不对称电流双周期的电励磁双凸极电机失磁容错控制方法
本技术涉及电励磁双凸极电机领域,尤其是一种不对称电流双周期的电励磁双凸极电机失磁容错控制方法。
背景技术:
1、电励磁双凸极电机的定子上有励磁绕组和电枢绕组、转子上无绕组,结构简单可靠,在航空航天等重要场合具有较好的应用前景。而电励磁双凸极电机运行在环境恶劣的航空航天领域,不可避免的发生励磁故障,使得其无法正常运行。为了满足航空航天的可靠性要求,有必要研究电励磁双凸极电机励磁故障时的起动运行容错策略。
2、目前,关于失磁电动控制策略主要包含如下:王开淼等公开的“电励磁双凸极电机失磁故障容错发电系统及其控制方法”(中国,公开日:2019年3月8日,公开号:cn109450340a)通过使用h桥变换器及单周期角度位置控制策略实现失磁电动,但存在开关管数量较多且转矩脉动较大,且失磁运行时铜耗较大,转矩电流比低的问题。杨岚的《失磁状态下容错运行的dsem系统设计》(2018年硕士学位论文)所提方法均为单周期转速电流闭环失磁电动容错控制,也存在转矩脉动较大,失磁运行时铜耗较大,转矩电流比低。史宏俊等公开的“一种电励磁双凸极电机失磁故障下的容错电动运行方法”(中国,公开日:2022年09月30日,公开号:cn115133844a)介绍了一种采用标准双周期电流给定函数的失磁容错电动控制策略,该方法可以有效的降低失磁下的转矩脉动,但是该控制策略存在失磁运行时铜耗也较大,转矩电流比低,且转矩脉动需要进一步优化。但是上述所提的失磁容错电动控制策略大都存在转矩脉动较大、铜耗较大、转矩电流比较低等问题。
技术实现思路
1、本技术人针对上述问题及技术需求,提出了一种不对称电流双周期的电励磁双凸极电机失磁容错控制方法,本技术的技术方案如下:
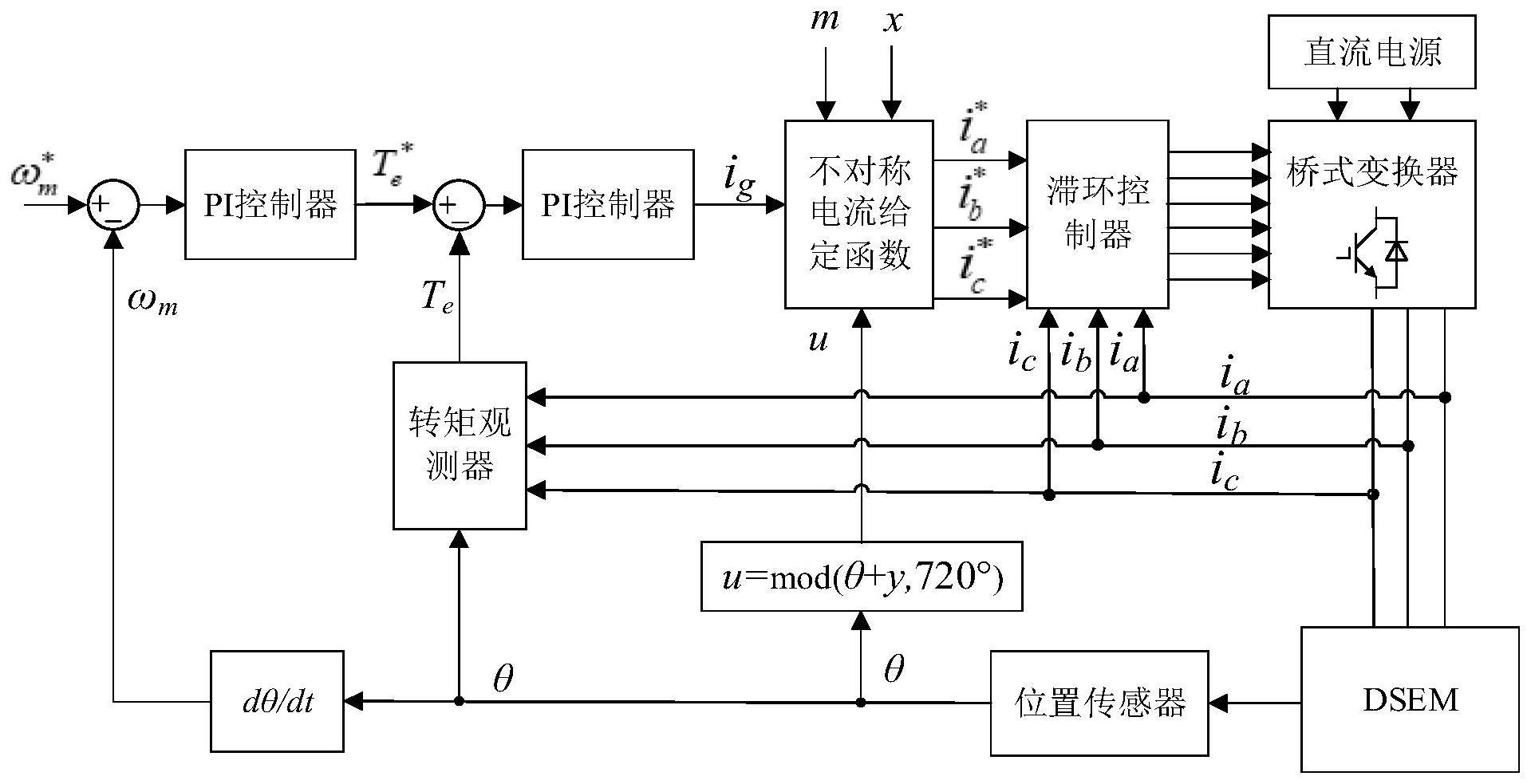
2、一种不对称电流双周期的电励磁双凸极电机失磁容错控制方法,其特征在于,电励磁双凸极电机失磁容错控制方法,包括当电励磁双凸极电机出现励磁故障时:
3、利用转速转矩双闭环控制基于电励磁双凸极电机的电机电角度θ确定电流给定值幅值ig;
4、基于电角度划分参数x将包含两个电感周期的控制周期划分为多个连续且不重合的电角度区间,0°<x<120°;
5、根据电机电角度θ和提前角y确定转子位置角u;
6、按照转子位置角u所在的电角度区间对应的不对称电流给定函数,结合电流给定值幅值ig以及电励磁双凸极电机的三相绕组在电角度区间内的自感特性,得到三相电流给定值;
7、将三相电流给定值和三相电流实际值进行比较得到比较信号,对比较信号通过滞环输出pwm信号驱动出现励磁故障的电励磁双凸极电机连接的桥式变换器。
8、其进一步的技术方案为,对于任意一个电角度区间:
9、电角度区间内自感不变的相绕组的相电流给定值的幅值为|m·ig|,电角度区间内自感上升的相绕组的相电流给定值的幅值为|ig|,电角度区间内自感下降的相绕组的相电流给定值的幅值为|(1-m)·ig|,电流偏置系数m小于1且与电励磁双凸极电机的转速对应。
10、其进一步的技术方案为,电流偏置系数m∈[0.8,0.95]。
11、其进一步的技术方案为,得到三相电流给定值,包括:
12、(1)当u∈[0,x)时得到的三相电流给定值为:
13、ia*=(m-1)·ig/x·(u-0)-m·ig;
14、ib*=ig/x·(u-0)+(-ig+m·ig);
15、ic*=-m·ig/x·(u-0)+ig;
16、(2)当u∈[x,120°)时得到的三相电流给定值为:
17、ia*=-ig;
18、ib*=m*ig;
19、ic*=(1-m)*ig;
20、(3)当u∈[120°,120°+x)时得到的三相电流给定值为:
21、ia*=-ig+(m·ig/x)·(u-120);
22、ib*=(1-m)·ig/x·(u-120)+m·ig;
23、ic*=-(ig/x)·(u-120)+(1-m)·ig;
24、(4)当u∈[120°+x,240°)时得到的三相电流给定值为:
25、ia*=-(1-m)·ig;
26、ib*=ig;
27、ic*=-m·ig;
28、(5)当u∈[240°,240°+x)时得到的三相电流给定值为:
29、ia*=(ig/x)·(u-240)+(m·ig-ig);
30、ib*=ig-m·(ig/x)·(u-240);
31、ic*=-m·ig+(m-1)·ig/x·(u-240);
32、(6)当u∈[240°+x,360°)时得到的三相电流给定值为:
33、ia*=m·ig;
34、ib*=(1-m)·ig;
35、ic*=-ig;
36、(7)当u∈[360°,360°+x)时得到的三相电流给定值为:
37、ia*=-((m-1)·ig/x·(u-360)-m·ig);
38、ib*=-(ig/x·(u-360)+(-ig+m·ig));
39、ic*=-(-m·ig/x·(u-360)+ig);
40、(8)当u∈[360°+x,480°)时得到的三相电流给定值为:
41、ia*=ig;
42、ib*=-m*ig;
43、ic*=-(1-m)*ig;
44、(9)当u∈[480°,480°+x)时得到的三相电流给定值为:ia*=-(-ig+(m·ig/x)·(u-480));
45、ib*=-((1-m)·ig/x·(u-480)+m·ig);
46、ic*=-(-(ig/x)·(u-480)+(1-m)·ig);
47、(10)当u∈[480°+x,600°)时得到的三相电流给定值为:
48、ia*=(1-m)·ig;
49、ib*=-ig;
50、ic*=m·ig;
51、(11)当u∈[600°,600°+x)时得到的三相电流给定值为:
52、ia*=-((ig/x)·(u-600)+(m·ig-ig));
53、ib*=-(ig-m·(ig/x)·(u-600));
54、ic*=-(-m·ig+(m-1)·ig/x·(u-600));
55、(12)当u∈[600°+x,720°]时得到的三相电流给定值为:
56、ia*=-m·ig;
57、ib*=-(1-m)·ig;
58、ic*=ig;
59、其中,ia*是a相绕组的相电流给定值,ib*是b相绕组的相电流给定值,ic*是c相绕组的相电流给定值;在每个覆盖0°~360°的电感周期内,a相绕组在0°~120°内自感上升、在120°~240°内自感下降、在240°~360°内自感不变,b相绕组在0°~120°内自感不变、在120°~240°内自感上升、在240°~360°内自感下降,c相绕组在0°~120°内自感下降、在120°~240°内自感不变、在240°~360°内自感上升。
60、其进一步的技术方案为,根据电机电角度θ和提前角y确定转子位置角u,包括确定u=mod(θ+y,720°),其中,mod(θ+y,720°)表示求(θ+y)与720°的余数。
61、其进一步的技术方案为,提前角y∈[0°,30°]且取值与电励磁双凸极电机的转速对应。
62、其进一步的技术方案为,确定电流给定值幅值ig,包括:
63、计算dθ/dt得到电励磁双凸极电机的角频率实际值ωm;
64、将角频率给定值ωm*与角频率实际值ωm的差值输入pi控制器得到转矩给定值te*;
65、利用转矩观测器基于电机电角度θ和三相电流实际值确定转矩实际值te;
66、将转矩给定值te*与转矩实际值te的差值输入pi控制器得到电流给定值幅值ig。
67、本技术的有益技术效果是:
68、本技术公开一种不对称电流双周期的电励磁双凸极电机失磁容错控制方法,该方法根据各个电角度区间内三相绕组的自感特性来给各个相绕组分配电流给定值,提供不对称的三相电流给定值,然后采用滞环控制三相电流实际值跟随三相电流给定值,可以实现对出现励磁故障的电励磁双凸极电机的容错控制,设计的不对称电流双周期控制策略有利于减小不出力相的电流,从而减小失磁下的铜耗,提高转矩电流比,抑制转矩脉动,提前角y的加入可以进一步抑制转矩脉动。
69、该方法采用转速转矩电流三闭环的控制结构,转矩闭环的加入可以有效的降低失磁运行时换相及非换相阶段的转矩脉动,也进一步降低失磁运行时的三相绕组电流,提高失磁运行时转矩电流比。
- 还没有人留言评论。精彩留言会获得点赞!