基于数字孪生模型的三相永磁同步电机参数估计方法
本发明涉及永磁同步电机数字孪生应用研究领域,具体涉及基于数字孪生模型的三相永磁同步电机参数估计方法。
背景技术:
1、永磁同步电机(pmsm)以其高功率密度、卓越的效率和优异的可控性,在轨道牵引运输、电动汽车等众多领域得到了广泛的应用;永磁同步电机的参数在电机控制和状态监测中具有重要意义;然而,电机制造商通常不披露电机的关键参数,如定子电阻、电感和磁链;此外,电机参数根据工况不同而不同;因此,有必要采用适当的参数估计方法来获取永磁同步电机的参数。
2、已有很多参数估计方法被提出;其中,使用特制的测量仪器是基于数字孪生模型的三相永磁同步电机参数估计方法比较有效的方法;此外,利用已有信号进行参数估计的方法是最为广泛的;例如,递归最小二乘(rls)、扩展卡尔曼滤波(ekf)、模型参考自适应系统(mras)以及基于观测器的方法都是利用已有信号进行永磁同步电机的参数估计,并且都主要根据系统的物理模型进行分析估计;随着人工智能的发展,基于数据驱动的方法也是实现参数估计的基于数字孪生模型的三相永磁同步电机参数估计方法有效手段,而数据驱动需要大量的数据来训练模型,这在当前的电力电子领域来说较难实现。
技术实现思路
1、为了解决上述现有技术中存在的问题,本发明拟提供了基于数字孪生模型的三相永磁同步电机参数估计方法,拟解决现有技术无法有效估计三相永磁同步电机参数的问题。
2、基于数字孪生模型的三相永磁同步电机参数估计方法,包括以下步骤:
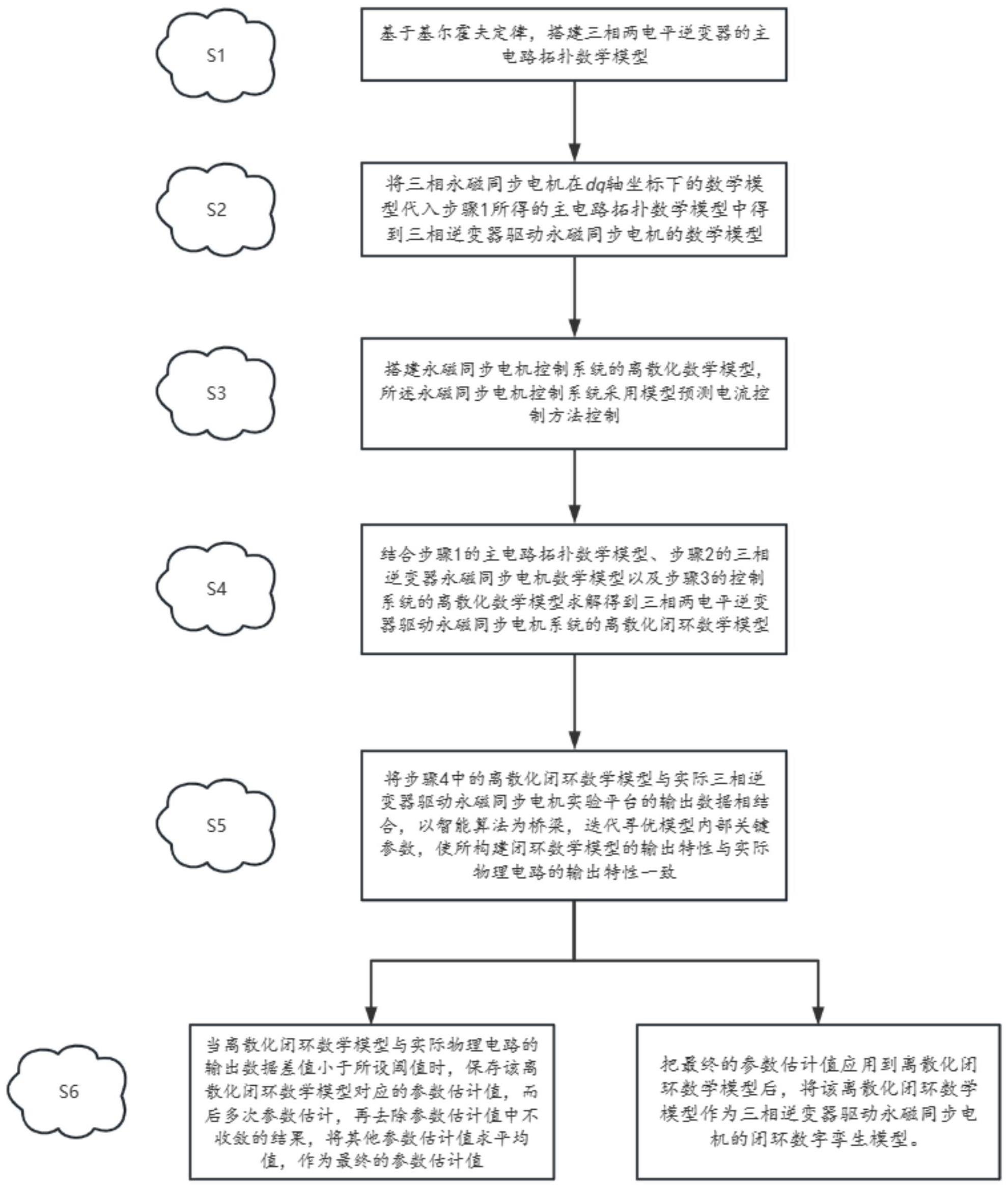
3、步骤1:基于基尔霍夫定律,搭建三相两电平逆变器的主电路拓扑数学模型;
4、步骤2:将三相永磁同步电机在dq轴坐标下的数学模型代入步骤1所得的主电路拓扑数学模型中,再利用四阶runge-kutta法对该模型进行求解得到三相逆变器驱动永磁同步电机的数学模型;
5、步骤3:搭建永磁同步电机控制系统的离散化数学模型,所述永磁同步电机控制系统采用模型预测电流控制方法控制;
6、步骤4:结合步骤1的主电路拓扑数学模型、步骤2的三相逆变器永磁同步电机数学模型以及步骤3的控制系统的离散化数学模型,再利用四阶runge-kutta法对所结合的数学模型进行求解,最终得到三相两电平逆变器驱动永磁同步电机系统的离散化闭环数学模型;
7、步骤5:将步骤4中的离散化闭环数学模型与实际三相逆变器驱动永磁同步电机实验平台的输出数据相结合,以智能算法为桥梁,迭代寻优模型内部关键参数,使所构建闭环数学模型的输出特性与实际物理电路的输出特性一致;
8、步骤6:当离散化闭环数学模型与实际物理电路的输出数据差值小于所设阈值时,保存该离散化闭环数学模型对应的参数估计值,而后多次参数估计,再去除参数估计值中不收敛的结果,将其他参数估计值求平均值,作为最终的参数估计值。
9、优选的,所述步骤6还包括:把最终的参数估计值应用到离散化闭环数学模型后,将该离散化闭环数学模型作为三相逆变器驱动永磁同步电机的闭环数字孪生模型。
10、优选的,所述步骤1中,所述主电路拓扑数学模型为:
11、
12、其中,uan、ubn、ucn分别为三相相电压,si代表功率开关ti的驱动信号,其中1为开通,0为关断,所述a1、a2、b1、b2、c1、c2如下:
13、
14、其中,udc是直流侧电压,ik,sign是相电流(k=a,b,c)。
15、优选的,所述步骤2中,三相永磁同步电机由三相逆变器供电,其dq轴数学模型表示为:
16、
17、其中,id,iq分别为dq轴电流,ud,uq分别为dq轴电压,r为定子磁链,ld,lq分别为dq轴电感,ψf为磁链,ωe为电角速度;所述dq坐标轴由abc坐标轴变换而来,变换公式如下:
18、
19、其中,θe为转子位置角;
20、将上述模型代入步骤1所得三相两电平逆变器的主电路拓扑数学模型,可得三相逆变器驱动永磁同步电机的数学模型,再利用四阶runge-kutta法求解该模型,具体包括以下步骤:
21、将模型微分方程改写为:
22、
23、其中,n为当前时刻电流大小,n+1为下一时刻电流大小,h为从n时刻到n+1时刻的计算步长,ka1-ka4,kb1-kb4通过以下式子计算:
24、
25、优选的,所述步骤3包括以下步骤:
26、转速外环为pi控制,电流内环采用模型预测控制,找出最优电压矢量,搭建控制系统的离散化数学模型:
27、
28、其中,ωerr为转速误差,ωref为参考转速,ω为转速,kp和ki为pi参数,t为控制周期;下标k+1表示下一时刻,下标k表示当前时刻,表示iq的期望值;表示id的期望值。
29、优选的,所述步骤4中,三相两电平逆变器驱动永磁同步电机系统的离散化闭环数学模型为:
30、
31、其中n为当前时刻值,n+1为下一时刻值。
32、优选的,所述步骤5包括以下步骤:
33、搭建三相两电平逆变器驱动永磁同步电机实验平台,采集其稳态与动态运行的输出特性数据作为数字孪生模型的输入,将孪生模型与实际系统的输出特性的差值作为粒子群算法的迭代目标函数,即:
34、
35、其中,fobj为目标函数,n为采样样本大小,iam,ibm,icm为三相电流实测值,ia,ib,ic为数字孪生输出三相电流;
36、计算每个粒子当前的fobj,记录本次迭代的个体最优解和全局最优解,然后根据粒子的初始速度、自身对最优解的认知以及其他粒子对最优解认知,更新粒子的速度和位置,计算更新后的fobj,进而更新个体最优解和全局最优解;重复此过程,迭代寻优模型内部关键参数,使闭环数学模型的输出特性逼近实际物理电路的输出特性,此处考虑的关键参数指步骤2中选取的参数;粒子每次更新速度和位置的原则为:
37、
38、其中i为迭代次数,j为粒子数,vi,j为第i次迭代中第j个粒子的移动速度;pi,j是第i次迭代中第j个粒子的位置;gbest和pbest分别代表全局最佳粒子和个人最佳粒子;ω、r1、r2、c1和c2是参数;ω为惯性系数,ω越大意味着粒子越倾向于选择先前的运动路径;c1为个体学习因子,其值越大表示粒子越倾向于选择之前的个体最优解;c2是群体学习因子,c2越大表示粒子选择全局最优解的可能性越大;r1和r2是[0,1]之间的随机数;
39、为了降低粒子群算法陷入局部最优的概率,将混沌引入到粒子群中;当迭代到一定次数时,首先通过下式将全局最优粒子gbest转换到(0,1)区间中:
40、
41、其中,x是粒子的维度,bx和ax分别为粒子的上下界;
42、然后,通过logistic方程得到混沌序列:
43、zx,y+1=μ(1-zx,y)zx,y,y=1,2…
44、其中,zx,y表示第y次迭代的第个x混沌变量;μ为控制参数,通常取4,整个系统处于完全混沌状态;
45、最后,通过下式将混沌序列返回到原解空间,并重新计算目标函数,并更新gbest和pbest:
46、pi,y=zy(b-a)+a。
47、本发明的有益效果包括:
48、1)对比现有的建模方法,本发明构建了具有控制系统的三相两电平逆变器驱动永磁同步电机完整的闭环模型,并且利用四阶runge-kutta法求解模型,降低模型求解的复杂度,此外,利用混沌算法降低粒子群算法陷入局部最优的概率;
49、2)所构建数字孪生模型可有效模拟实际系统的稳态与动态运行状态,输出与实际物理系统一致的外特性波形,帮助用户更便捷的理解和调试系统,并指导永磁同步电机控制系统的控制参数设计与运行状态预测;
50、3)所提出的参数估计与数据处理方法可实现永磁同步电机关键参数的有效监测,最终定子电阻估计误差10%左右,定子电感及磁链估计误差均为10%左右,所有参数都是同时获取;并且在暂态和稳态中都能很好的对参数进行估计。
- 还没有人留言评论。精彩留言会获得点赞!