配网绝缘护套带电安装设备以及安装方法与流程
本发明涉及电力施工,特别涉及配网绝缘护套带电安装设备以及安装方法。
背景技术:
1、随着社会经济的快速发展,人民生产生活中对电力持续稳定供应的要求越来越高,配电网处于电力系统末端,是保证电力持续供给的关键环节,其可靠性在整个供电系统中占有非常重要的位置,目前,传统的配电网带电检修主要由人工进行,大多是工人穿戴绝缘服站立高空绝缘斗中进行带电断接引流线作业,部分地区也开展过采用绝缘操作杆进行配电网带电断接引流线作业,但是配电网线路通常十分紧湊,线路相间距离小,作业人员带电作业时易造成短路从而引发人身伤亡等事故,同时,这种作业方式大多劳动强度大、工作效率低且作业危险系数高,部分地区配电网线路分布及地理条件恶劣,难以开展相关的带电作业,从而不得不对线路进行停电进行检修和维护,严重影响了配电网的持续稳定运行因此,为了保证配电网带电作业人员的安全,提高配电网带电作业效率,使配电网持续稳定运行,由机器人代替工作人员进行配电网带电断接引流线作业显得越来越重要。
技术实现思路
1、本发明的目的在于至少解决现有技术中存在的技术问题之一,提供配网绝缘护套带电安装设备以及安装方法,能够解决作业人员带电作业时易造成短路从而引发人身伤亡等事故的问题。
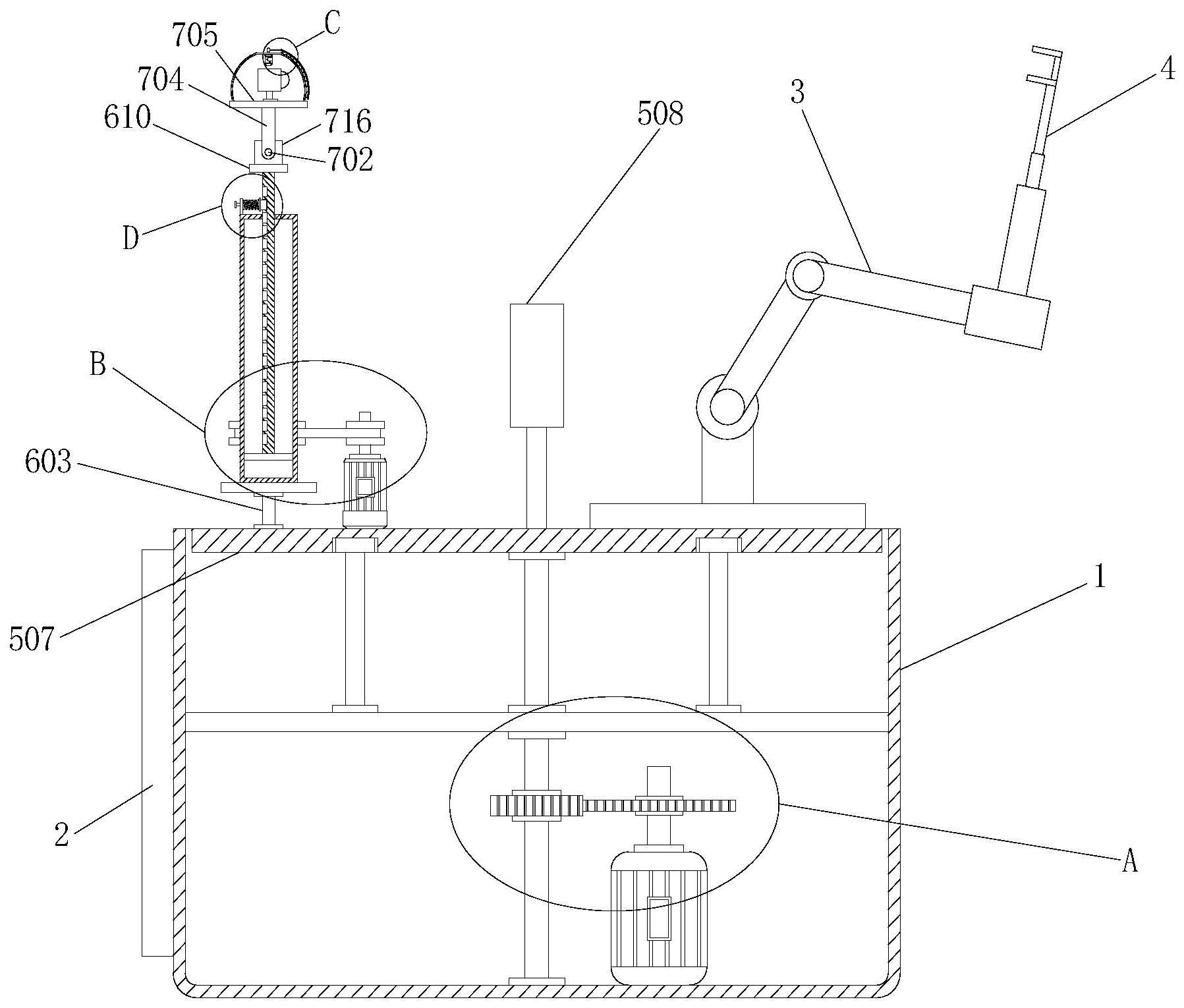
2、为实现上述目的,本发明提供如下技术方案:配网绝缘护套带电安装设备,包括抬升箱、辅助单元、调节单元和清理单元,抬升箱的一侧固定安装有安装板,抬升箱上设有机器人本体,机器人本体上设置有绝缘护套夹具结构;
3、辅助单元设于所述抬升箱上,所述辅助单元包括电机一和旋转台,电机一用于驱使旋转台进行旋转,旋转台旋转时用于将机器人本体和绝缘护套夹具结构的位置进行调节;
4、调节单元设于所述抬升箱上,所述调节单元包括电机二和固定盒,电机二用于驱使固定盒进行转动;
5、清理单元设于所述调节单元上,所述清理单元包括电机四、防护罩和清理板,电机四用于驱使清理板旋转,清理板旋转用于将防护罩的外壁进行清理。
6、优选的,所述辅助单元还包括转杆一、齿轮一、转动柱、齿轮二、固定板和照明灯,抬升箱的内侧底部固定安装有电机一,电机一的转轴固定安装有转杆一,转杆一的外壁固定安装有齿轮一,抬升箱的内侧底部转动安装有转动柱,转动柱的外壁固定安装有齿轮二,齿轮一与齿轮二相啮合,抬升箱的两侧内壁固定安装有固定板,转动柱的一端延伸至固定板的上方且固定安装有旋转台,固定板与转动柱为转动安装,旋转台的顶部固定安装有照明灯,机器人本体的底部与旋转台的顶部固定安装。
7、优选的,所述调节单元还包括转杆二、转动轴、皮带轮、皮带、连接板、活动板、升降板和固定横板,旋转台的顶部转动安装有转动轴,转动轴的顶部固定安装有连接板,连接板的顶部固定安装有固定盒,旋转台的顶部固定安装有电机二,电机二的转轴固定安装有转杆二,转杆二的外壁与固定盒的外壁均固定安装有皮带轮,皮带轮的数量为两组,两组皮带轮通过皮带传动连接,活动板位于固定盒的内部且活动板的顶部固定安装有升降板,升降板的一端延伸至固定盒的上方并固定安装有固定横板。
8、优选的,所述清理单元还包括转杆三、电机三、连动杆、支撑板、转杆四、固定套、支撑竖板、限位弹簧、连接竖板、限位块、滑动横杆、激光扫描摄像头和安装竖板,固定横板的顶部固定安装有两组安装竖板,安装竖板的相对面转动安装有转杆三,其中一组安装竖板的前侧固定安装有电机三,电机三的转轴与转杆三的一端固定安装,转杆三的外壁固定安装有连动杆,连动杆的顶部固定安装有支撑板,支撑板的顶部固定安装有防护罩和激光扫描摄像头,激光扫描摄像头位于防护罩的内部,防护罩的顶部转动安装有转杆四,转杆四的外壁固定安装有固定套,固定套的外壁固定安装有清理板,防护罩的内侧顶部固定安装有电机四,电机四的转轴与转杆四的一端固定安装,固定盒的顶部固定安装有支撑竖板,支撑竖板的一侧固定安装有限位弹簧,限位弹簧的一侧固定安装有连接竖板,连接竖板的一侧固定安装有限位块,连接竖板的另一侧固定安装有滑动横杆,滑动横杆的一端延伸至支撑竖板的另一侧且固定安装有把手,滑动横杆与支撑竖板为滑动安装。
9、优选的,所述固定盒的内部开设有可供升降板活动的开口,升降板的内部开设有可供有限位块活动的凹槽,限位块的一端延伸至凹槽内。
10、优选的,所述清理板的底部固定安装有清理刷,清理刷与防护罩的外壁相接触。
11、优选的,所述旋转台的外壁与抬升箱的内部不接触。
12、优选的,所述固定板的顶部固定安装有稳定杆,稳定杆的顶部固定安装有环形滑块,旋转台的底部开设有环形滑槽,环形滑块滑动安装于环形滑槽内,旋转台与稳定杆为滑动安装。
13、一种根据上述所述的配网绝缘护套带电安装方法,包括以下步骤:
14、步骤一、全局建模,控制机器人本体启动,带动绝缘护套夹具结构升到安装绝缘护套目标作业区的相应位置,使用激光扫描摄像头进行全局建模,识别出主线位置、引线位置、周围障碍物的位置,机器人本体根据建模的数据,在后台进行计算模拟作业,计算出当前机器人本体停靠的位置是否需要调整,如果需要调整机器人本体引导人工完成机器人本体空中位置调整;
15、步骤二、运动规划路径判断,机器人本体根据建模的数据,识别出引线线缆的位置姿态,并计算出机械臂的空中作业和护套安装工具的空中位置姿态,机器人本体同时会把扫描到的线路、线杆、水泥杆等物体标记城障碍物,并在后台模拟出机械臂可能运动路径轨迹,确保机械臂在运动过程中不会和这些物体碰撞,并确定最优的机械臂运动路径;
16、步骤三、取绝缘护套器和安装绝缘护套功能,机器人本体控制机械臂从工具库上取出绝缘护套工器,按照步骤二的运动规划路径,将机械臂移动到待柱开桩头,机器人本体将绝缘护套卡入柱开桩头,此时机械臂上的无框电机执行绝缘护套压紧操作,将魔术贴两头闭合,机器人本体无框电机反转,将绝缘护套安装工具放回工具库;
17、步骤四、设备调节,在根据电缆的位置控制电机一启动,电机一启动带动转杆一转动,转杆一转动通过齿轮一和齿轮二带动转动柱进行旋转,转动柱旋转时带动旋转台以及旋转台上的机器人本体进行旋转,即可调整机器人本体的位置,当激光扫描摄像头的扫描角度需要调节时,拉动滑动横杆,滑动横杆移动带动连接竖板和限位块移动,进而取消对升降板的限位,然后在将升降板上的激光扫描摄像头调整至合适高度后,松开支撑竖板,通过限位弹簧回弹将限位块重新插入至升降板上的凹槽内,对升降板进行限位,然后在控制电机二启动,电机二启动通过皮带轮和皮带带动固定盒进行转动,固定盒转动带动激光扫描摄像头进行转动,再控制电机三启动,电机三启动带动转杆三转动,转杆三转动通过连动杆带动激光扫描摄像头进行移动,这样能够将激光扫描摄像头的扫描位置进行快速的调节,当防护罩上产生落叶等杂质影响激光扫描摄像头扫描的效果时,控制电机四启动,电机四启动带动转杆四和固定套转动,进而带动清理板转动,将防护罩的外壁进行清理。
18、与现有技术相比,本发明的有益效果是:
19、(1)、该配网绝缘护套带电安装设备以及安装方法,通过机器人本体、绝缘护套夹具结构、电机一、转杆一、齿轮一、转动柱、齿轮二、固定板和旋转台的配合使用,能够在对电缆进行带电作业时,通过机器人本体和绝缘护套夹具结构进行操作,这样能够与减少作业人员带电作业时易造成短路从而引发人身伤亡等事故,进而能够增加工作人员电缆工作的稳定性,并且在使用时,还能够将机器人本体和绝缘护套夹具结构的角度进行快速的调节,这样能够跟对于不同位置的电缆进行操作,提高装置的实用性。
20、(2)、该配网绝缘护套带电安装设备以及安装方法,通过电机二、转杆二、转动轴、皮带轮、皮带、连接板和固定盒的配合使用,能够将激光扫描摄像头的高度进行快速的调节,这样能够在激光扫描摄像头对周围环境扫描的过程中,根据周围树木的位置将其高度进行调节,避免树木遮挡激光扫描摄像头的扫描视线,提高装置的扫描范围,增加装置的建模效果。
21、(3)、该配网绝缘护套带电安装设备以及安装方法,通过安装竖板、转杆三、电机三、连动杆、支撑板、防护罩、转杆四和固定套的配合使用,一方面能够将激光扫描摄像头的角度进行旋转,提高激光扫描摄像头的扫描范围,同时还能够将激光扫描摄像头的上下角度进行调整,进一步的增加了扫描的准确性,另一方面通过旋转清理板能够将防护罩的外壁进行擦拭,这样能够避免在作业时,树叶等杂质粘附于防护罩上,对激光扫描摄像头造成遮挡,影响激光扫描摄像头的扫描效果。
- 还没有人留言评论。精彩留言会获得点赞!