一种分布式新能源互联微电网集群振荡控制方法
本发明涉及多源互联微电网系统稳定控制,特别是涉及一种分布式新能源互联微电网集群振荡控制方法。
背景技术:
1、随着双碳目标的提出与能源发展要求的不断提高,优先发展可再生能源是推动我国能源供给革命,实现高质量可持续发展的必由之路。分布式发电技术是高效利用可再生能源的供能手段,当前主要包含风力发电、光伏发电、储能和微型燃气轮机等形式。这些分布式电源大量采用具有弱阻尼惯量特征的电力电子变换器接入系统,在一定程度上提高了响应速度,但却降低了系统阻尼,尤其是当其自主运行时,由于缺乏上级大电网的支撑,需自我维持频率电压稳定,再加上其小容量、低惯性的特征,此时一个微小的故障也可能导致系统性能受到巨大影响。同时,以风电、光伏为代表的可再生能源,由于其随机性和间接性的特征将会引发功率波动造成系统的频率偏移,严重影响系统的供电质量,对系统的安全稳定运行带来了严峻挑战。
2、互联微电网系统中包含不同类型的微电源和负荷,极易产生微电源间的交互作用、动态负荷间的交互作用、微电源与负荷间的交互作用等,在遭遇扰动时容易产生振荡甚至失稳,多种控制主体可能同时参与系统振荡。因此,针对新能源发电机组高渗透率的多源互联微电网系统,研究其在不同扰动场景下的动态响应特性以及设计一种抑制振荡的方法显得尤为重要。
3、目前在实际电力系统中普遍以同步发电机的励磁调节器加装电力系统稳定器(power system stabilization,pss)为主要阻尼控制器,但pss对于低频振荡特别是区间振荡并不总是有效,加之随着以风电和光伏等新能源发电渗透率越来越高,传统阻尼控制手段将难以独立应对电力系统运行特性出现的新变化。同时,在以电力电子变换器为主导的多源互联微电网系统的振荡抑制策略中,主要分为附加装置或控制回路附加额外阻尼以及优化控制参数设计,这些控制方法均存在面临在工况复杂多变时适应性不强的问题。而且目前已有的新能源附加阻尼控制主要针对一种风电或光伏发电机组展开,针对多源互联微电网系统的新能源机组特性的协同阻尼控制研究并不多。为充分发掘新能源发电在参与抑制多源互联微电网系统振荡方面的潜力,需要在考虑新能源机组特性基础上设计更具工况适应性的控制策略,以适应未来新型电力系统以分布式风电、光伏发电单元为主导的发展趋势。
4、现有技术公开了一种孤岛微电网系统及其交互振荡抑制方法、系统,源侧虚拟同步机和负载侧虚拟同步机结合起来提供虚拟惯性和阻尼。该发明提出了一种d轴电感电流前馈控制和d轴电压反馈控制的方法来重塑vsg的阻抗,以减小vsg的阻抗幅值。因此,vsg和lvsm之间的低频交互作用可以得到抑制。该现有技术中针对的是单个微电网系统包含多个相同的电压源型换流器,且并未考虑新能源机组的特性,将直流侧用恒定电压源替代,此外,该方案采用附加控制方法中的虚拟同步机方法为系统提供虚拟惯性和阻尼,但却忽视了新能源机组的随机性可能造成系统阻尼特性随着复杂运行工况的变化而变化,故该控制方案与多变运行方式之间存在不适应性。
技术实现思路
1、本发明的目的是:提供一种分布式新能源互联微电网集群振荡控制方法,以解决现有技术中存在的新能源机组的随机性与间歇性对于系统存在影响,基于附加控制方法在扰动较大或存在不确定性导致运行工况发生改变时,其设计的振荡抑制控制器难以保证抑制效果,缺乏工况适应性的问题。
2、为了实现上述目的,本发明提供了一种分布式新能源互联微电网集群振荡控制方法,包括:
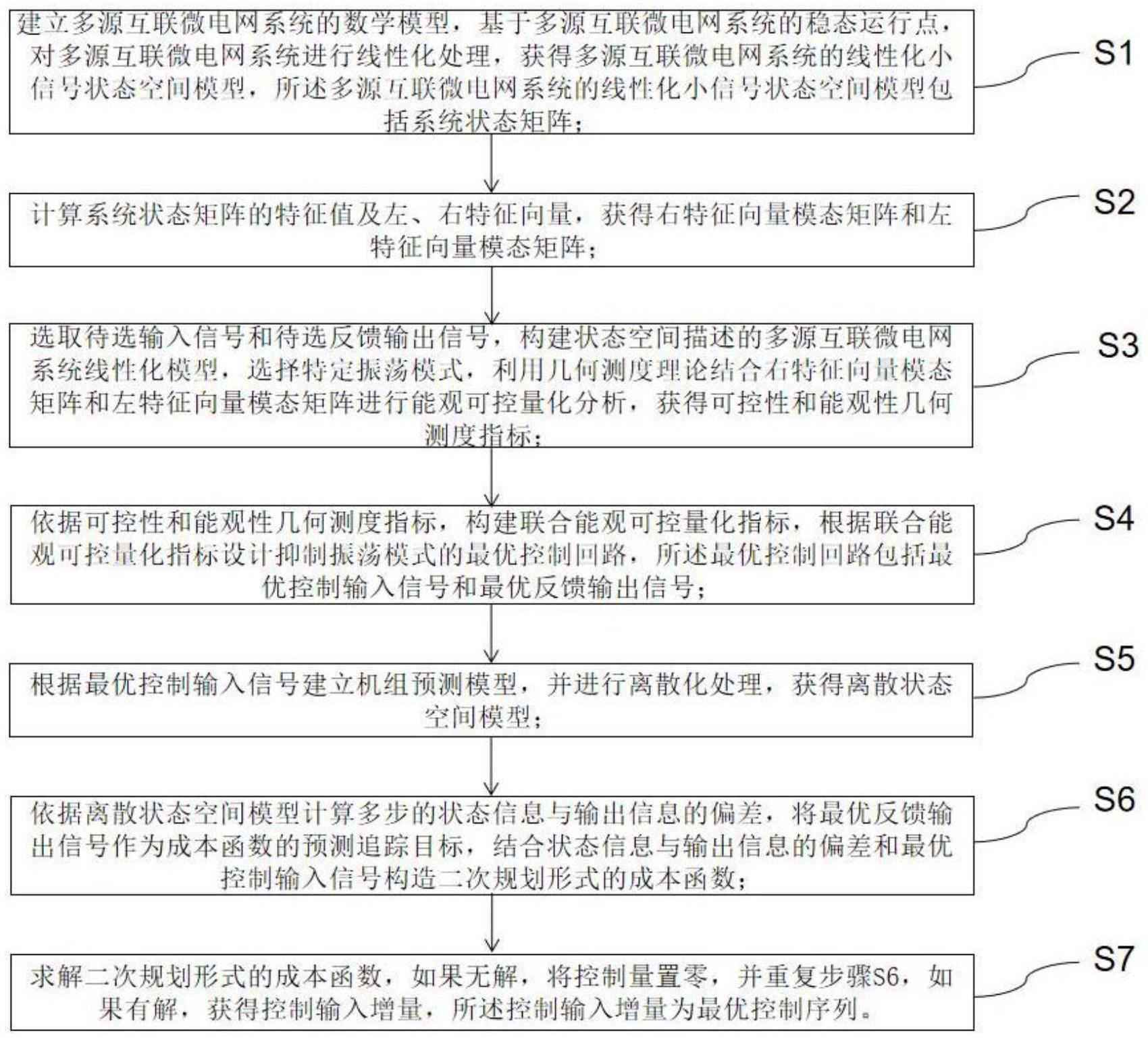
3、s1、建立多源互联微电网系统的数学模型,基于多源互联微电网系统的稳态运行点,对多源互联微电网系统进行线性化处理,获得多源互联微电网系统的线性化小信号状态空间模型,所述多源互联微电网系统的线性化小信号状态空间模型包括系统状态矩阵;
4、s2、计算系统状态矩阵的特征值及左、右特征向量,获得右特征向量模态矩阵和左特征向量模态矩阵;
5、s3、选取待选输入信号和待选反馈输出信号,构建状态空间描述的多源互联微电网系统线性化模型,选择特定振荡模式,利用几何测度理论结合右特征向量模态矩阵和左特征向量模态矩阵进行能观可控量化分析,获得可控性和能观性几何测度指标;
6、s4、依据可控性和能观性几何测度指标,构建联合能观可控量化指标,根据联合能观可控量化指标设计抑制振荡模式的最优控制回路,所述最优控制回路包括最优控制输入信号和最优反馈输出信号;
7、s5、根据最优控制输入信号建立机组预测模型,并进行离散化处理,获得离散状态空间模型;
8、s6、依据离散状态空间模型计算多步的状态信息与输出信息的偏差,将最优反馈输出信号作为成本函数的预测追踪目标,结合状态信息与输出信息的偏差和最优控制输入信号构造二次规划形式的成本函数;
9、s7、求解二次规划形式的成本函数,如果无解,将控制量置零,并重复步骤s6,如果有解,获得控制输入增量,所述控制输入增量为最优控制序列。
10、优选的,在步骤s1中,所述多源互联微电网系统的数学模型为:
11、
12、其中,x=[xsg1,xwt1,xpv1,xess1…xsgi,xwti,xpvi,xessi,xline,xload]t为互联微电网系统中各微电源、线路及负荷的状态变量,n表示为系统状态量的个数,u为系统的输入变量,f表示为描述系统状态量的微分量与系统状态变量和输入变量关系的函数。
13、优选的,所述多源互联微电网系统的数学模型包括同步机的动态模型、新能源机组的一次能源动态模型和逆变器的三环控制模型;
14、所述同步机的动态模型包括同步机机组主电路模型和同步机机组控制电路模型,所述同步机机组主电路模型为:
15、
16、
17、其中,δ和ωr为sbdg的功角和转子角速度;m和d为转子惯量系数及阻尼系数;pe和qe分别为sbdg输出的有功功率和无功功率;pm为同步发电机机械功率;ωcom为互联微电网系统公共坐标轴参考角速度;vq和vq'为交轴空载电动势和暂态电动势;vfd和vf分别为励磁电压和下垂励磁环节输出电压;xd和x'd分别为额定频率ωn下发电机的直轴电抗和直轴暂态电抗;td'o为转子时间常数;vt=[vtd vtq]t表示为sbdg端口电压;it=[itd itq]t表示为输出电流;
18、所述同步机机组控制电路模型为:
19、
20、
21、其中,vexc、k、τ分别为延迟环节输出电压、增益系数和延时系数;vn、ωn为系统额度电压和角速度;vref、ωref为电压和角速度参考值;tg、ψ1/ψ2/ψ3/ψ4均为速度中间控制器状态量;k1和t1/t2为调节器增益及其时间常数;t3/t4/t5为制动器时间常数;td为同步发电机时间延迟;
22、针对基于逆变器类分布式电源,新能源机组的一次能源动态模型包括风力发电机组的风机及其传动系统模型和光伏发电机组的一次能源动态与直流电容电压动态模型,所述风机及其传动系统模型为:
23、
24、
25、其中,ωwt、ωr、hwt、hg分别为风力机和异步电机转速和惯量系数;kg、f、ktg、dtg、tsh分别表示为齿轮箱传动比、摩擦系数、机械刚度、阻尼系数和机械轴转矩;twt、te分别为风力机转矩和电磁转矩;ρ、r、v、p、cp分别表示为空气密度、叶片长度、风速、极对数和风能利用系数;表示为定子磁通;is=[isd isq]t表示为定子电流;
26、所述一次能源动态与直流电容电压动态模型为:
27、
28、其中,vdc、ipv、cdc分别为光伏直流侧电压、电流和电容;np、ns、nc分别是光伏系统串联数量、每串串联的模块数量和每个光伏组件的串联电池数量;irs和iph分别为p-n结反向饱和电流和每串pv板的短路电流;q、k、tt、aif分别为单位电荷、玻尔兹曼常数、温度及理想因子;
29、所述逆变器的三环控制模型为:
30、
31、
32、
33、
34、其中,vod、voq、iod、ioq分别为dq参考系下的逆变器输出电压和电流;mp、nq为下垂环输出参考电压、有功下垂系数和无功下垂系数;ψd、ψq为电压控制器积分项的状态变量;γd、γq为电流控制器积分项的状态变量;为逆变器出口电流参考值;ildq为逆变器出口实际电流。
35、优选的,在步骤s1中,所述多源互联微电网系统的线性化小信号状态空间模型为:
36、
37、其中,anmg是系统状态矩阵。
38、优选的,在步骤s2中,所述计算系统状态矩阵的特征值及左右特征向量的公式为:
39、
40、其中,分别是对应λi的右特征向量和左特征向量,对于同一特征值归一化处理后有而对于不同特征值的左右特征向量则满足关系式不同特征值λ1,λ2,...λn对应的右特征向量模态矩阵φ和左特征向量模态矩阵表示为:
41、
42、优选的,在步骤s3中,所述选取待选输入信号和待选反馈输出信号的方法包括工程实际选取或参与因子分析结果进行选取,所述参与因子为状态量对于某一振荡模态的影响力或者贡献度的大小。
43、优选的,在步骤s3中,所述状态空间描述的多源互联微电网系统线性化模型为:
44、
45、优选的,在步骤s3中,所述获得可控性和能观性几何测度指标的公式为:
46、
47、其中,bk为输入矩阵bnmg的第k列,cl为输出矩阵cnmg的第l行,为输入向量bk与左特征向量之间的夹角,为输出向量cl与右特征向量φi之间的夹角;
48、在步骤s4中,所述联合能观可控量化指标为:
49、gcoi(k,l)=gci(k)·goi(l)。
50、优选的,在步骤s5中,所述离散状态空间模型为:
51、
52、其中,ad、bd均为离散化处理后所获得的离散状态矩阵及离散输入矩阵;δu*(k)为选取的针对该特定振荡模式且不影响其它振荡抑制作用的最优控制输入信号。
53、优选的,在步骤s6中,二次规划形式的成本函数为:
54、
55、subject to aiδui≤bi aeq,iδui=beq,i
56、与现有技术相比,本发明的有益效果在于:对于多源互联微电网系统的振荡问题,采用了几何测度理论,分析了待选输入信号及待选反馈输出信号的综合可控性以及能观性,获取抑制特定振荡模式的最优控制回路,能够避免控制器之间的作用冲突;考虑到系统多种约束情况下构成二次规划形式的成本函数,形成抑制多源互联微电网系统的振荡的稳定控制策略,能够在线实现振荡抑制作用,更具工况适应性;
57、进一步地,考虑了基于同步机类分布式电源和基于逆变器类分布式电源这两类微电源,同时对于新能源发电机组考虑到供能部分动态和机侧换流器控制特性,进而能够减少新能源机组的随机性与间歇性对于系统的影响。
- 还没有人留言评论。精彩留言会获得点赞!