一种基于FPGA的SVPWM控制系统及设计方法与流程
本发明属于航空机电,具体涉及一种基于fpga的svpwm控制系统及设计方法。
背景技术:
1、飞机的操纵和控制主要有液压、eha、ema三种作动系统。目前飞行控制主要采用液压方式,能量来源于飞机发动机驱动泵产生的二次液压能源,通过液压管路传递至目标执行机构。功率电传技术直接通过电缆线传递能量,给机载作动设备的研究带来重大变化。eha和ema作动器作为功率电传技术的重要应用,随着功率电传的发展,将逐步取代传统的液压作动器。
2、svpwm即空间矢量脉冲宽度调制,它是从空间电压矢量的角度出发而得到的一种新型调制技术。相比于一些传统的调制方法,应用svpwm技术进行交流电机调速具有使逆变器输出的谐波成分降低,电机转矩脉动较小,直流电压利用率高等优点。
3、基于fpga技术利用软件编程来设计硬件电路,可以方便的实时改变系统的硬件电路结构,使得产品开发周期缩短以及成本大大降低,整个系统的设计规模和效率都有很大的提高。fpga因其具有丰富的用户i/o口,丰富的逻辑资源,可并行处理数据的能力,设计成果的可重复利用,可移植性强的特点,故在基于现代eda技术和fpga器件,运用现代电机控制理论,进行电机控制器的集成化研究方面已成为电机控制领域的一个重要发展方向,它不仅具有理论意义,而且具有重要的经济意义和战略意义,在民用、军事等领域都会有广阔的用途。
技术实现思路
1、发明的目的:
2、针对背景技术中提出的基于fpga的全数字化伺服系统的需求,提出一种基于fpga的svpwm系统实现方法,该种方法可以将svpwm算法中的位置、速度、电流三种闭环算法集成在一片fpga上实现,并通过在线逻辑分析仪工具对算法运行结果进行实时观测。
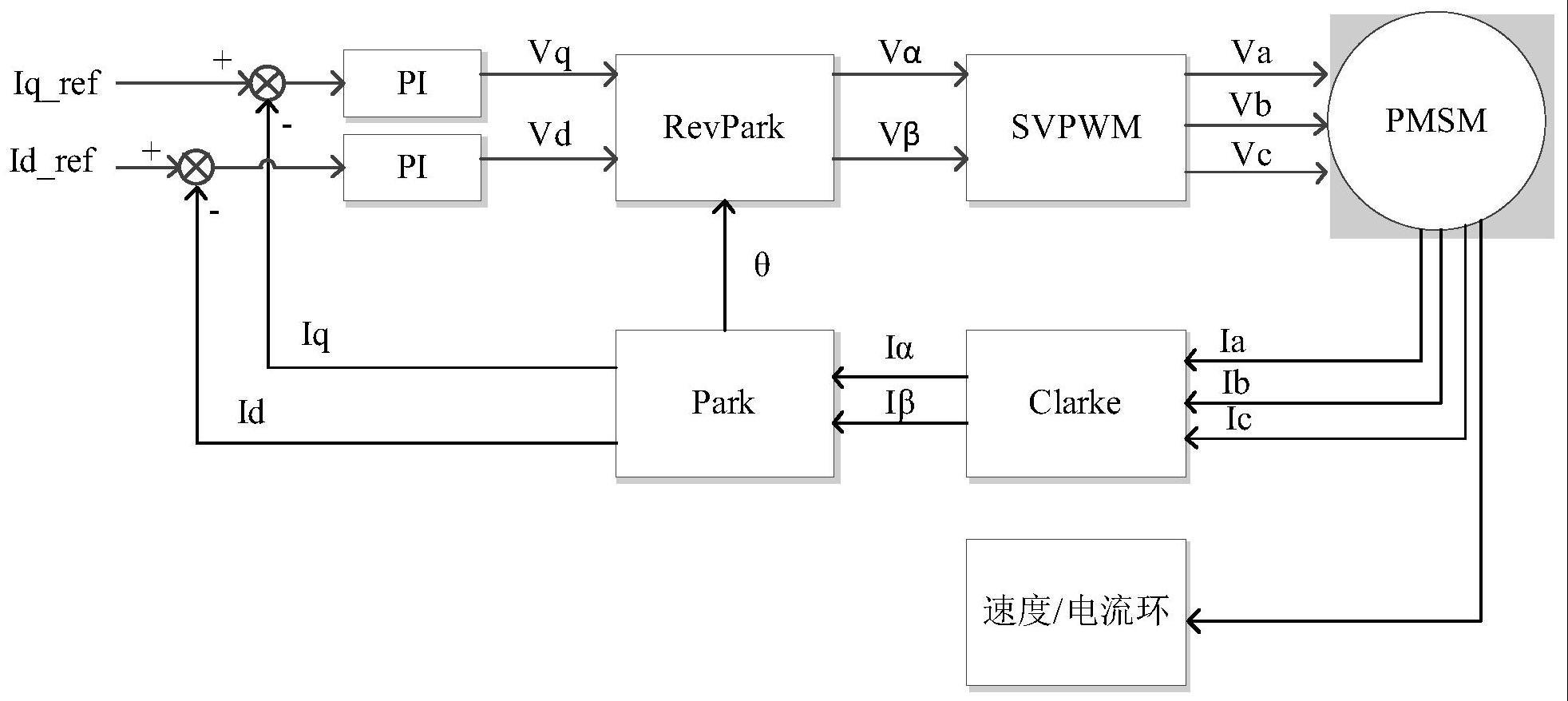
3、发明的技术方案:本发明所提出的一种基于fpga的svpwm控制系统,所述控制系统至少包括:clark变换模块、pi控制模块、park转换模块、park逆变换模块、扇区时间计算模块;
4、所述clark变换模块采集三相正弦波电流,在总功率不变的条件下,将任意时刻三相静止坐标系下的三相正弦波形变化到两相静止坐标系下,并将该数据发送至park转换模块;所述park转换模块将该数据从两相静止坐标系到两相旋转坐标系进行转换,得到两相旋转坐标系的电流信号;所述pi控制模块根据电流信号进行比例-积分控制输出控制结果至逆park变换模块;所述逆park变换模块将pi输出结果从两相旋转坐标转换为两相静止坐标下,并作为扇区时间计算模块的输入,扇区时间计算模块根据输入数据计算扇区以及开关信号占空比;完成svpwm数据处理并输出至电机。
5、进一步的,clark变换模块按以下公式进行计算处理:
6、
7、公式中乘法采用乘法器ip核实现,ia、ib、ic为三相交流正弦波电流;i∝、iβ为静止两相坐标系下电流;定点数据采用q24数制参与计算。
8、进一步的,park转换模块按以下公式进行计算处理:
9、
10、公式中乘法采用乘法器ip核实现,定点数据采用q24数制参与计算;id、iq为两相旋转坐标系下的电流;θ为输入的电角度;正余弦运算采用cordic ip核计算,采用q14定点数制参与计算。
11、进一步的,pi控制模块利用pi调节器进行控制,设pi调节器的输入为e(t),输出为u(t),则表达式为:
12、
13、选用位置型pi调节器,在设计时对数字pi调节器的输出限幅,使pi调节器可以快速退饱和;kp为比例系数,e(k)为两相旋转坐标系下电流的误差值,t为控制周期。
14、进一步的,park逆变换模块按以下公式进行计算处理:
15、
16、公式中乘法采用乘法器ip核实现,定点数据采用q24数制参与计算;
17、u∝、uβ为静止两相坐标系下电压,ud、uq为两相旋转坐标系下的电压;θ为输入的电角度;正余弦运算采用cordic ip核计算,采用q14定点数制参与计算。
18、进一步的,扇区时间计算模块首先要判断矢量位于哪个扇区,然后选择两个基本电压矢量去合成该电压空间矢量;通过以下公式确定扇区:
19、
20、x为x象限电压矢量时间值,y为y象限电压矢量时间值,z为z象限电压矢量时间值;
21、计算扇区号公式为n=a+2b+4c;x>0时,设a=1,否则为0;y>0时,设b=1,否则为0;z>0时,设c=1,否则为0;
22、设t1、t2为两相邻电压矢量的导通时间,则扇区号对应的导通时间见下表:
23、扇区号对应导通时间表
24、
25、本发明还提出了基于fpga的svpwm控制系统的设计方法,所述设计方法包括:
26、a.利用simulink下的模型库以及编写函数等方法实现对svpwm算法的仿真,并以此作为硬件仿真的评价标准;
27、b.采用verilog语言实现svpwm算法模块;
28、c.svpwm算法模块中涉及到大量的乘除、正余弦运算,在fpga中通过调用ip核的方式对涉及到的运算进行处理;
29、d.使用modelsim工具对fpga软件进行功能仿真,仿真结果与simulink模型仿真结果比对,确定算法功能正确性;
30、e.通过chipscope工具对fpga进行板级确认测试,确认svpwm算法的每个功能模块与算法原型、仿真测试结果相符合。
31、进一步的,本发明利用matlab软件在simulink环境下,对永磁同步电机矢量控制系统进行建模与仿真,系统仿真模型如图3所示。仿真主要对矢量控制系统的稳态及动态进行分析,验证算法及整个系统搭建的合理性和正确性。
32、进一步的,本软件算法在100m时钟下进行流水计算处理,对算法中常用的系数常量如等,采用32位q24格式,其二进制表示如下:
33、
34、
35、以该种数制参与算法中所需的各种乘除计算。
36、发明的优点:
37、本发明提供的一种基于fpga的svpwm系统设计与实现方法,与目前常用的dsp+fpga的软件架构相比,优势明显。该方法具有以下优点:
38、1、纯硬件并行处理,计算精确,运算速度快,实时性能高;
39、2、可将三闭环算法集成在一片fpga上实现;
40、3、可在单片fpga上实现多电机并行控制;
41、4、降低系统外围器件数量,减小系统体积,灵活性强;
42、5、系统可移植性强,缩短开发周期。
技术特征:
1.一种基于fpga的svpwm控制系统,其特征在于,所述控制系统至少包括:clark变换模块、pi控制模块、park转换模块、park逆变换模块、扇区时间计算模块;
2.如权利要求1所述的一种基于fpga的svpwm控制系统,其特征在于,clark变换模块按以下公式进行计算处理:
3.如权利要求2所述的一种基于fpga的svpwm控制系统,其特征在于,park转换模块按以下公式进行计算处理:
4.如权利要求3所述的一种基于fpga的svpwm控制系统,其特征在于,pi控制模块利用pi调节器进行控制,设pi调节器的输入为e(t),输出为u(t),则表达式为:
5.如权利要求4所述的一种基于fpga的svpwm控制系统,其特征在于,park逆变换模块按以下公式进行计算处理:
6.如权利要求5所述的一种基于fpga的svpwm控制系统,其特征在于,扇区时间计算模块首先要判断矢量位于哪个扇区,然后选择两个基本电压矢量去合成该电压空间矢量;通过以下公式确定扇区:
7.一种基于fpga的svpwm控制系统的设计方法,其特征在于,所述设计方法包括如下步骤:
8.如权利要求7所述的一种基于fpga的svpwm控制系统的设计方法,其特征在于,利用matlab软件在simulink环境下,对永磁同步电机矢量控制系统进行建模与仿真,仿真主要对矢量控制系统的稳态及动态进行分析,验证算法及整个系统搭建的合理性和正确性。
9.如权利要求7所述的一种基于fpga的svpwm控制系统的设计方法,其特征在于,在100m时钟下进行流水计算处理,对算法中常用的系数常量采用32位q24格式,其二进制表示如下:
技术总结
本发明提出一种基于FPGA的SVPWM控制系统及设计方法;系统包括:Clark变换模块、PI控制模块、Park转换模块、Park逆变换模块、扇区时间计算模块;Clark变换模块采集三相正弦波电流,在总功率不变的条件下,将任意时刻三相静止坐标系下的三相正弦波形变化到两相静止坐标系下,并将该数据发送至Park转换模块;Park转换模块将该数据从两相静止坐标系到两相旋转坐标系进行转换,得到两相旋转坐标系的电流信号;PI控制模块根据电流信号进行比例‑积分控制输出控制结果至逆Park变换模块;逆Park变换模块将PI输出结果从两相旋转坐标转换为两相静止坐标下,并作为扇区时间计算模块的输入,扇区时间计算模块根据输入数据计算扇区以及开关信号占空比;完成SVPWM数据处理并输出至电机。
技术研发人员:刘晨晨,张庆航
受保护的技术使用者:中国航空工业集团公司金城南京机电液压工程研究中心
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!