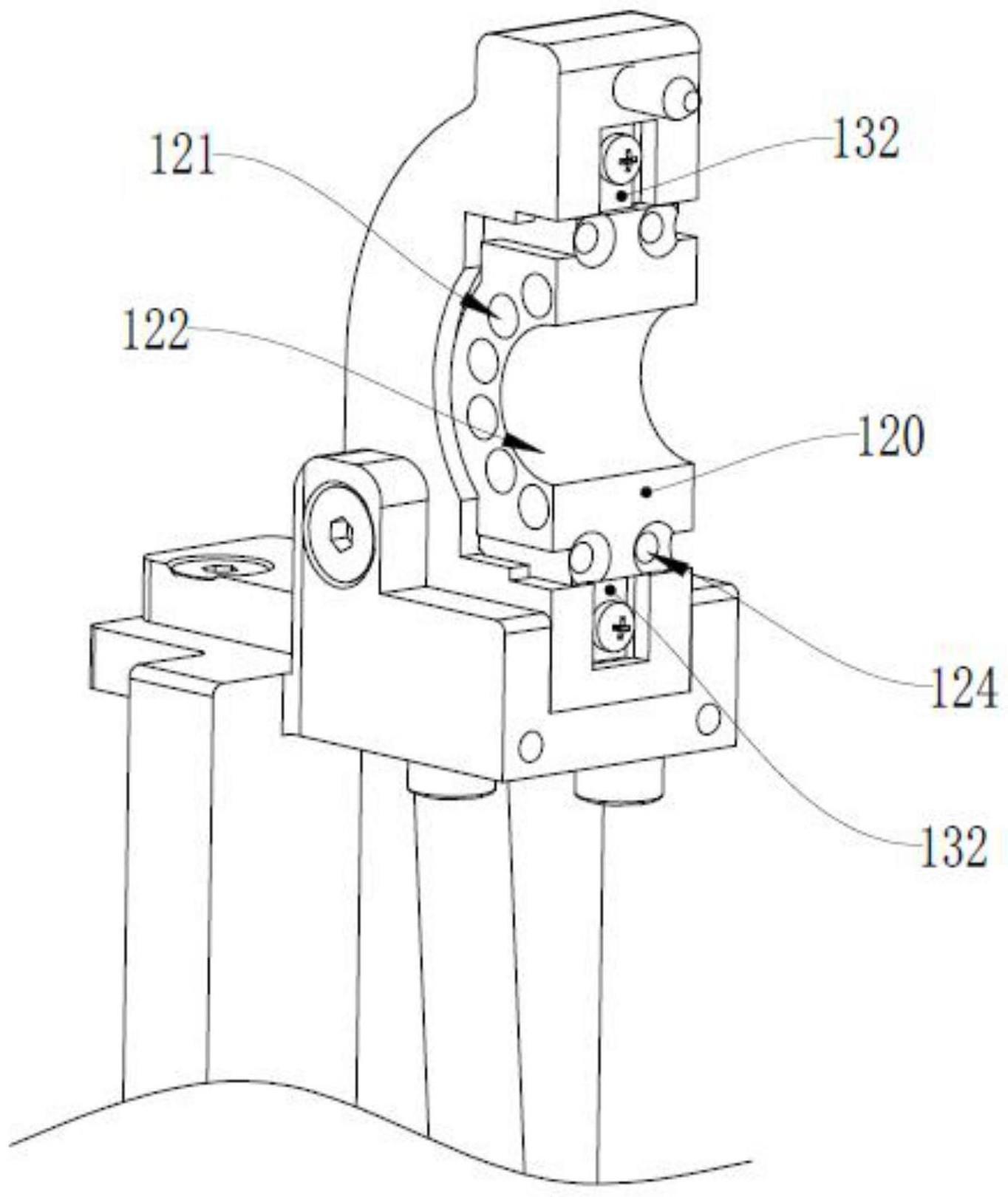
3、本发明第一方面公开了一种输电线固定装置,用于断股修复,输电线固定装置包括第一闭合驱动组件、两个夹紧分体和两个固定分座,两个固定分座左右对称设置,第一闭合驱动组件与两个固定分座传动连接,以驱动两个固定分座在左右方向相互靠近和远离;两个固定分座均设有安装缺口,两个安装缺口的开口左右相对,两个夹紧分体的中部均设有夹紧缺口,两个夹紧分体均设有若干个供护线条穿过的第一护线条通孔,两个夹紧分体一一对应地设置在两个安装缺口内;两个夹紧分体在两个固定分座合并后组成夹紧盘,两个夹紧缺口形成供输电线穿过的夹紧通孔;两个安装缺口的顶部和底部均设有紧定部,紧定部与夹紧分体的外壁抵接,当固定分座相互靠近时,推动夹紧分体靠近;当固定分座远离时,紧定部脱离夹紧分体。
4、进一步,本发明第一方面中,紧定部为可形变的拨片,拨片可拆卸的固定在安装固定分座;安装缺口的两个拨片上下相对,夹紧分体的顶部和底部均设有与拨片对应的卡接缺口,两个拨片靠近夹紧分体的一端均延伸至卡接缺口内。
5、进一步,本发明第一方面中,第一闭合驱动组件包括闭合驱动件和传动丝杆;传动丝杆左右横向设置,传动丝杆的一端与闭合驱动件的驱动端传动连接,使得传动丝杆可绕自身轴线正反转;传动丝杆的杆体上设有两个外螺纹部,且两个外螺纹部旋向相反设置;两个固定分座的底部设有内螺纹部;通过内螺纹部与外螺纹部配合连接,使得两个固定分座的底部套设于传动丝杆。
6、进一步,本发明第一方面中,一个夹紧分体设有定位销钉,另一个夹紧分体设有与定位销钉相应配合的定位销孔。
7、本发明第二方面公开了一种断股修复机器人,包括装载平台、越障行走机构、绕线机构和如权利要求1-4任一项的输电线固定装置;绕线机构、输电线固定装置和越障行走机构从前往后依次间隔地设置在装载平台上;越障行走机构用于可跨越夹紧盘地行走于输电线上;绕线机构前后滑动地设置在装载平台上;绕线机构包括绕线盘、绕线盘底座和线盘转动组件;绕线盘底座可前后移动地设置在装载平台上,线盘转动组件设置在绕线盘底座上,线盘转动组件与绕线盘传动连接,以驱动绕线盘绕其中心沿着输电线绕动的方向旋转;绕线盘的中心设有供输电线穿过的绕线通孔,绕线盘设有若干个供护线条穿过的第二护线条通孔,若干个第二护线条通孔沿绕线通孔的圆周方向间隔均匀地排列设置在绕线盘上;线盘转动组件包括第一齿轮、第二齿轮和转动驱动件,第一齿轮可转动地设置绕线盘底座上,绕线盘中心重合地设置在第一齿轮上,转动驱动件设置在绕线底盘座上,转动驱动件的输出轴与第二齿轮传动连接,以驱动第二齿轮转动,第二齿轮与第一齿轮啮合。
8、进一步,在本发明的第二方面中,第一齿轮的端面设有若干个连接孔;绕线盘设有与连接孔一一对应的贯穿孔,贯穿孔的孔径大于连接孔的孔径;绕线盘与第一齿轮之间通过连接件连接,连接件沿轴向方向依次设有连接部、凸肩部和头部,连接部穿过通孔与连接孔固定连接,凸肩部间隙配合地设置在通孔内,凸肩部远离连接部的一端凸出贯穿孔,以使头部与绕线盘的端面间隔设置,头部的直径大于贯穿孔的内径。
9、进一步,在本发明的第二方面中,绕线盘底座包括第二闭合驱动组件和两个线盘分座,第二闭合驱动组件可前后移动地设置在装载平台上,两个线盘分座左右对称设置,第二闭合驱动组件与两个线盘分座传动连接,以驱动两个线盘分座在左右方向相互靠近和相互远离;两个线盘分座均设有半圆滑道,两个半圆滑道在两个线盘分座合并靠拢时形成环形滑道;第一齿轮由两个半圆齿轮拼接而成,两个半圆齿轮一一对应地与半圆环连接,两个半圆齿轮在两个线盘分座合并靠拢时形成第一齿轮;两个半圆齿轮的背面均设有半圆滑台,两个半圆滑台与同侧的半圆滑道滑动配合,两个半圆滑台在两个线盘分座合并靠拢时形成圆形的转动滑台;绕线盘由两个半圆绕线盘拼接而成,两个半圆绕线盘的圆心处设有半圆缺口,两个半圆绕线盘一一对应地与两个半圆齿轮连接,两个半圆绕线盘在两个线盘分座合并靠拢时形成绕线盘,两个半圆缺口形成供输电线通过的绕线通孔。
10、进一步,在本发明的第二方面中,两个半圆齿轮于轮齿处均设有一个检测孔,两个线盘分座均设有一个光电开关,当第一齿轮位于可开合位置时,两个光电开关的检测端与同侧的检测孔位置同时相对。
11、进一步,在本发明的第二方面中,第一齿轮与绕线盘底座之间设有锁定机构,锁定机构用于锁定第一齿轮在绕线盘底座上;锁定机构包括电磁铁和铁块,电磁铁设置在绕线盘底座上,铁块设置在第一齿轮的背部。
12、本发明第三方面公开了本发明第二方面的一种断股修复机器人的使用方法,包括以下步骤:
13、驱动越障行走机构在输电线行走至待修复位置;
14、待护线条穿过夹紧分体的第一护线条通孔后,驱动两个固定分座合并靠拢,使位于输电线两侧的夹紧分体拼接成夹紧盘;
15、待输电线和护线条安装在绕线机构后,驱动绕线机构相对装载平台向前移动,在绕线机构向前移动的过程中,驱动绕线机构将护线条缠绕在输电线上,以对输电线进行第一绕线作业;
16、绕线机构向前移动至终端时,控制绕线机构停止绕线,驱动两个固定分座远离分开,使紧定件折弯形变而松开夹紧分体,以使夹紧分体脱离出安装缺口;
17、驱动越障行走机构向前移动并跨越夹紧盘,越障行走机构向前移动时,同步驱动绕线机构将护线条缠绕在输电线上,以对输电线进行第二绕线作业。
18、本发明提供的技术方案可以包括以下有益效果:
19、在本发明的具体应用中,两个固定分座合并后,两个夹紧分体因两个固定分座的闭合而紧固在一起,从而组成夹紧盘。若干个护线条一一对应地穿过夹紧盘的第一护线通孔,输电线穿过夹紧盘的夹紧通孔。当护线条缠绕在输电线时,若干护线条因缠绕的作用力而紧贴于第一护线通孔的内壁,从而使护线条固定在夹紧盘上。同时若干护线条还对两个夹紧分体施加作用力,使两个夹紧分体相互闭合,使夹紧盘紧固在输电线上,从而实现护线条相对固定在输电线上。如此,在两个固定分座的闭合作用下和护线条的缠绕作用下,实现夹紧盘牢固地固定在输电线上,从而确保护线条牢固地与输电线固定。
20、完成当前阶段的绕线作业后,两个夹紧分体由于若干护线条的缠绕而拼接成一体的夹紧盘。因此,在两个固定分座分离时,两个夹紧分体会与对应的紧定部相脱离,从而使夹紧分体从安装缺口脱离出。实现两个夹紧分体仍组成夹紧盘,并留存在输电线上,进而继续将护线条牢固地固定在输电线上。如此,尽管固定分座分开后,仍能对护线条和输电线进行固定,有效确保护线条牢固地固定在输电线上。
- 还没有人留言评论。精彩留言会获得点赞!