基于燃料电池的微电网的分布式协同功率控制方法
本发明属于燃料电池新能源,具体涉及一种适用于基于燃料电池的微电网的分布式协同功率控制方法。
背景技术:
1、推广与应用可再生能源与高效率低污染的固体氧化物燃料电池(sofc)相结合的微电网系统,是推动“碳中和,碳达峰”,限制全球变暖的有效途径。为降低微电网运行成本与排放并提高效率与寿命等方面性能,需采用能量管理策略确定微电网各设备的最佳功率参考点,再进行功率跟踪控制。然而,在光伏、风机等可再生能源发电的间歇性和随机性以及负载需求功率的不确定性影响下,微电网中各设备的最佳功率参考点将不断变化。由于燃料传输延迟、热安全约束和退化等因素,过快的功率跟踪将导致sofc燃料利用率、温度梯度等超出安全约束,造成电堆不可逆的损害。sofc难以进行快速地、精确地跟踪不断变化的参考功率,将导致微电网流出与流出功率不等。流入功率大于流出功率,将使微电网电压上升,反之下降,进而导致微电网总线电压不稳定。
2、现有考虑可再生能源和负载功率影响的此类微电网控制方法中,一部分仅根据单个设备的特性和数据设计分散式的功率跟踪控制器,难以快速消除sofc等设备功率跟踪延迟对整个微电网电压稳定性的影响;另一部分为整个微电网设计集中式控制器,难以扩展新设备且受限于集中计算能力、通信带宽。因此,为实现此类微电网的稳定控制,开发能够跟踪能量管理策略提供的最佳参考功率且消除可再生能源、负载功率波动造成的sofc等设备功率跟踪误差的分布式协同控制方法尤为重要。
技术实现思路
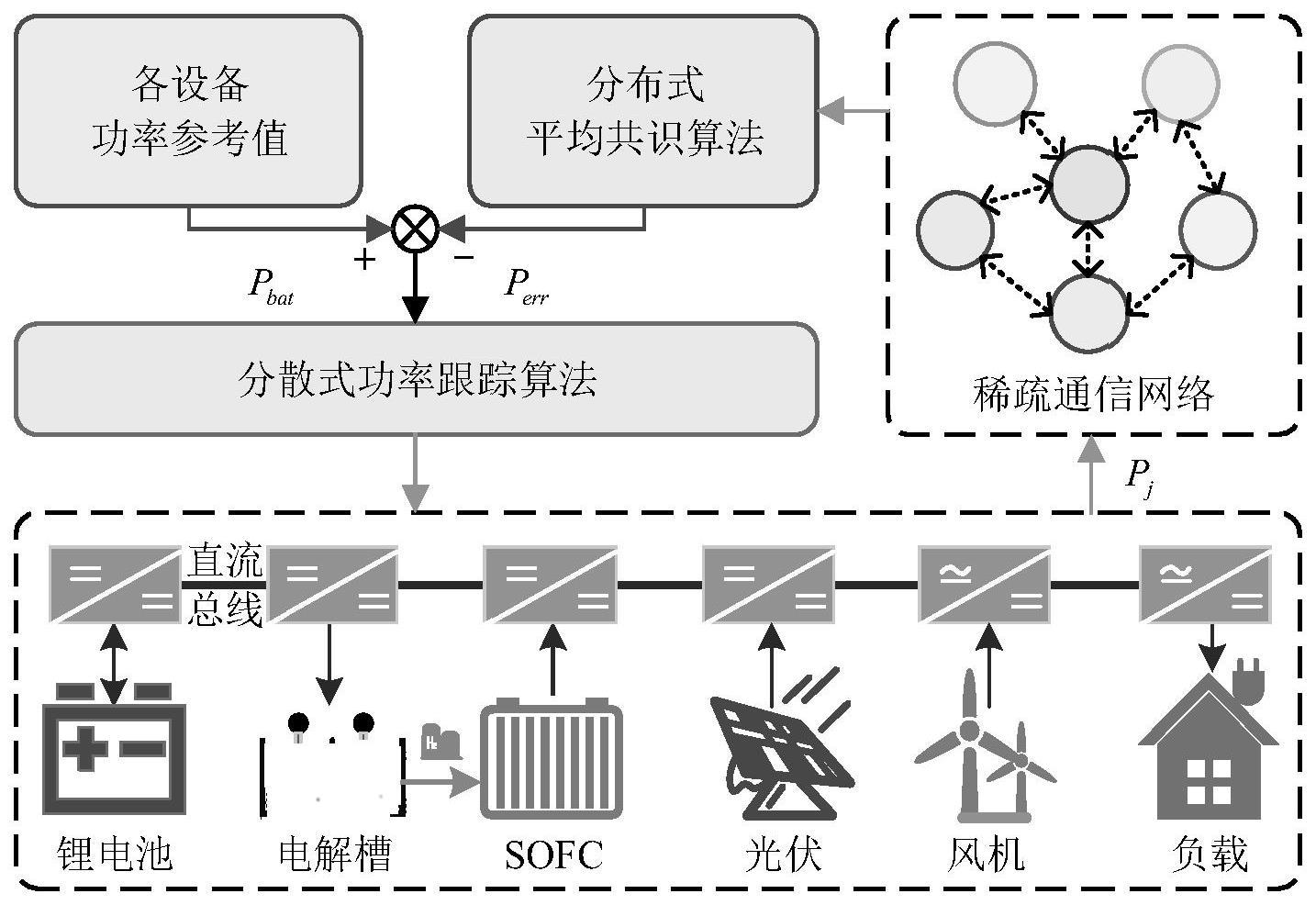
1、本发明的目的在于:为了克服现有技术的不足,提供了一种适用于基于固体氧化物燃料电池(sofc)微电网的分布式协同功率跟踪控制方法,其首先为光伏电池、风机、sofc、电解槽以及锂电池分别设计功率跟踪控制器;然后,在分散式控制的基础上,通过分布式共识算法计算微电网功率平衡误差,再调度微电网中锂电池的功率补偿因sofc功率跟踪延迟造成的微电网的功率失衡,以保障直流母线电压稳定。
2、为实现上述发明目的,本发明的适用于基于固体氧化物燃料电池微电网的分布式协同功率跟踪控制方法,包括以下步骤:
3、步骤1:建立考虑退化的固体氧化物燃料电池sofc系统模型,并基于该固体氧化物燃料电池系统模型建立对应的微电网;
4、步骤2:采用能量管理策略为sofc、电解槽和锂电池分配输入和输出功率,pj,ref,j={fc,el,bat};
5、步骤3:为微电网中光伏、风机、锂电池、燃料电池和电解槽分别建立功率跟踪控制器,实现分散式功率跟踪,得到分散式(分布式)功率跟踪策略,其中光伏、风机采用最大功率跟踪控制器,燃料电池采用模型预测控制器,锂电池、电解槽采用pi(比例积分)控制器;
6、步骤4:在步骤3所建立的分散式功率跟踪策略的基础上,基于稀疏通信网络,利用分布式共识算法实时计算微电网功率平衡误差并修正锂电池功率以补偿功率平衡误差,实现分布式协同功率跟踪控制。
7、进一步的,步骤1中,将燃料电池(即sofc)的电压v的退化率采用下式所示与电流、温度和燃料利用率的函数进行描述:
8、
9、其中,vd(t)表示燃料电池在t时刻的电压退化率(即电池堆电压退化率),uf表示燃料利用率,t表示气体温度,i表示燃料电池电流,a1、a2、a3、a4和a5为预置的5个常数,采用实时数据进行辨识确定。
10、进一步的,步骤3中,分散式功率跟踪控制的具体内容为:
11、(1)光伏最大功率跟踪控制
12、采用电导增量法对光伏进行控制,其根据最大功率处满足dppv/dvpv=0条件,对最大功率点跟踪控制,具体为:
13、
14、其中,ipv、vpv和gpv分别为光伏电池电流、电压和电导,ppv表示光伏电池功率。当电导的偏导dgpv=-gpv时,处于最大功率点;当dgpv>-gpv时,处于最大功率点左侧,需增加电压;当dgpv<-gpv时,处于最大功率点右侧,需降低电压;即给光伏分配更多的功率以增大电压,具体的增加方式可基于实际场景选取,当增加到dgpv=-gpv时停止。
15、其中,增压或降压的具体实现手段如下:
16、最大功率点的参考电压具体为:
17、
18、其中,vpv,ref,k+1表示下一时刻光伏电池最大功率参考电压,ipv,k、vpv,k和gk分为k步迭代的光伏电池最大功率参考电流、电压和电导,γk为步长,定义为:
19、
20、式中,th为阈值,其与采样间隔有关。
21、得到光伏最大功率点的参考电压后,采用pi控制器调节dc/dc(直流转直流开关电源)占空比dpv实现最大功率跟踪。
22、
23、其中,kp、ki分别为比例系数和积分系数。
24、(2)风机最大功率跟踪控制
25、对于给定的风机,在恒定的俯仰角下,无论风速如何,叶片最优尖端速度λopt保持恒定值。在风速v下能够捕获最大风力功率的最优转速ωopt为:
26、
27、其中,r为叶片半径。
28、当机械转速ωm跟踪其最优转速ωopt即可提取最大的风能。由风机最大功率处满足dpwt/dωm=0条件,可得:
29、
30、式中,ωm为转子转速,pwt为风机功率,vwt为二极管电桥整流器的输出电压,其正比于相电压vph,由永磁同步电机特性可知dvph/dωe>0,则dvwt/dωe>0;dwt为dc/dc转换器占空比,由boost升压dc/dc输入输出关系可知ddwt/dvwt=-vout<0,其中,vout表示boost升压电路输出电压;ωe为相电压转速,由永磁同步电机特性可知dωe/dωm=p>0,p为电机极对数。综上可知:
31、
32、当dpwt/ddwt=0时,处于最大功率点;dpwt/ddwt<0时,处于最大功率点左侧,需降低占空比;dpwt/ddwt>0时,处于最大功率点右侧,需增加占空比。
33、通过pi控制器根据转速误差调节dc/dc占空比dwt实现最大功率跟踪。
34、
35、
36、其中,iwt,ref、iwt分别为风机最大功率处参考电流和当前风机电流;kp1、kp2和ki1、ki2分别为比例系数和积分系数;
37、(3)燃料电池系统控制
38、本发明采用模型预测控制器进行sofc系统的功率跟踪控制,其通过最小化下式所示的目标函数得到最优控制增量序列,使系统输出功率逼近参考功率。
39、
40、s.t.tb≤1273k
41、
42、0.6≤uf≤0.9
43、其中,j(u)表示sofc控制量的目标函数,p、m分别为预测时域步长和控制时域步长,q、r分别为与控制误差和输入增量相乘的系数矩阵;u=[i,uf,λo2,bp1,bp2]t为控制量,i为电流密度,uf为燃料利用率,λo2为空气过氧比,bp1和bp2分别为燃料和空气旁通阀的开度;δu为控制输入增量,tb为燃烧室温度,为sofc电池堆内温度,为k时刻对k+j时刻的sofc发电功率的预测值,yr为参考功率(即基于k时刻预测k+j时刻),为了防止燃料不足,定义为:
44、yr(k+j|k)=αy(k+j|k)+(1-α)pfc(k+j|k)
45、其中,pfc(k+j|k)为k+j时刻由能量管理策略分配的sofc输出功率,j={0,2,…,p-1},p为向前预测步长,α为平滑因子,y(k+j|k)为k+j时刻的输出功率;
46、为k+j时刻校正后的预测功率值:
47、
48、其中,h为0到1的常数,为k时刻对k+j时刻的sofc发电功率的预测值:
49、
50、
51、其中,f(·)为预置的sofc数学模型中关于状态变量、控制输入和时变参数对象的模型,为状态变量,其中,xh2、xo2和分别为sofc电池堆内氢气摩尔分数、氧气摩尔分数和温度,和分别为燃料换热器中燃料温度和废气温度,和分别为空气换热器中空气和废气温度,为燃料混合阀中燃料温度,为空气混合阀中空气温度,tb为燃烧室温度;u=[i,uf,λo2,bp1,bp2]t为控制输入;y为系统输出功率;δt为离散时间步长;θ=vd为时变参数,vd为电池堆电压退化率;uk+j|k表示k时刻对k+j时刻的控制输入;xk+j-1|k表示k时刻对k+j时刻的状态变量,表示k时刻对k+j时刻的状态变量预测值,θk+j|k表示k时刻对k+j时刻的时变参数。模型f(·)的具体形式可参考文献《wu x,gao d.optimal robust control strategy of a solid oxide fuelcell system[j].j.power sources,2018,374:225-236.》。
52、求解控制量后,仅将最优控制策略集的第一个控制动作(将同一时刻的所有控制量(功率)作为一个控制动作,最优控制策略集中的各个控制动作则是按照时间升序排列)作用于sofc系统。采用pi控制器控制boost升压dc/dc电路的开关管占空比dfc完成sofc输出功率控制:
53、
54、其中,ifc,ref、ifc分别为sofc参考电流和当前sofc电流;
55、(4)电解槽控制策略
56、本发明采用buck(降压式变换电路)降压dc/dc电路对电解槽输入功率进行控制。首先采样电压、电流并通过低通滤波器滤波,再根据实时功率与参考功率的差,最后采用pi控制器调节buck降压dc/dc电路占空比del对电解槽输入功率进行控制:
57、
58、其中,pel为电解槽当前输出功率,pel,ref为电解槽的参考功率。
59、(5)锂电池控制策略
60、本发明采用双向buck-boost dc/dc电路对锂电池输入/输出功率进行控制。
61、
62、其中,为下垂控制补偿后的锂电池参考功率;vdc为直流母线电压;vref,dc为直流母线参考电压;k为下垂系数。
63、进一步的,步骤4中,分布式协同控制策略具体为:
64、在分散式功率控制的基础上,通过稀疏的通信网络,利用平均共识算法计算功率平衡误差perr,再由锂电池进行补偿,以维持直流母线电压的稳定:
65、1)perr>0时,表现为供过于需,由锂电池充电吸收;
66、2)perr<0时,表现为供给不足,由锂电池放电补偿。
67、
68、其中,为分布式补偿后的锂电池参考功率,功率平衡误差perr具体为:
69、perr=σjpj,j={pv,wt,fc,bat,el,load}
70、采用集中式计算功率平衡误差需与每个设备通信且不易扩展,本发明基于稀疏的通信网络,利用分布式离散平均共识算法计算功率平衡误差:
71、
72、xi(k+1)=xi(k)+ε·∑jaij[xj(k)-xi(k)]
73、其中,xi(k)表示设备i在k时刻的分散式功率跟踪策略,其表达式为xi(k)=[ppv,pwt,pfc,pbat,pel,pload]t,m表示分布式节点数,ε为收敛系数,aij表示设备i和设备j之间的连接状态,若存在通信连接,则aij=1,否则aij=0。xi(k+1)为下一时刻的分散式功率跟踪策略,其基于设备之间的连接状态和上一时刻的分散式功率跟踪策略确定。
74、为便于求取收敛系数,将上式改写为如下矩阵形式:
75、x(k+1)=wx(k)
76、w=i-ε·l
77、其中,i为m阶单位矩阵,l为微电网的通信拓扑图的拉普拉斯矩阵,其等于通信拓扑图的度矩阵减去邻接矩阵;收敛系数ε:
78、
79、其中,λj为拉普拉斯矩阵l的第j大特征值。
80、最终,通过pi控制器输出双向buck-boost dc/dc电路占空比dbat对锂电池功率进行控制:
81、
82、综上所述,由于采用了上述技术方案,本发明的有益效果是:
83、(1)本发明的分布式协同功率跟踪控制方法,根据微电网的功率平衡误差,调度锂电池进行功率补偿,能够有效的解决包括但不限于sofc功率跟踪延迟造成的微电网功率不平衡与母线电压波动。
84、(2)本发明由于采用基于稀疏通信网络的分布式平均共识算法进行功率平衡误差计算,能够有效的克服集中式控制方法的难扩展、单点故障等问题,以及分散式控制方法的直流母线电压偏差等问题。
- 还没有人留言评论。精彩留言会获得点赞!