直流无刷电机霍尔在线容错控制方法、存储介质及终端与流程
本发明涉及电机在线容错控制,尤其涉及一种直流无刷电机霍尔在线容错控制方法、存储介质及终端。
背景技术:
1、直流无刷电机广泛应用于航空航天环境的电液系统流量、压力控制,电机转速控制用以解决大调速比转速高精度控制。在航空航天应用环境中,高低温冲击、振动、负载波动等对电机控制器提出了更高的可靠性要求。
2、电机控制系统故障主要包括电机绕组故障、控制器驱动电路故障、电机位置传感器(即霍尔传感器)故障。飞行环境中的霍尔传感器故障将带来电机转速采集失效、驱动器换向序列错误,造成控制系统失效的严重影响。现阶段对霍尔故障的判定方法主要为超出6种状态的判定,其方法的判定不能定位具体错误,且硬刹车的处理方式不能应用于航空航天环境的飞行过程处理。现阶段对容错控制方法为基于历史值的线性划分,在变转速条件下并不能准确估计。现有技术目前存在以下缺陷:
3、公告号为cn103424651b、名称为“一种霍尔位置传感器故障检测方法”发明专利,其方法包括对变量初始化,然后给定适当占空比pwm,控制电机旋转结束后比对观察数组,综合判定霍尔状态及故障,然而其仅适用于非工作环境下的霍尔状态监测及故障定位。
4、公告号为cn103414430b、名称为“一种霍尔位置传感器故障急救方法”的发明专利,其方法包括以电机转动两圈作为一个检测周期,分析观察数组中霍尔0或1状态用以故障定位;然而其需要电机转动两圈为一个检测周期,然而当霍尔故障发生时,逻辑驱动电路的三相输出逻辑错乱,电机系统将发生严重抖动甚至停转、堵转等以致驱动电路烧毁的风险,两圈的检测周期无法适应于空天工作环境。
5、公告号为cn109687809b、名称为“一种无刷直流电机霍尔传感器实时故障识别重构系统和方法”发明专利,该方法为采样置信区间模块接收电机的设定转速输入用以计算霍尔置信区间,重构判别模块通过置信区间与电机转速判别是否需要重构,后续采用重构方法重构失效的霍尔路。该专利通过电机的设定转速计算置信区间的方法仅适用于固定转速的电机控制,且要求驱动器输出与电机转速呈线性关系。在电液控制系统中,存在负载波动和工况变化,多采用pid等闭环控制方法,实际转速与设定转速需经过计算后输出调节,并不时刻一致。负载波动及宽范围转速调节正是霍尔故障高频发生的地方,该方法不适应变转速的在线诊断及容错控制。
技术实现思路
1、本发明的目的在于克服现有技术的问题,提供了一种直流无刷电机霍尔在线容错控制方法、存储介质及终端。
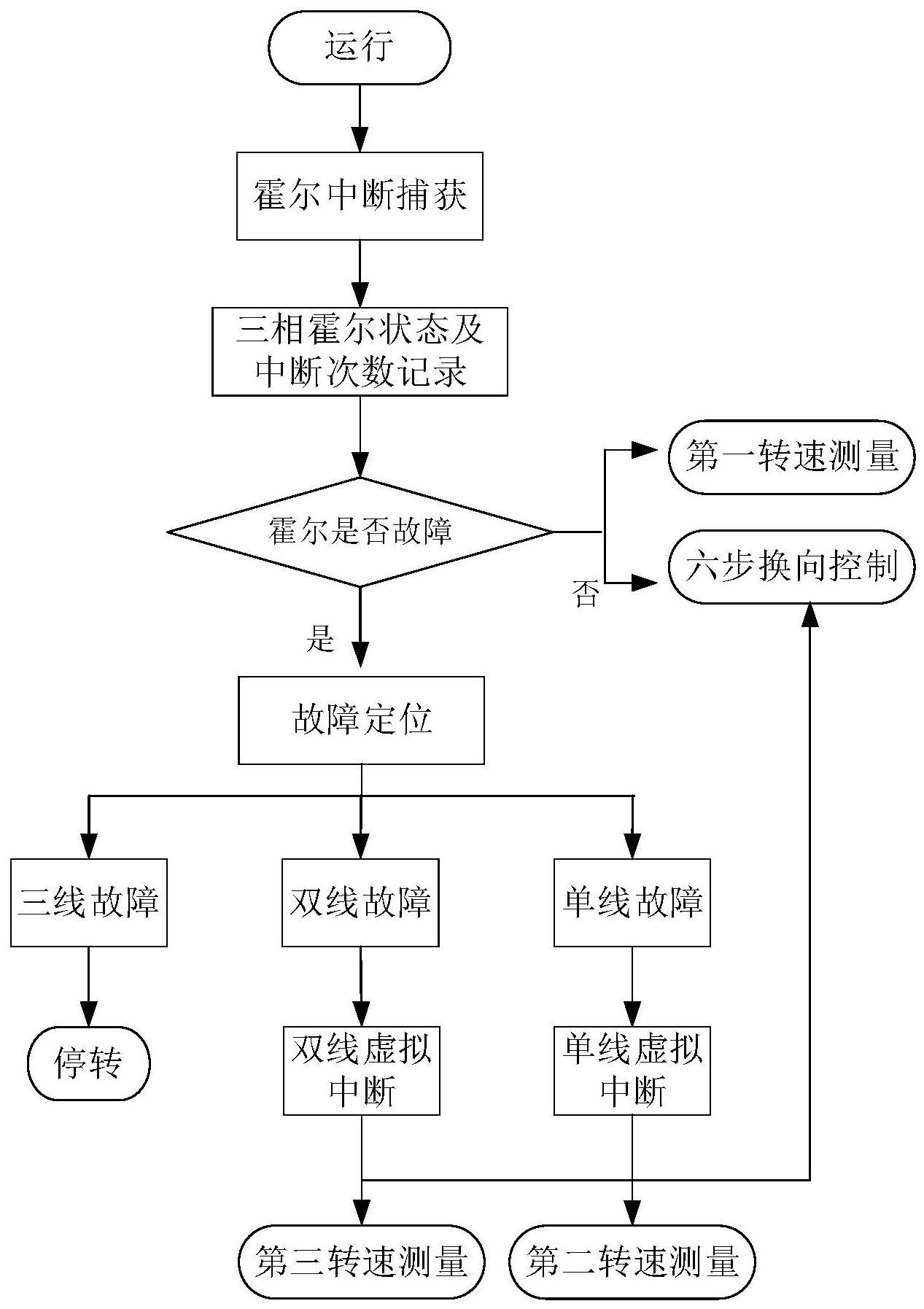
2、本发明的目的是通过以下技术方案来实现的:一种直流无刷电机霍尔在线容错控制方法该方法包括以下步骤:
3、采集三相霍尔传感器每次发生中断捕获时的电平信息;
4、根据三相霍尔传感器的电平序列跳变信息和/或三相霍尔传感器中断捕获次数序列确定是否发生故障;
5、若在无负载波动工况下发生故障,根据区间功率比和区间时间线性关系得到估计值产生虚拟中断;根据正常工作霍尔中断,或正常工作霍尔中断结合虚拟中断进行电机六步换向逻辑控制;
6、若在负载波动条件下发生故障,根据区间功率比和区间时间线性关系得到估计值,以发生故障前一区间扰动差值与估计值之和作为虚拟中断;根据正常工作霍尔中断,或正常工作霍尔中断结合虚拟中断进行电机六步换向逻辑控制。
7、在一示例中,所述方法还包括工况确定步骤:
8、当ηi-1ti-1=ηi-2ti-2时,为无负载波动工况;
9、当ηi-1ti-1>ηi-2ti-2或ηi-1ti-1<ηi-2ti-2时,为负载波动工况;
10、其中,ti-1表示霍尔传感器在发生故障前一区间的运行时间;ti-2表示霍尔传感器在发生故障前二区间的运行时间;ηi-1为发生故障前一区间的功率比;ηi-2为发生故障前二区间的功率比。
11、在一示例中,根据三相霍尔传感器中断捕获次数序列确定是否发生故障包括:
12、霍尔传感器hall_a、hall_b、hall_c进入中断时分别记na_irqn=0、nb_irqn=0、nc_irqn=0;
13、对于其中任一相霍尔传感器,其他霍尔传感器中断发生时,该相霍尔传感器的序列次数n=n+1;
14、若产生n=0、n=1、n=2的循环序列,则表明三相霍尔传感器正常工作;若其中一相霍尔传感器的序列次数n>2,该相霍尔故障失效,发生单线故障;
15、在已知一相霍尔传感器故障的前提下,其他两项霍尔传感器的序列次数为n=0、n=1的循环序列,若n>1,则该相霍尔故障失效,发生双线故障。
16、在一示例中,当发生单线故障时,在无负载波动工况下虚拟中断为:
17、
18、其中,ti表示发生故障区间的虚拟中断;ti-1表示霍尔传感器在发生故障前一区间的运行时间;η表示区间脉宽调制功率比;ηi表示发生故障区间的脉宽调制功率比;ηi-1为发生故障前一区间的脉宽调制功率比;
19、当发生单线故障时,在负载波动工况下虚拟中断为:
20、
21、
22、其中,ti-2表示霍尔传感器在发生故障前二区间的运行时间;ηi-2为发生故障前二区间的功率比。
23、在一示例中,当发生双线故障时,在无负载波动工况下,在当前半周期内需产出两个虚拟中断,分别记tk_1、tk_2,构建一阶比例式:
24、
25、且其中,tk表示当前霍尔半周期运行时间;ηk表示当前霍尔半周期功率比;ηk-1表示前一霍尔半周期功率比;tk-1表示前一霍尔半周期运行时间;
26、故障霍尔线分别取虚拟中断tk_1、tk_2以估计该扇区时间,进行故障线路的虚拟中断;
27、当发生双线故障时,在负载波动工况下,当前霍尔半周期运行时间tk为:
28、
29、
30、其中,ηk-2表示前二霍尔半周期功率比;tk-2表示前二霍尔半周期运行时间;
31、构建一阶比例式:
32、
33、故障霍尔线分别取虚拟中断tk_1、tk_2以估计该扇区时间,进行故障线路的虚拟中断。
34、在一示例中,若未发生故障,电机转速v计算式为:
35、
36、其中,n表示电机极对数;f表示霍尔中断捕获定时器基本计时频率;tbc、tab、tca、tbc、tab、tca为转子分别在六个扇区的运行时间。
37、在一示例中,当发生单线故障时,电机转速v计算式为:
38、
39、其中,n表示电机极对数;f表示霍尔中断捕获定时器基本计时频率;tab、tba分别为转子在故障扇区前一、前二区间的运行时间。
40、在一示例中,当发生双线故障时,电机转速v计算式为:
41、
42、其中,n表示电机极对数;f表示霍尔中断捕获定时器基本计时频率;thall/2为正常工作的霍尔单线两次捕获值,即一个霍尔半周期。
43、需要进一步说明的是,上述方法各示例对应的技术特征可以相互组合或替换构成新的技术方案。
44、本发明还包括一种存储介质,其上存储有计算机指令,所述计算机指令运行时执行上述任一示例或多个示例组成形成的所述直流无刷电机霍尔在线容错控制方法的步骤。
45、本发明还包括一种终端,包括存储器和处理器,所述存储器上存储有可在所述处理器上运行的计算机指令,所述处理器运行所述计算机指令时执行上述任一示例或多个示例形成的所述直流无刷电机霍尔在线容错控制方法的步骤。
46、与现有技术相比,本发明有益效果是:
47、本发明根据霍尔传感器在电机控制过程中的机械位置为依据,根据霍尔中断的发生逻辑得到检测中断序列次数,进而准确判定霍尔故障并定位;在产生故障时采用的虚拟中断方法,利用区间功率比和区间时间(即区间转速)线性关系计算得到当前扇区估计值,在变转速情况下依然能够达到较高的时间精度,在加速及减速情况下虚拟中断的估计时间误差都很小,在负载波动情况下加入扰动补偿值以提高虚拟中断时间估计值精度;根据虚拟中断进行电机六步换向逻辑控制,以霍尔机械工作原理为依据,在故障发生时仅延误一个工作扇区的换向控制,其后回归正常工作序列,为系统提供了应急状态下的可靠容错控制,为在线容错控制方法,能够适用于航空航天环境。
- 还没有人留言评论。精彩留言会获得点赞!