无刷直流电机控制方法与流程
本技术涉及电机控制,尤其涉及一种无刷直流电机控制方法。
背景技术:
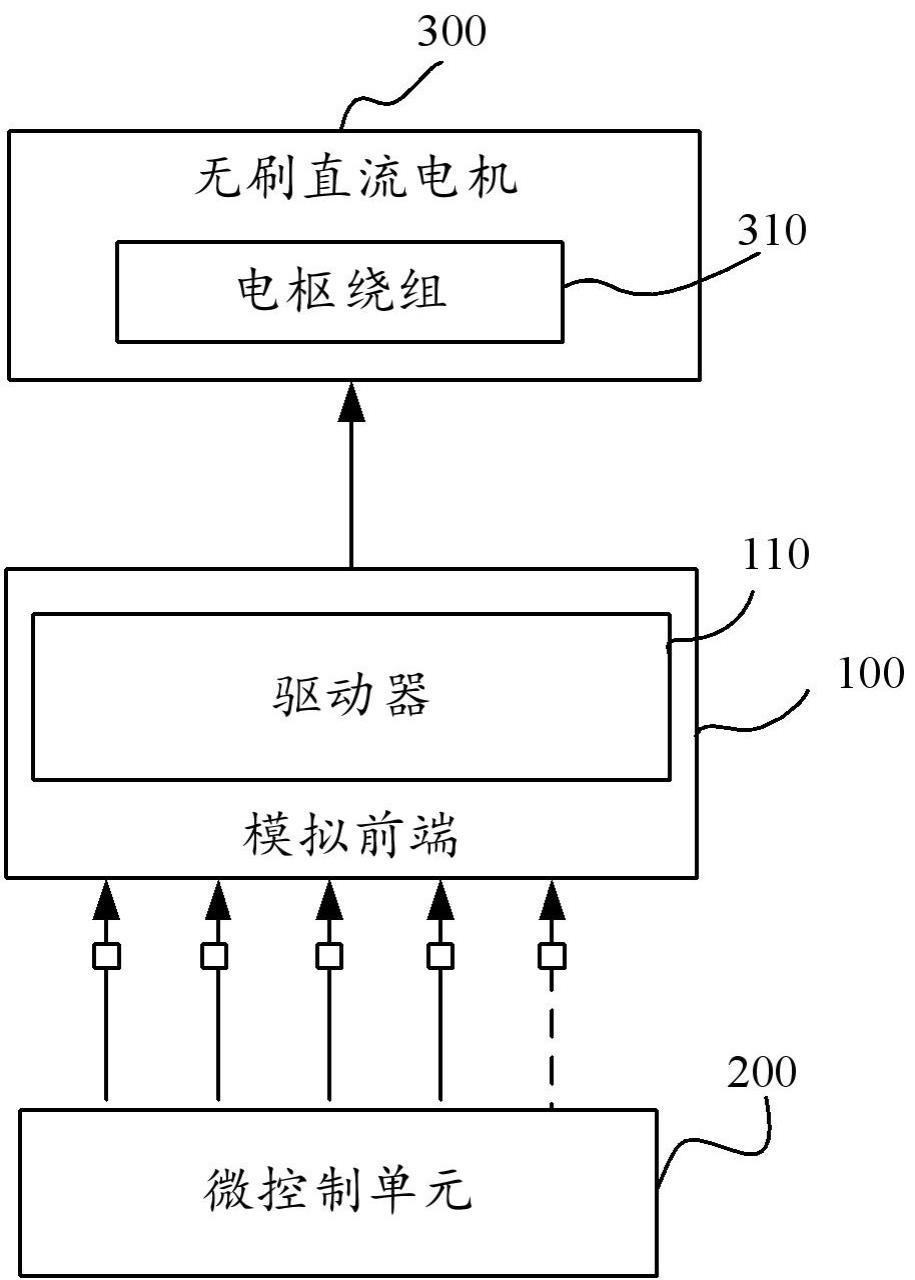
1、无刷直流电机(brushless direct current,bldc)是一种典型的机电一体化产品。无刷直流电机是新能源车中必不可少的组成部分。常常利用驱动系统驱动无刷直流电机,使得无刷直流电机工作。目前,驱动系统包括微控制单元(micro control unit,mcu)和驱动器。一般情况下,微控制单元和驱动器分别采用不同的芯片进行设计,这会导致驱动系统的体积庞大,无法满足新能源车小型化的需求。因此,将驱动器和微控制单元集成于同一个芯片的设计应运而生。
2、传统技术中,驱动器集成在模拟前端中,模拟前端和微控制单元可采用晶圆的方式合封在一个芯片中。因微控制单元控制驱动器至少需要六个控制线,故微控制单元至少需要额外增加六个互连管脚与模拟前端进行连接。可见,互连管脚的增加增大了合封的难度,提高了合封的成本。
技术实现思路
1、本技术提供一种无刷直流电机控制方法,可以减小合封的难度,降低合封的成本。
2、第一方面,本技术提供一种无刷直流电机控制方法,该方法应用于模拟前端,模拟前端与微控制单元连接,模拟前端包括驱动器;该方法包括:
3、接收微控制单元发送的脉宽调制信号和控制信号,脉宽调制信号用于控制无刷直流电机中的其中两相电枢绕组导通,控制信号用于控制无刷直流电机中的其中两相电枢绕组使能,控制信号的路数与脉宽调制信号的路数之和为四路或五路;
4、根据脉宽调制信号和控制信号,控制无刷直流电机工作。
5、上述方法,模拟前端可借助脉宽调制信号控制无刷直流电机中的其中两相电枢绕组导通,以及借助控制信号控制无刷直流电机中的其中两相电枢绕组使能,从而控制无刷直流电机工作,为控制无刷直流电机是否工作做好控制准备。
6、其中,控制信号的路数与脉宽调制信号的路数之和为四路或五路,则微控制单元需要额外增加四个或者五个互连管脚与模拟前端进行连接,进而减少互连管脚的数量,减小合封难度,降低合封成本。
7、基于此,模拟前端在减少互连管脚数量的情况下,根据脉宽调制信号和控制信号,仍能够保障无刷直流电机正常工作,达到减小合封难度和降低合封成本的效果。
8、在一种可能的设计中,控制信号的路数与脉宽调制信号的路数包括如下任一方式:
9、控制信号的路数为三路,脉宽调制信号的路数为一路;
10、或者,控制信号的路数为三路,脉宽调制信号的路数为两路;
11、或者,控制信号的路数为四路,脉宽调制信号的路数为一路。
12、上述方法中,能够用多种实施方案减少互连管脚数量,可灵活选择。
13、在一种可能的设计中,根据脉宽调制信号和控制信号,控制无刷直流电机工作,包括:
14、根据脉宽调制信号和控制信号,确定驱动信号,驱动信号用于控制无刷直流电机工作,驱动信号的路数为六路。
15、上述方法,结合脉宽调制信号和控制信号,可以确定驱动信号,从而使模拟前端能够基于驱动信号控制无刷直流电机工作。
16、在一种可能的设计中,控制信号包括第一路控制信号、第二路控制信号和第三路控制信号,驱动信号包括第一路驱动信号、第二路驱动信号、第三路驱动信号、第四路驱动信号、第五路驱动信号和第六路驱动信号;
17、在第一路控制信号、第二路控制信号和第三路控制信号用于控制无刷直流电机中的第一相电枢绕组和第二相电枢绕组使能的情况下,第一路驱动信号和第四路驱动信号为脉宽调制信号,第二路驱动信号和第三路驱动信号为脉宽调制信号的取反信号,第五路驱动信号和第六路驱动信号悬空,以使第一相电枢绕组和第二相电枢绕组处于导通状态。
18、上述方法,模拟前端能够借助驱动信号将电枢绕组中的两相电枢绕组导通。
19、在一种可能的设计中,控制信号包括第一路控制信号、第二路控制信号和第三路控制信号,所述驱动信号包括第一路驱动信号、第二路驱动信号、第三路驱动信号、第四路驱动信号、第五路驱动信号和第六路驱动信号;
20、在第一路控制信号、第二路控制信号和第三路控制信号用于控制无刷直流电机中的第一相电枢绕组和第三相电枢绕组使能的情况下,第一路驱动信号和第六路驱动信号为脉宽调制信号,第二路驱动信号和第五路驱动信号为脉宽调制信号的取反信号,第三路驱动信号和第四路驱动信号悬空,以使第一相电枢绕组和第三相电枢绕组处于导通状态。
21、上述方法,模拟前端能够借助驱动信号将电枢绕组中的两相电枢绕组导通。
22、在一种可能的设计中,控制信号包括第一路控制信号、第二路控制信号和第三路控制信号,驱动信号包括第一路驱动信号、第二路驱动信号、第三路驱动信号、第四路驱动信号、第五路驱动信号和第六路驱动信号;
23、在第一路控制信号、第二路控制信号和第三路控制信号用于控制无刷直流电机中的第二相电枢绕组和第三相电枢绕组使能的情况下,第三路驱动信号和第六路驱动信号为脉宽调制信号,第四路驱动信号和第五路驱动信号为脉宽调制信号的取反信号,第一路驱动信号和第二路驱动信号悬空,以使第二相电枢绕组和第三相电枢绕组处于导通状态。
24、上述方法,模拟前端能够借助驱动信号将电枢绕组中的两相电枢绕组导通。
25、在一种可能的设计中,控制信号包括第一路控制信号、第二路控制信号和第三路控制信号,驱动信号包括第一路驱动信号、第二路驱动信号、第三路驱动信号、第四路驱动信号、第五路驱动信号和第六路驱动信号;
26、在第一路控制信号、第二路控制信号和第三路控制信号用于控制无刷直流电机中的第一相电枢绕组和第二相电枢绕组使能的情况下,第二路驱动信号和第三路驱动信号为脉宽调制信号,第一路驱动信号和第四路驱动信号为脉宽调制信号的取反信号,第五路驱动信号和第六路驱动信号悬空,以使第一相电枢绕组和第二相电枢绕组处于导通状态。
27、上述方法,模拟前端能够借助驱动信号将电枢绕组中的两相电枢绕组导通。
28、在一种可能的设计中,控制信号包括第一路控制信号、第二路控制信号和第三路控制信号,驱动信号包括第一路驱动信号、第二路驱动信号、第三路驱动信号、第四路驱动信号、第五路驱动信号和第六路驱动信号;
29、在第一路控制信号、第二路控制信号和第三路控制信号用于控制无刷直流电机中的第一相电枢绕组和第三相电枢绕组使能的情况下,第二路驱动信号和第五路驱动信号为脉宽调制信号,第一路驱动信号和第六路驱动信号为脉宽调制信号的取反信号,第三路驱动信号和第四路驱动信号悬空,以使第一相电枢绕组和第三相电枢绕组处于导通状态。
30、上述方法,模拟前端能够借助驱动信号将电枢绕组中的两相电枢绕组导通。
31、在一种可能的设计中,控制信号包括第一路控制信号、第二路控制信号和第三路控制信号,驱动信号包括第一路驱动信号、第二路驱动信号、第三路驱动信号、第四路驱动信号、第五路驱动信号和第六路驱动信号;
32、在第一路控制信号、第二路控制信号和第三路控制信号用于控制无刷直流电机中的第二相电枢绕组和第三相电枢绕组使能的情况下,第四路驱动信号和第五路驱动信号为脉宽调制信号,第三路驱动信号和第六路驱动信号为脉宽调制信号的取反信号,第一路驱动信号和第二路驱动信号悬空,以使无刷直流电机中的第二相电枢绕组和第三相电枢绕组处于导通状态。
33、上述方法,模拟前端能够借助驱动信号将电枢绕组中的两相电枢绕组导通。
34、第二方面,本技术提供一种无刷直流电机控制方法,该方法应用于微控制单元,微控制单元与模拟前端连接,模拟前端包括驱动器;该方法包括:
35、生成脉宽调制信号和控制信号,脉宽调制信号用于控制无刷直流电机中的其中两相电枢绕组导通,控制信号用于控制无刷直流电机中的其中两相电枢绕组使能,控制信号的路数与脉宽调制信号的路数之和为四路或五路;
36、向模拟前端发送脉宽调制信号和控制信号,以使模拟前端根据脉宽调制信号和控制信号,控制无刷直流电机工作。
37、上述第二方面所提供的方法,其有益效果可以参见上述第一方面和第一方面的各可能的实施方式所带来的有益效果,在此不再赘述。
38、第三方面,本技术提供一种电子设备,一个或多个处理器;存储器;以及一个或多个计算机程序,其中一个或多个计算机程序存储在存储器上,当计算机程序被一个或多个处理器执行时,使得电子设备执行时实现第一方面、第一方面任一种可能及第二方面的设计中的无刷直流电机控制方法。
39、第四方面,本技术提供一种芯片,包括:接口电路和逻辑电路,接口电路用于接收来自于芯片之外的其他芯片的信号并传输至逻辑电路,或者将来自逻辑电路的信号发送给芯片之外的其他芯片,逻辑电路用于实现时实现第一方面及第一方面任一种可能的设计中的无刷直流电机控制方法。
40、第五方面,本技术提供一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器使得电子设备执行时实现第一方面、第一方面任一种可能及第二方面的设计中的无刷直流电机控制方法。
41、第六方面,本技术提供一种计算机程序产品,包括:执行指令,执行指令存储在可读存储介质中,电子设备的至少一个处理器可以从可读存储介质读取执行指令,至少一个处理器执行执行指令使得电子设备实现第一方面、第一方面任一种可能及第二方面的设计中的无刷直流电机控制方法。
- 还没有人留言评论。精彩留言会获得点赞!