用于异步电动机负荷的通用电磁暂态仿真解耦方法和系统与流程
本发明涉及电磁暂态仿真领域,具体是涉及一种用于异步电动机负荷的通用电磁暂态仿真解耦方法和系统。
背景技术:
1、负荷模型对研究大规模电力系统的暂态稳定性和电压稳定性起着相当重要的作用。从系统角度看,电动机负荷占电力系统总负荷比例超过50%,因此在电磁暂态仿真中通常用电动机负荷模型来表示动态负荷模型。当系统中包含大量电动机负荷时,其动态特性会显著影响仿真结果。为提高仿真效率,在电力系统仿真中,异步电动机通常使用集总参数模型(忽略了电机的几何复杂性、涡流、饱和以及磁滞效应),包括相域模型(phase domain,pd),vbr(voltage-behind-reactance)模型和d-q模型。
2、(1)在pd模型中,电机变量均在abc坐标系下表示,定子和转子电路与外部网络直接相连,电机变量会和外部网络同时求解,具有较好的数值稳定性,但由于pd模型的电感矩阵参数会随着转子位置的变化而改变,因此pd模型的计算复杂度较高。
3、(2)在vbr模型中,定子变量用abc坐标表示,而转子变量用d-q坐标表示,电机等效为一个与rl支路串联的电压源。vbr模型的定子可以直接与外部网络相连,电机的状态变量和网络方程可以同时求解,改善了数值稳定性,然而这是以时变的rl参数为代价的。
4、(3)将park变换应用于pd模型,得到d-q模型,其优点是在d-q坐标系下可以得到恒定的电感矩阵,仿真效率较高。异步电动机模型中应用最广泛的d-q模型,d-q模型在pscad/emtdc,emtp-rv,matlab/simulink等商业电磁暂态仿真软件中广泛采用。
5、与本发明相关的现有技术一
6、诺顿电流源法,该方法是商业软件pscad/emtdc的采用电机-电网接口方法。
7、诺顿电流源法将异步电动机的模型等效为诺顿电流源与电网相连。这种类型的电动机-电网接口如图2所示。注入电流im(t)是利用上一个时间步长的异步电动机定子端电压来计算的,这意味着在计算异步电动机变量时有一个时间步长的延迟。因此可能导致数值不稳定的问题,特别是当异步电动机处在接近开路的状态。为了提高数值稳定性,防止异步电动机完全开路,在电动机-网络接口中引入了一个端口特征阻抗r″。然后,这个增加的电阻的影响通过注入到异步电动机定子端口的额外电流ic(t)源来补偿。
8、技术一缺点:由于注入电流im(t)是根据上一个时步的定子端电压计算得到,因此注入电流im(t)的计算存在一个步长的延时。数学上,这种延时的引入相当于数值积分中的显式方法,这一因素可能会影响仿真的数值稳定性。为了保证接口的数值稳定性和精度,该方法需要对注入电流im(t)的求解进行多次迭代计算,即需要多次求解电动机-电网整体方程。当系统规模很大时,电动机-电网整体方程阶数很高,多次求解电动机-电网整体方程的效率将十分低下。
9、与本发明相关的现有技术二
10、网络迭代法,该方法是商业软件emtp-rv的采用电机-电网接口方法。
11、在emtp-rv中,异步电动机模型与网络方程采用牛顿迭代法联立求解。此外,在emtp-rv异步电动机模型中,利用速度和电压循环迭代获得每个时间步长的电动机方程的收敛解。这两个循环的收敛判据是由用户指定的误差偏差来控制。
12、技术二的缺点:异步电动机和网络方程在每个时间步长的联立迭代求解通常需要更多的计算资源,当网络方程规模增加时,整体的仿真效率将显著降低。
技术实现思路
1、为解决含大量异步电动机负荷的电力系统的电磁暂态仿真的全网方程求解迭代次数过多,导致仿真效率低,接口数值稳定性差的问题,本发明提供一种用于异步电动机负荷的通用电磁暂态仿真解耦方法和系统,所述方法,包括:
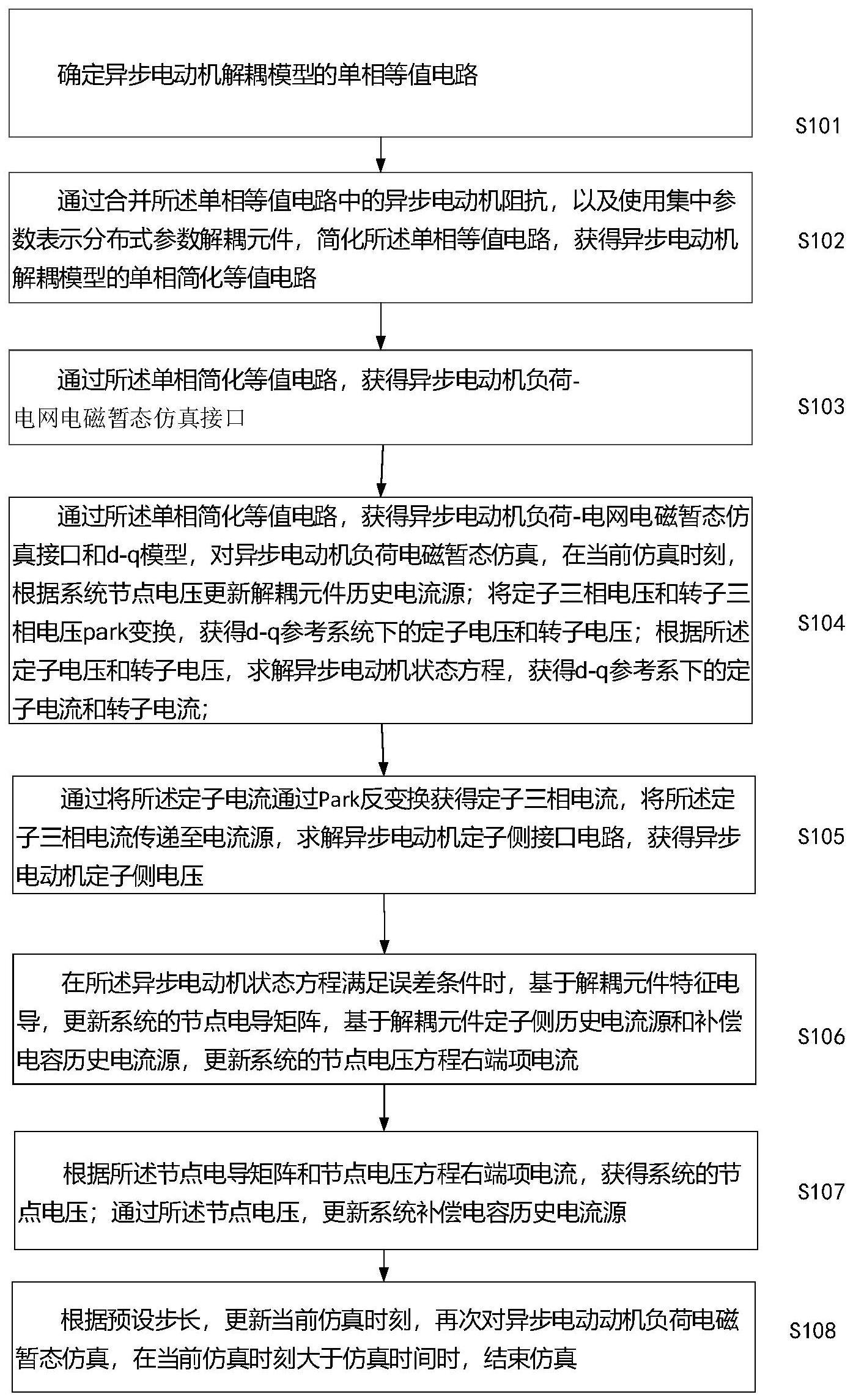
2、确定异步电动机解耦模型的单相等值电路;
3、通过合并所述单相等值电路中的异步电动机阻抗,以及使用集中参数表示分布式参数解耦元件,简化所述单相等值电路,获得异步电动机解耦模型的单相简化等值电路;
4、通过所述单相简化等值电路,获得异步电动机负荷-电网电磁暂态仿真接口;
5、基于所述异步电动机负荷-电网电磁暂态仿真接口和d-q模型,对异步电动动机负荷电磁暂态仿真,在当前仿真时刻,根据系统节点电压更新解耦元件历史电流源;将定子三相电压和转子三相电压经park变换,获得d-q参考系下的定子电压和转子电压;根据所述定子电压和转子电压,求解异步电动机状态方程,获得d-q参考系下的定子电流和转子电流;
6、通过将所述定子电流通过park反变换获得定子三相电流,将所述定子三相电流传递至电流源,求解异步电动机定子侧接口电路,获得异步电动机定子侧电压;
7、在所述异步电动机状态方程满足误差条件时,基于解耦元件特征电导,更新系统的节点电导矩阵,基于解耦元件定子侧历史电流源和补偿电容历史电流源,更新系统的节点电压方程右端项电流;
8、根据所述节点电导矩阵和节点电压方程右端项电流,获得系统的节点电压;通过所述节点电压,更新系统补偿电容历史电流源;
9、根据预设步长,更新当前仿真时刻,再次对异步电动动机负荷电磁暂态仿真,在当前仿真时刻大于仿真时间时,结束仿真。
10、进一步的,确定异步电动机解耦模型的单相等值电路,包括:
11、确定用于构建异步电动机解耦模型的输入数据和相关基准值;
12、通过所述输入数据和相关基准值,以及异步电动机原始模型的单相电路拓扑,确定异步电动机解耦模型的单相等值电路。
13、进一步的,通过合并异步电动机阻抗,以及使用集中参数表示分布式参数解耦元件,简化所述单相等值电路,获得异步电动机解耦模型的单相简化等值电路,包括:
14、通过以下公式合并异步电动机阻抗:
15、
16、其中,zim为异步电动机等值阻抗,zs为定子等值阻抗,zr为转子等值阻抗,zm为励磁阻抗;
17、将分布式参数解耦元件用π型集中参数表示,其中解耦元件等值阻抗xd和解耦元件等值电纳bd的计算公式为:
18、
19、其中,zc为解耦元件特征阻抗,γ为传输线的传播常数,j为虚数单位,ω为同步角速度,ld为解耦元件电感,cd为解耦元件电容;
20、通过上述方式获得异步电动机解耦模型的单相简化等值电路。
21、进一步的,所述异步电动机负荷-电网电磁暂态仿真接口,具体包括:1个异步电动机方程求解模块和3个电路模块;
22、所述3个电路模块,分别为异步电动机定子侧接口电路,异步电动机电网侧接口电路和外部电网;异步电动机电网侧接口电路与外部电网直接相连,相连节点为k;异步电动机定子侧接口电路包含1个节点,该节点为m;
23、将异步电动机电网侧接口电路的解耦元件特征电导gc和解耦元件电网侧历史电流源ik,与异步电动机定子侧接口电路的gc和解耦元件定子侧历史电流源im合称为解耦元件。
24、进一步的,基于所述异步电动机负荷-电网电磁暂态仿真接口和d-q模型,对异步电动动机负荷电磁暂态仿真,在当前仿真时刻,根据系统节点电压更新解耦元件历史电流源,包括:
25、开始对异步电动动机负荷电磁暂态仿真,令仿真时刻t=0;
26、将仿真时刻向前推进一个步长,更新仿真时刻:t=t+δt,将迭代次数置零,令j=0;
27、根据t-δt时刻求解得到的系统节点电压u,更新解耦元件历史电流源,具体为:
28、im(t-δt)=im(t-2δt)+α(-2gcuk(t-δt)+ik(t-2δt)-im(t-2δt))
29、ik(t-δt)=ik(t-2δt)+α(-2gcum(t-δt)+im(t-2δt)-ik(t-2δt))
30、其中,uk是节点k电压,um是节点m电压,α∈[0,1]是插值系数。
31、进一步的,将定子三相电压和转子三相电压经park变换,获得d-q参考系下的定子电压和转子电压,包括:
32、令迭代次数j=j+1,将上一次迭代获得的定子三相电压vabcs(t)和转子三相电压vabcr(t),经park变换,输出d-q参考系下的定子电压vdqs(t)和转子电压vdqr(t),计算公式如下;
33、vqds=kvabcs
34、vqdr=kvabcr
35、其中,park变换矩阵k为
36、
37、上式中,θdq是旋转角度。
38、进一步的,根据所述定子电压和转子电压,求解异步电动机状态方程,获得d-q参考系下的定子电流和转子电流,包括:
39、d-q参考系下的定子和转子的状态方程为
40、
41、
42、其中,
43、
44、其中,下标abc表示该变量是abc参考系下的变量,下标dq表示该变量是dq0参考系下的变量,v和i是列向量,下标s表示定子,下标r表示转子,λ是磁链,ω同步角速度,ωr是转子角速度;
45、d-q参考系下定子和转子的磁链λ和电流i的关系如下:
46、
47、计算异步电动机状态方程求解模块,得到t时刻的定子电流idqs和转子电流idqr,其中,矩阵元素ldqs~ldqr是异步电动机电感矩阵元素,由异步电动机状态方程求解模块计算。
48、进一步的,通过将所述定子电流通过park反变换获得定子三相电流,将所述定子三相电压传递至电流源,求解异步电动机定子侧接口电路,获得异步电动机定子侧电压,包括:
49、将述定子电流idqs通过park反变换获得定子三相电流iabcs,将所述定子三相电流iabcs传递至电流源is,求解异步电动机定子侧接口电路,输出t时刻的异步电动机定子侧电压vabcs,
50、park反变换计算式如下
51、iabcs=k-1iqds
52、求解单相异步电动机定子侧接口电路的计算式如下
53、(gc+gs)vm(t)=is(t)-im(t)
54、上式abc三相分别求解,输出t时刻的定子侧三相电压vabcs=[vma vmb vmc]t。
55、进一步的,在所述异步电动机状态方程满足误差条件时,基于解耦元件特征电导,更新系统的节点电导矩阵,基于解耦元件定子侧历史电流源和补偿电容历史电流源,更新系统的节点电压方程右端项电流,包括:
56、根据定子电流idqs、转子电流idqr和定子侧三相电压vabcs,判断异步电动机状态方程求解是否满足误差条件,若满足误差条件
57、
58、则异步电动机状态方程求解模块和异步电动机定子侧接口电路求解完成,更新t时刻系统的节点电导矩阵g。
59、进一步的,根据所述节点电导矩阵和节点电压方程右端项电流,获得系统的节点电压;通过所述节点电压,更新系统补偿电容历史电流源,包括:
60、根据所述节点电导矩阵g,得到节点电压方程右端项i,求解t时刻系统节点电压方程:
61、gu=i
62、输出t时刻系统的节点电压u;
63、通过所述节点电压,更新系统补偿电容历史电流源,具体公式为,
64、
65、进一步的,根据预设步长,更新当前仿真时刻,再次对异步电动动机负荷电磁暂态仿真,在当前仿真时刻大于仿真时间时,结束仿真,包括:
66、如果当前仿真时刻t大于仿真时间t,则结束仿真。
67、本发明同时提供一种用于异步电动机负荷的通用电磁暂态仿真解耦系统,包括:
68、等值电路模块,用于确定异步电动机解耦模型的单相等值电路;
69、简化模块,用于通过合并所述单相等值电路中的异步电动机阻抗,以及使用集中参数表示分布式参数解耦元件,简化所述单相等值电路,获得异步电动机解耦模型的单相简化等值电路;
70、仿真接口获得模块,用于通过所述单相简化等值电路,获得异步电动机负荷-电网电磁暂态仿真接口;
71、第一仿真模块,用于基于所述异步电动机负荷-电网电磁暂态仿真接口和d-q模型,对异步电动动机负荷电磁暂态仿真,在当前仿真时刻,根据系统节点电压更新解耦元件历史电流源;将定子三相电压和转子三相电压经park变换,获得d-q参考系下的定子电压和转子电压;根据所述定子电压和转子电压,求解异步电动机状态方程,获得d-q参考系下的定子电流和转子电流;
72、第二仿真模块,用于通过将所述定子电流通过park反变换获得定子三相电流,将所述定子三相电流传递至电流源,求解异步电动机定子侧接口电路,获得异步电动机定子侧电压;
73、第三仿真模块,用于在所述异步电动机状态方程满足误差条件时,基于解耦元件特征电导,更新系统的节点电导矩阵,基于解耦元件定子侧历史电流源和补偿电容历史电流源,更新系统的节点电压方程右端项电流;
74、第四仿真模块,用于根据所述节点电导矩阵和节点电压方程右端项电流,获得系统的节点电压;通过所述节点电压,更新系统补偿电容历史电流源;
75、迭代模块,用于根据预设步长,更新当前仿真时刻,再次对异步电动动机负荷电磁暂态仿真,在当前仿真时刻大于仿真时间时,结束仿真。
- 还没有人留言评论。精彩留言会获得点赞!