一种适应100V碳化硅电机驱动控制的无感控制算法的制作方法
本发明涉及电机驱动控制,具体为一种适应100v碳化硅电机驱动控制的无感控制算法。
背景技术:
1、由于电力电子技术和集成控制技术高速发展,目前的电机以无刷直流电机为主,无刷电机的控制技术分为有感控制和无感控制,有感控制通过电机内的传感器感应转子的状态与位置进行控制,无感控制通过电机驱动器内的反电动势判断转子位置进行换向。电机驱动器根据转子位置的判断方式设计控制方法。
2、目前新能源汽车和飞机的发展,对电机驱动器的散热和电压提出了更高的要求,而硅器件的特性限制了驱动器的驱动电压和散热性能。有感控制的无刷直流电机具有位置传感器,对电机内部散热提出更高的指标,降低设备的可靠性。而无感控制中电机驱动器的采样具有信号易受干扰的问题,转子位置的辨识成为控制中的难点,因此,亟待一种改进的技术来解决现有技术中所存在的这一问题。
技术实现思路
1、本发明的目的在于提供一种能够让电机运行在高压、高频范围内,通过调整合适的参数,快速的从开环控制阶段进入稳定换向阶段,实现电机的快速平稳启动,且开环及换向阶段电流值小且平稳,运行效率高,调速性能优越,换向过程稳定的碳化硅电机驱动控制的无感控制算法,以解决上述背景技术中提出的问题。
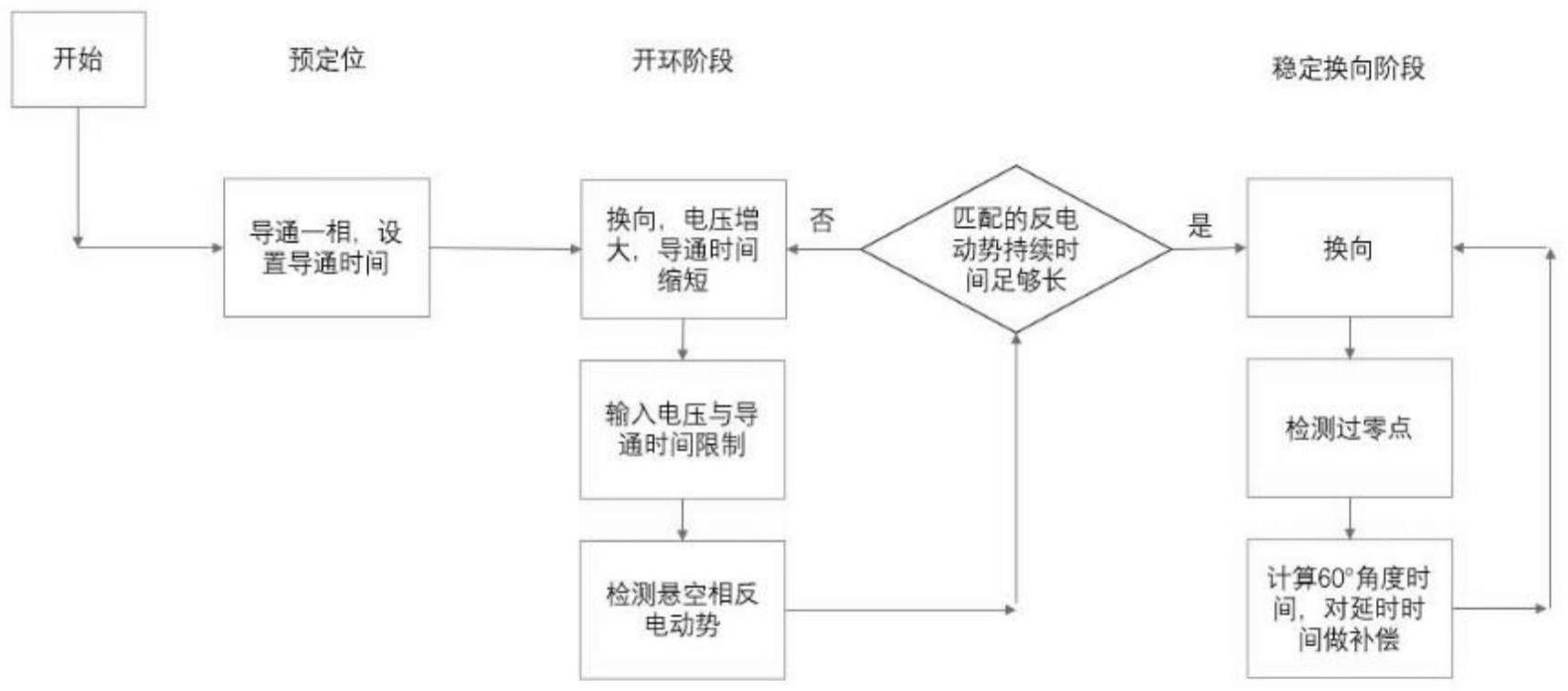
2、为实现上述目的,本发明提供如下技术方案:一种适应100v碳化硅电机驱动控制的无感控制算法,包括预定位阶段、开环控制阶段、稳定换向阶段,所述
3、给定导通时间,将转子转到固定位置;
4、定义初始的电机驱动器的输出电压及换向间隔时间的长度;
5、稳定换向阶段按照指定的顺序进行换向,换向前会一直检测悬空相反电动势过零点,检测到过零点后延时30°电角度时间进行换向。
6、优选的,所述定义初始的电机驱动器的输出电压及换向间隔时间的长度
7、当电机驱动器在电机起步阶段的输出电压过高,电机在当前阶段的反向电动势很小,逐步增大电驱的输出电压,增大电流提高电机转矩;
8、开环控制阶段,每次换向后控制电驱的输出电压增大,换向的间隔时间逐步减少,降低启动中的响应波动;
9、在电驱电压输出值增大过程中采用斜率递减的方式将电机快速平稳启动;
10、电机在旋转过程中,反电动势的电压值体现在悬空相的相电压上,通过悬空相的相电压对电机转子的位置进行判别,在开环控制阶段对悬空相的相电压进行采样;
11、当采样值的符号与理论悬空相反电动势过零后的符号相同且能够多次采样悬空相的反电动势后,进入稳定换向阶段。
12、优选的,所述按照指定的顺序进行换向,换向前一直检测悬空相反电动势过零点,检测到过零点后延时30°电角度时间进行换向,电驱输出电压采用pwm方式进行控制。
13、优选的,所述采用两种采样模式进行采样,当pwm为低占空比时,在pwm上升沿处采样悬空相反电动势;当pwm为高占空比时,在pwm下降沿处采样悬空相反电动势
14、优选的,所述稳定换向阶段采用两种采样模式进行采样,
15、当pwm为低占空比时,在pwm上升沿处采样悬空相反电动势;
16、当pwm为高占空比时,在pwm下降沿处采样悬空相反电动势;
17、将换向后检测到悬空相反电动势过零点时间的2倍作为预计本向持续时间;
18、统计每向持续时间,并计算前六次每向持续时间的平均值,将计算的平均值与预计本向的持续时间做差,乘以比例系数a,补偿到延时时间上。
19、优选的,一种适应100v碳化硅电机驱动控制的无感控制算法包括以下步骤:
20、首先预定位阶段,启动电机首先导通三相电路ab相,设置初始导通时间以及电驱初始输出电压,将每向导通时间设置为最低到时间,电驱输出电压最高设为10v,设置反电动势采样次数阈值,设置pwm采样转换占空比阈值,选择补偿系数;
21、依照ab->ac->bc->ba->ca->cb->ab的顺序将三相电路导通,每次换向后下一向导通时间为本向导通时间减去本向导通时间除45,开环控制阶段采样悬空相反电动势,如果采样值符号与理论悬空相反电动势过零后的符号相同,且采样次数达到32次,切换至稳定换向阶段;
22、当定时器输出pwm的占空比小于25%则在pwm上升沿时刻采样悬空相反电动势,当定时器输出pwm的占空比大于25%则在pwm下降沿时刻采样悬空相反电动势,当检测到悬空相反电动势过零点后,统计每向的持续时间,对前六次每向的持续时间进行平均;
23、得到平均每向持续时间t,计算换向后检测到的悬空相反电动势过零点的时间,预计本向持续时间为,将平均每向持续时间与预计本向持续时间做差并与相乘,补偿到延时时间,延时30°电角度时间,在30°电角度时间延时后,如果系统接收到停机指令,则关闭电驱输出,如果系统没有接到停机指令,则进行换向,让电机继续转动。
24、与现有技术相比,本发明的有益效果是:
25、(1)随着电机的起步,反向电动势会逐渐增大,施加在电机内阻上的电压为电驱的输出电压减去反向电动势的电压,为了保证电机的启动,要逐步增大电驱的输出电压,增大电流提高电机转矩,进而提高电机的转速;
26、(2)为了提高电机的动态响应时间,降低启动中的响应波动,在电驱电压输出值增大过程中采用斜率递减的方式实现电机的快速平稳启动;
27、(3)本发明能够让电机运行在高压、高频范围内,通过调整合适的参数,快速的从开环控制阶段进入稳定换向阶段,实现电机的快速平稳启动,且开环及换向阶段电流值小且平稳,运行效率高,调速性能优越,换向过程稳定。
技术特征:
1.一种适应100v碳化硅电机驱动控制的无感控制算法,包括预定位阶段、开环控制阶段、稳定换向阶段,其特征在于:所述
2.根据权利要求1所述的一种适应100v碳化硅电机驱动控制的无感控制算法,其特征在于:所述定义初始的电机驱动器的输出电压及换向间隔时间的长度
3.根据权利要求1所述的一种适应100v碳化硅电机驱动控制的无感控制算法,其特征在于:所述按照指定的顺序进行换向,换向前一直检测悬空相反电动势过零点,检测到过零点后延时30°电角度时间进行换向,电驱输出电压采用pwm方式进行控制。
4.根据权利要求1所述的一种适应100v碳化硅电机驱动控制的无感控制算法,其特征在于:所述采用两种采样模式进行采样,当pwm为低占空比时,在pwm上升沿处采样悬空相反电动势;当pwm为高占空比时,在pwm下降沿处采样悬空相反电动势。
5.根据权利要求1所述的一种适应100v碳化硅电机驱动控制的无感控制算法,其特征在于:所述稳定换向阶段采用两种采样模式进行采样,
6.实现权利要求1所述的一种适应100v碳化硅电机驱动控制的无感控制算法包括以下步骤:
技术总结
本发明公开了一种适应100V碳化硅电机驱动控制的无感控制算法,包括预定位阶段、开环控制阶段、稳定换向阶段,首先定义初始的电机驱动器的输出电压及换向间隔时间的长度,在开环控制阶段,每次换向后要控制电驱的输出电压增大,换向的间隔时间逐步减少,降低启动中的响应波动,提高电机的动态响应时间,采用斜率递减的方式实现电机的快速平稳启动,稳定换向阶段按照指定的顺序进行换向,检测到过零点后延时30°电角度时间进行换向,本发明能够让电机运行在高压、高频范围内,通过调整合适的参数,快速的从开环控制阶段进入稳定换向阶段,实现电机的快速平稳启动,且开环及换向阶段电流值小且平稳,运行效率高,调速性能优越,换向过程稳定。
技术研发人员:范丽,项军华,何云瀚,沈家欣,王腊斌
受保护的技术使用者:湖州天骥智航科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!