机器人电源的拓扑结构及机器人的制作方法
本公开涉及机器人,尤其涉及一种机器人电源的拓扑结构及机器人。
背景技术:
1、一般电动系统都涉及到供电部分。机器人系统的电源系统可分为控制电源部分和运动机构的动力电源部分,常见的机器人电源拓扑结构如图1所示,两个整流器并联且均与输入电网连接,输入电网经两个整流器作用输出的电压分别作为动力电源和控制电源的供电电压。该机器人电源拓扑结构存在以下问题:当机器人运动过程中,有加速/减速过程,加速时运动机构将电能转换为机械能(动能或势能),减速时将机械能回馈为电能,此时馈能向动力电源网络充电,由于动力电源单向传输,馈能会将动力电网的电压升高。馈能导致电网电压抬高,会引起相关拓扑网络上电子元件过压风险,因而,需要增加馈能泄放装置,在电压过高时将多余电能泄放。
2、以一个单相动力电源网络为例,图2为常用的电能泄放的电路图,p端口与b端口之间的制动电阻就是在p端口与n端口电压过高时,泄放电能的通道。该电路设计,机器人电源能效低。
技术实现思路
1、本公开要解决的技术问题是为了克服机器人电源能效低的缺陷,提供一种机器人电源的拓扑结构及机器人。
2、本公开是通过下述技术方案来解决上述技术问题:
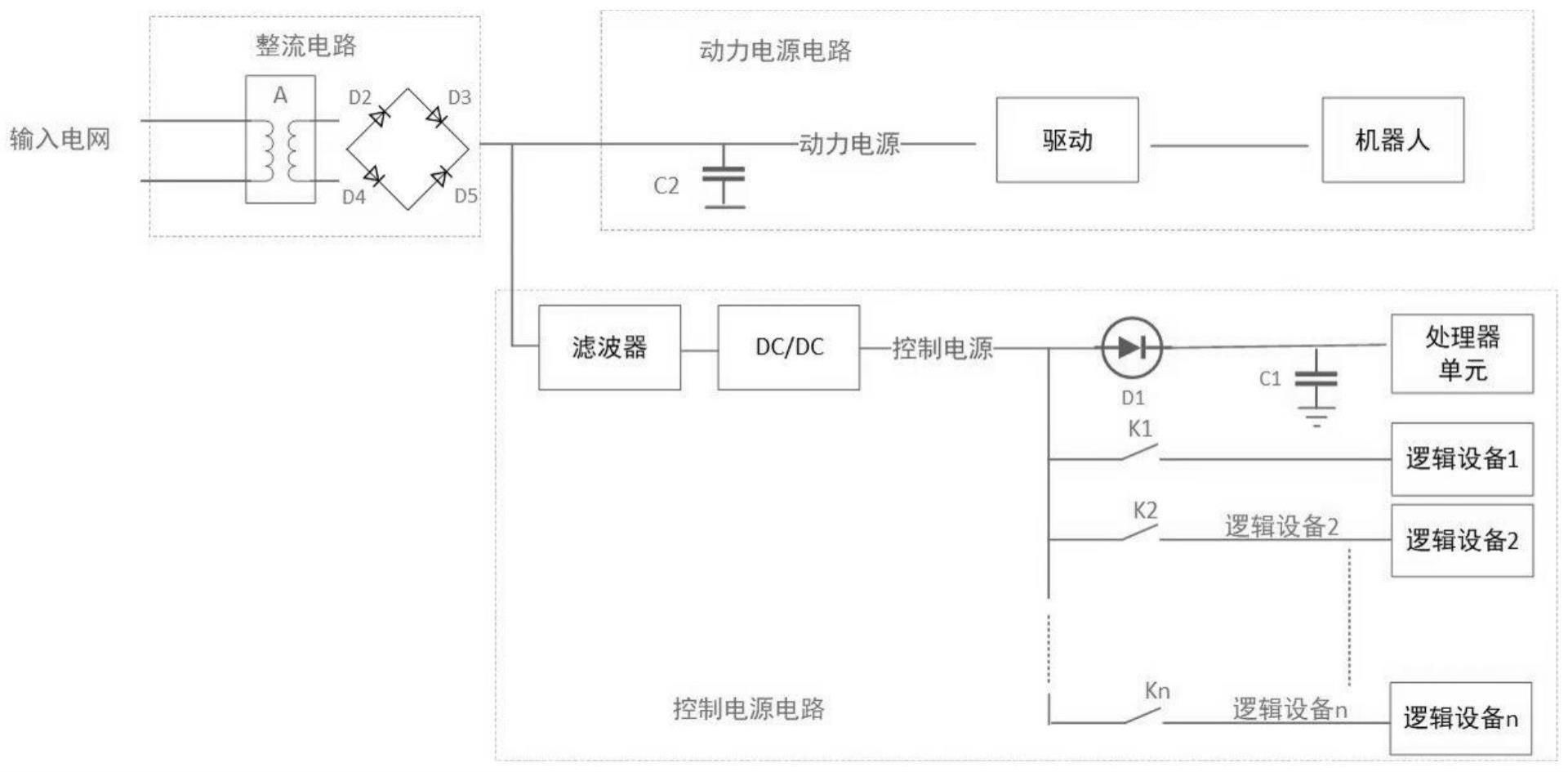
3、本公开提供一种机器人电源的拓扑结构,所述拓扑结构包括:整流电路、动力电源电路和控制电源电路;
4、所述动力电源电路的输入端和所述控制电源的输入端均与所述整流电路的输出端电连接;
5、所述动力电源电路用于为机器人的动力系统供电;
6、所述控制电源电路用于为机器人的控制系统供电。
7、较佳地,所述控制电源电路包括:直流-直流转换器和控制单元;
8、所述直流-直流转换器的输入端与所述整流电路的输出端电连接,所述直流-直流转换器的输出端与所述控制单元的输入端电连接。
9、较佳地,所述控制电源电路还包括:滤波器;
10、所述滤波器的输入端与所述整流电路的输出端电连接,所述滤波器的输出端与所述直流-直流转换器的输入端电连接。
11、较佳地,所述控制单元包括:处理器单元、逻辑设备、第一二极管和第一储能元件;
12、所述第一二极管的阴极与所述处理单元的输入端电连接,所述第一二极管的阳极与所述直流-直流转换器的输出端电连接;
13、所述第一储能元件与所述处理器单元并联;
14、所述逻辑设备的输入端与所述直流-直流转换器的输出端电连接。
15、较佳地,所述第一储能元件包括第一电容或电池。
16、较佳地,所述控制单元还包括:开关;
17、所述开关的一端与所述直流-直流转换器的输出端电连接,所述开关的另一端与所述逻辑设备的输入端电连接。
18、较佳地,所述动力电源电路还包括第二储能元件和驱动单元;
19、所述第二储能元件与所述驱动单元并联。
20、较佳地,所述第二储能元件包括第二电容。
21、较佳地,所述整流电路包括电压转换器和整流管;
22、所述电压转换器的输出端和所述整流管的输入电连接;
23、所述整流管的输出和所述动力电源电路的输入端及所述控制电源电路的输入端电连接。
24、本公开还提供一种机器人,包括如前述的机器人电源的拓扑结构。
25、本公开的积极进步效果在于:
26、本公开通过在机器人电源的拓扑结构中设置整流电路、动力电源电路和控制电源电路,且整流电路的输出作为动力电源电路的输入端和控制电源电路的输入端的公共端,从而使得在机器人运动减速阶段产生的电能能传输到控制电源电路,而不是用泄放电路烧掉,进而提高了机器人电源能效,有利于机器人电源散热设计;并且在关电时,可作为控制系统数据备份的电能,简化了系统电源设计,有利于成本控制。
技术特征:
1.一种机器人电源的拓扑结构,其特征在于,所述拓扑结构包括:整流电路、动力电源电路和控制电源电路;
2.如权利要求1所述的机器人电源的拓扑结构,其特征在于,所述控制电源电路包括:直流-直流转换器和控制单元;
3.如权利要求2所述的机器人电源的拓扑结构,其特征在于,所述控制电源电路还包括:滤波器;
4.如权利要求2所述的机器人电源的拓扑结构,其特征在于,所述控制单元包括:处理器单元、逻辑设备、第一二极管和第一储能元件;
5.如权利要求4所述的机器人电源的拓扑结构,其特征在于,所述第一储能元件包括第一电容或电池。
6.如权利要求4所述的机器人电源的拓扑结构,其特征在于,所述控制单元还包括:开关;
7.如权利要求1所述的机器人电源的拓扑结构,其特征在于,所述动力电源电路还包括第二储能元件和驱动单元;
8.如权利要求7所述的机器人电源的拓扑结构,其特征在于,所述第二储能元件包括第二电容。
9.如权利要求1所述的机器人电源的拓扑结构,其特征在于,所述整流电路包括电压转换器和整流管;
10.一种机器人,其特征在于,包括如权利要求1~9中任意一项所述的机器人电源的拓扑结构。
技术总结
本公开公开了一种机器人电源的拓扑结构及机器人,所述拓扑结构包括:整流电路、动力电源电路和控制电源电路;所述动力电源电路的输入端和所述控制电源的输入端均与所述整流电路的输出端电连接;所述动力电源电路用于为机器人的动力系统供电;所述控制电源电路用于机器人的控制系统供电,本公开使得在机器人运动过程中动力电源电路产生的电能能够传输至控制电源电路中,改善运行时机器人电源能效,有利于机器人的散热设计;同时为断电时系统数据备份提供了电能,简化了系统电源设计和成本控制。
技术研发人员:王亚飞,汤阳
受保护的技术使用者:上海奔曜科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!