一种低载频比下高速电机延迟补偿策略
本发明涉及一种低载频比下高速电机延迟补偿策略,属于高速电机控制。
背景技术:
1、高速电机由于其体积小、质量轻、可靠性高等方面的优点,广泛应用于现代交通、航空航天、能源及精密制造等领域。但是,其转速基频高的特性给电机控制器设计带来较大的挑战。尤其是在电机转速基频很高,而控制器载波频率不高的场合,由于在该场合下载频比较低,导致由于控制器开关周期、硬件带宽所引起的延时环节无法忽略,从而出现电机转速失控的现象,严重威胁到电机所驱动设备的稳定运行。而若采用sic、gan等宽禁带器件,虽然可以解决转速失控的问题,但也导致控制器的成本上升。
技术实现思路
1、为解决上述问题,本发明提出一种低载频比下高速电机延迟补偿策略,通过引入电流预测控制模块以及延迟补偿算法模块,从而消除由于延迟环节带来的电机转速失控问题。
2、本发明采用以下技术方案:
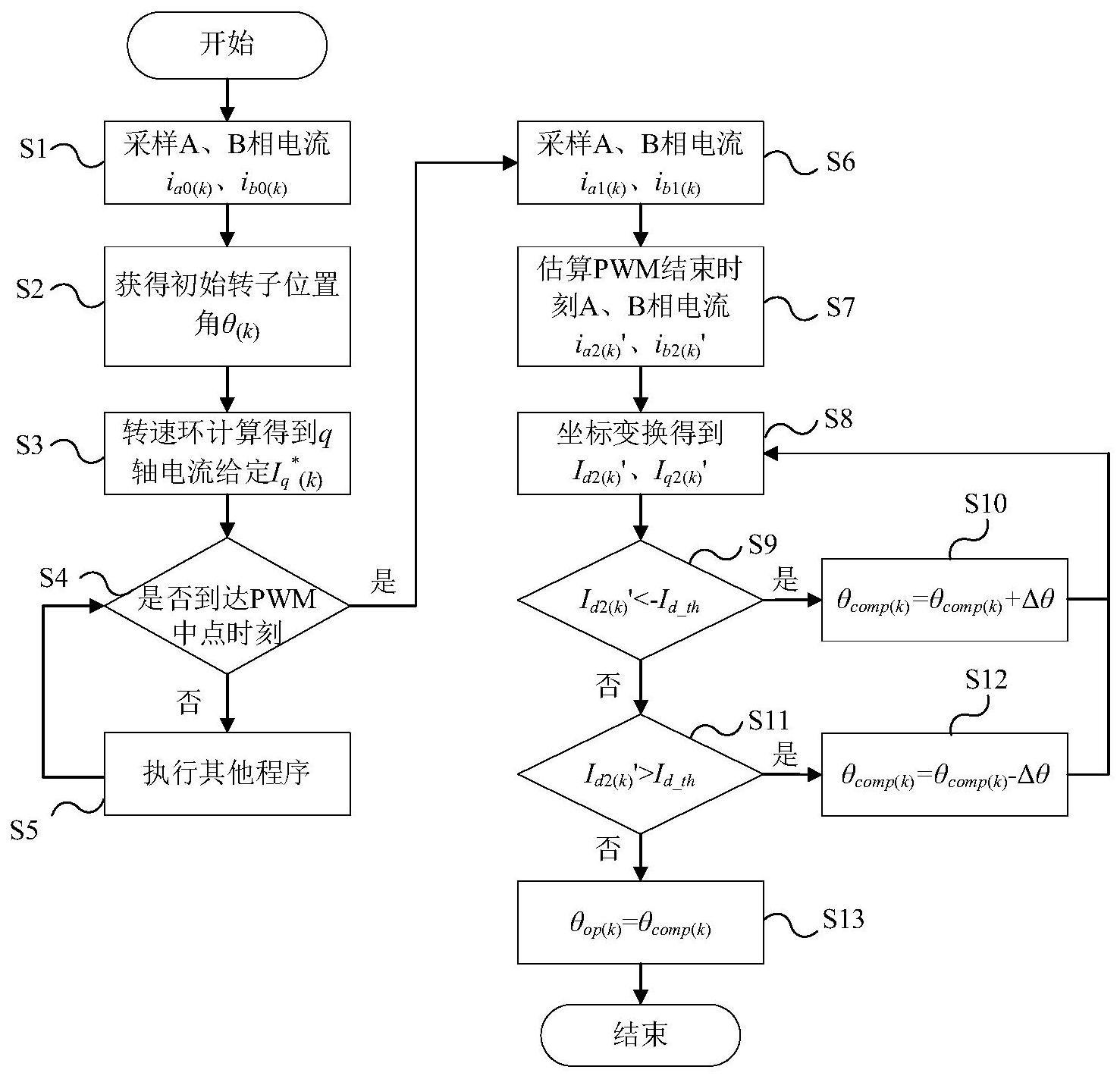
3、一种低载频比下高速电机延迟补偿策略,包括:
4、步骤s1,在第k周期pwm起始时刻采样a、b两相的电流ia0(k)、电流ib0(k);
5、步骤s2,通过无位置算法或者位置传感器获得初始转子位置角θ(k);
6、步骤s3,通过转速环计算得到q轴给定电流iq(k)*;
7、步骤s4,判断是否到达pwm中点时刻;
8、步骤s5,若步骤s4条件不成立,则执行其他程序,并返回步骤s4重新判断;
9、步骤s6,若步骤s4条件成立,则在pwm中点时刻再次采样a、b两相的电流ia1(k)、电流ib1(k);
10、步骤s7,根据对称性估算pwm周期结束时刻的电流ia2(k)'、电流ib2(k)';
11、步骤s8,通过所述初始转子位置角θ(k)、所述电流ia2(k)'、所述电流ib2(k)'估算d轴实际电流id2(k)'、q轴实际电流iq2(k)';
12、步骤s9,判断所述d轴实际电流id2(k)'是否小于负的d轴电流阈值-id_th;
13、步骤s10,若步骤s9条件成立,则将当前位置补偿角θcomp(k)增加单位步长δθ,并返回步骤s8继续执行;
14、步骤s11,若步骤s9条件不成立,则判断所述d轴实际电流id2(k)'是否大于d轴电流阈值id_th;
15、步骤s12,若步骤s11条件成立,则将当前位置补偿角θcomp(k)减小单位步长δθ,并返回步骤s8继续执行;
16、步骤s13,若步骤s11条件不成立,即当|id2(k)'|<id_th时,此时的补偿角θcomp(k)即为最优位置补偿角θop(k)。
17、在一具体实施例中,上述一种低载频比下高速电机延迟补偿策略还包括,所述最优位置补偿角θop(k)与所述初始转子位置角θ(k)相加后获得补偿过后的转子位置角θr(k)。
18、在一具体实施例中,上述一种低载频比下高速电机延迟补偿策略还包括,所述转子位置角θr(k)经过转速计算得到电机的实际转速ω。
19、在一具体实施例中,上述一种低载频比下高速电机延迟补偿策略还包括,所述电流ia2(k)'、电流ib2(k)'分别经过clark变换以及park变换得到所述d轴实际电流id2(k)'、所述q轴实际电流iq2(k)'。
20、在一具体实施例中,上述一种低载频比下高速电机延迟补偿策略还包括,将电机给定转速ω*与所述实际转速ω的误差输入转速控制环得到q轴给定电流iq*(k),所述q轴给定电流iq*(k)与所述q轴实际电流iq2(k)'作差,经过电流控制环输出q轴给定电压uq(k)。
21、在一具体实施例中,上述一种低载频比下高速电机延迟补偿策略还包括,d轴给定电流id*(k)为0,将所述d轴给定电流id*(k)与所述d轴实际电流id2(k)'作差,经过电流控制环输出d轴给定电压ud(k)。
22、在一具体实施例中,上述一种低载频比下高速电机延迟补偿策略还包括,所述q轴给定电压uq(k)、所述d轴给定电压ud(k)经过反park变换与反clark变换转换成三相电压ua、ub与uc,送入三相全桥变换器。
23、进一步地,所述最优位置补偿角θop(k)通过pwm周期结束时刻的d轴实际电流id2(k)'的大小迭代获得。
24、进一步地,所述单位步长δθ小于单个pwm周期电机转过的角度θpwm。
25、进一步地,所述d轴电流阈值id_th大于电流采样波动的最大值。
26、本发明采用以上技术方案与现有技术相比,具有以下技术效果:
27、(1)本发明所采用的补偿算法不依赖于电机数学模型,通过不断迭代的方式获得最优位置补偿角θop(k)。
28、(2)本发明通过预测第k周期pwm结束时刻的电流值ia2(k)'、ib2(k)'以及id2(k)'、iq2(k)',并将id2(k)'、iq2(k)'作为电流环的输入,可以完全消除控制器的延迟。
技术特征:
1.一种低载频比下高速电机延迟补偿策略,其特征在于:包括:
2.根据权利要求1所述的一种低载频比下高速电机延迟补偿策略,其特征在于,还包括,所述最优位置补偿角θop(k)与所述初始转子位置角θ(k)相加后获得补偿过后的转子位置角θr(k)。
3.根据权利要求2所述的一种低载频比下高速电机延迟补偿策略,其特征在于,还包括,所述转子位置角θr(k)经过转速计算得到电机的实际转速ω。
4.根据权利要求3所述的一种低载频比下高速电机延迟补偿策略,其特征在于,还包括,所述电流ia2(k)'、电流ib2(k)'分别经过clark变换以及park变换得到所述d轴实际电流id2(k)'、所述q轴实际电流iq2(k)'。
5.根据权利要求4所述的一种低载频比下高速电机延迟补偿策略,其特征在于,还包括,将电机给定转速ω*与所述实际转速ω的误差输入转速控制环得到q轴给定电流iq*(k),所述q轴给定电流iq*(k)与所述q轴实际电流iq2(k)'作差,经过电流控制环输出q轴给定电压uq(k)。
6.根据权利要求5所述的一种低载频比下高速电机延迟补偿策略,其特征在于,还包括,d轴给定电流id*(k)为0,将所述d轴给定电流id*(k)与所述d轴实际电流id2(k)'作差,经过电流控制环输出d轴给定电压ud(k)。
7.根据权利要求6所述的一种低载频比下高速电机延迟补偿策略,其特征在于,还包括,所述q轴给定电压uq(k)、所述d轴给定电压ud(k)经过反park变换与反clark变换转换成三相电压ua、ub与uc,送入三相全桥变换器。
8.根据权利要求1所述的一种低载频比下高速电机延迟补偿策略,其特征在于,所述最优位置补偿角θop(k)通过pwm周期结束时刻的d轴实际电流id2(k)'的大小迭代获得。
9.根据权利要求1所述的一种低载频比下高速电机延迟补偿策略,其特征在于,所述单位步长δθ小于单个pwm周期电机转过的角度θpwm。
10.根据权利要求1所述的一种低载频比下高速电机延迟补偿策略,其特征在于,所述d轴电流阈值idth大于电流采样波动的最大值。
技术总结
本发明公开了一种低载频比下高速电机延迟补偿策略,首先,在第k周期PWM周期起始时刻采样A、B两相电流i<subgt;a0(k)</subgt;、i<subgt;b0(k)</subgt;,同时,通过无位置算法或者位置传感器获得初始转子位置角θ<subgt;(k)</subgt;,并通过转速环计算得到q轴给定电流I<subgt;q(k)</subgt;<supgt;*</supgt;;当到达PWM中点时刻时,再次采样A、B两相电流i<subgt;a1(k)</subgt;、i<subgt;b1(k)</subgt;,并根据对称性估算PWM周期结束时刻的电流i<subgt;a2(k)</subgt;'、i<subgt;b2(k)</subgt;',然后通过初始转子位置角θ<subgt;(k)</subgt;计算d/q轴实际电流I<subgt;d2(k)</subgt;'、I<subgt;q2(k)</subgt;'。接着,根据判断I<subgt;d2(k)</subgt;'与I<subgt;d_th</subgt;的关系来确定最优位置补偿角θ<subgt;op(k)</subgt;,最终获得补偿后的转子位置角θ<subgt;r(k)</subgt;参与运算。本发明所设计算法能有效补偿由于高速低载频比所引起的位置角误差;而且算法均脱离数学模型,拥有较好的鲁棒性。
技术研发人员:俞强,曹鑫,何昊,郝振洋
受保护的技术使用者:南京航空航天大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!