一种电机控制方法、系统、装置及计算机可读存储介质与流程
本发明涉及电机控制领域,特别是涉及一种电机控制方法、系统、装置及计算机可读存储介质。
背景技术:
1、在搬运装置或者机器人等设备中常使用变频器或伺服驱动器等电机驱动器驱动电机运行,从而使电机带动负载移动,但搬运装置等设备的机械移动会导致负载的转动惯量产生波动。相关技术对电机进行控制时常采用三环位置控制(由外至内依次为位置环、速度环和电流环)或者两环速度控制(由内至外为速度环和电流环),当负载的转动惯量产生波动时,三环位置控制中的速度环以及两环速度控制中的速度环均会受到干扰,进而对电机转子速度和电机转子位置的控制出现影响。
技术实现思路
1、本发明的目的是提供一种电机控制方法、系统、装置及计算机可读存储介质,减小速度环中使用的预设速度调节运算中的比例增益系数和积分增益系数在电机控制总传递函数中的占比,降低负载的转动惯量发生波动时对电机速度和电机位置的控制结果的影响程度。
2、为解决上述技术问题,本发明提供了一种电机控制方法,包括:
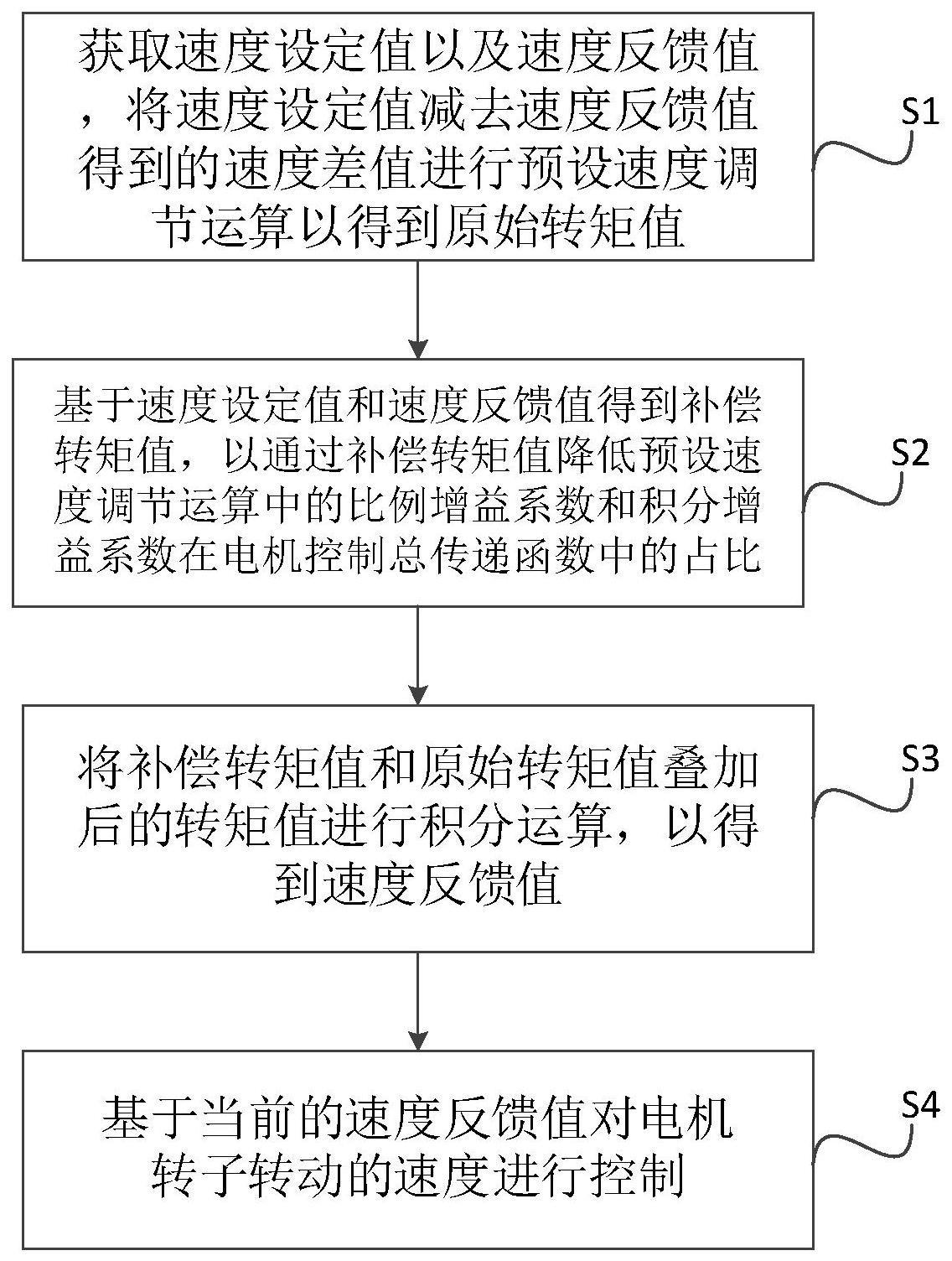
3、获取速度设定值以及速度反馈值,将所述速度设定值减去所述速度反馈值得到的速度差值进行预设速度调节运算以得到原始转矩值;
4、基于所述速度设定值和所述速度反馈值得到补偿转矩值,以通过补偿转矩值降低所述预设速度调节运算中的比例增益系数和积分增益系数在电机控制总传递函数中的占比;
5、将所述补偿转矩值和所述原始转矩值叠加后的转矩值进行积分运算,以得到所述速度反馈值;
6、基于当前的所述速度反馈值对电机转子转动的速度进行控制。
7、优选的,基于所述速度设定值和所述速度反馈值得到补偿转矩值,包括:
8、将所述速度设定值进行微分运算得到加速度设定值;
9、将所述速度反馈值进行微分运算得到加速度反馈值;
10、将所述加速度设定值减去所述加速度反馈值得到的加速度差值放大第一预设补偿增益系数后的值作为所述补偿转矩值,其中,所述第一预设补偿增益系数大于1。
11、优选的,基于所述速度设定值和所述速度反馈值得到补偿转矩值,包括:
12、将所述速度设定值进行高通滤波运算后的值作为速度设定补偿值;
13、将所述速度反馈值进行高通滤波运算后的值作为速度反馈补偿值;
14、将所述速度设定补偿值减去所述速度反馈补偿值得到的差值放大第二预设补偿增益系数后的值作为所述补偿转矩值,其中,所述第二预设补偿增益系数大于1。
15、优选的,将所述速度设定值进行高通滤波运算后的值作为速度设定补偿值,包括:
16、将所述速度设定值与预设高通滤波传递函数相乘后的值作为所述速度设定补偿值,其中,所述预设高通滤波传递函数为s*k/(s+k),s为复频率变量,k为所述预设高通滤波传递函数的增益值;
17、将所述速度反馈值进行高通滤波运算后的值作为速度反馈补偿值,包括:
18、将所述速度反馈值与所述预设高通滤波传递函数相乘后的值作为所述速度反馈补偿值。
19、优选的,将所述速度设定值减去所述速度反馈值得到的速度差值进行预设速度调节运算以得到原始转矩值,包括:
20、将所述速度差值与预设速度调节传递函数相乘后的值作为所述原始转矩值,所述预设速度调节传递函数为(kv*s+ki)/s,其中,s为复频率变量,kv为预设比例增益系数,ki为预设积分增益系数。
21、优选的,在采用三环位置控制算法对电机进行控制时,在获取速度设定值以及速度反馈值之前,还包括:
22、获取位置设定值以及位置反馈值,将所述位置设定值减去所述位置反馈值得到的位置差值进行预设位置调节运算以得到所述速度设定值;
23、将所述补偿转矩值和原始转矩值叠加后的转矩值进行积分运算之后,还包括:
24、获取将所述补偿转矩值和原始转矩值叠加后的转矩值进行积分运算后得到的所述速度反馈值,将所述速度反馈值进行积分运算得到所述位置反馈值;
25、基于所述位置反馈值对所述电机转子的位置进行控制。
26、优选的,将所述位置设定值减去所述位置反馈值得到的位置差值进行预设位置调节运算以得到所述速度设定值,包括:
27、将所述位置设定值减去所述位置反馈值的位置差值放大预设位置调节增益系数得到所述速度设定值。
28、为解决上述技术问题本发明还提供了一种电机控制系统,包括:
29、原始转矩值确定单元,用于获取速度设定值以及速度反馈值,将所述速度设定值减去所述速度反馈值得到的速度差值进行预设速度调节运算以得到原始转矩值;
30、补偿转矩值确定单元,用于基于所述速度设定值和所述速度反馈值得到补偿转矩值,以通过补偿转矩值降低所述预设速度调节运算中的比例增益系数和积分增益系数在电机控制总传递函数中的占比;
31、速度反馈单元,用于将所述补偿转矩值和所述原始转矩值叠加后的转矩值进行积分运算,以得到所述速度反馈值;
32、速度控制单元,用于基于当前的所述速度反馈值对电机转子转动的速度进行控制。
33、为解决上述技术问题本发明还提供了一种电机控制装置,包括:
34、存储器,用于存储计算机程序;
35、处理器,用于执行所述计算机程序时实现上述任一电机控制方法的步骤。
36、为解决上述技术问题本发明还提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现上述任一电机控制方法的步骤。
37、本发明的有益效果在于提供了一种电机控制方法、系统、装置及计算机可读存储介质,首先获取速度设定值和速度反馈值,将速度设定值减去速度反馈值得到的速度差值进行预设速度调节运算以得到原始转矩值。基于速度设定值和速度反馈值还得到补偿转矩值,将补偿转矩值叠加到原始转矩值上共同进行积分算法从而减小预设速度调节运算中的比例增益系数和积分增益系数在电机控制总传递函数中的占比。预设速度调节运算为速度环的一步,预设速度调节运算的比例增益系数和积分增益系数决定了速度环的响应带宽,通过减小比例增益系数和积分增益系数在电机控制总传递函数中的占比,降低负载的转动惯量发生波动时对电机速度和电机位置的控制结果的影响程度。
技术特征:
1.一种电机控制方法,其特征在于,包括:
2.如权利要求1所述的电机控制方法,其特征在于,基于所述速度设定值和所述速度反馈值得到补偿转矩值,包括:
3.如权利要求1所述的电机控制方法,其特征在于,基于所述速度设定值和所述速度反馈值得到补偿转矩值,包括:
4.如权利要求3所述的电机控制方法,其特征在于,将所述速度设定值进行高通滤波运算后的值作为速度设定补偿值,包括:
5.如权利要求1所述的电机控制方法,其特征在于,将所述速度设定值减去所述速度反馈值得到的速度差值进行预设速度调节运算以得到原始转矩值,包括:
6.如权利要求1至5任一项所述的电机控制方法,其特征在于,在采用三环位置控制算法对电机进行控制时,在获取速度设定值以及速度反馈值之前,还包括:
7.如权利要求6所述的电机控制方法,其特征在于,将所述位置设定值减去所述位置反馈值得到的位置差值进行预设位置调节运算以得到所述速度设定值,包括:
8.一种电机控制系统,其特征在于,包括:
9.一种电机控制装置,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述电机控制方法的步骤。
技术总结
本发明公开了一种电机控制方法、系统、装置及计算机可读存储介质,涉及电机控制领域,首先获取速度设定值和速度反馈值,将速度设定值减去速度反馈值得到的速度差值进行预设速度调节运算以得到原始转矩值。基于速度设定值和速度反馈值还得到补偿转矩值,将补偿转矩值叠加到原始转矩值上共同进行积分运算从而减小预设速度调节运算中的比例增益系数和积分增益系数在电机控制总传递函数中的占比。预设速度调节运算为速度环的一步,通过减小比例增益系数和积分增益系数在电机控制总传递函数中的占比,降低负载的转动惯量发生波动时由于速度环响应带宽波动对电机速度和电机位置的控制结果的影响程度。
技术研发人员:何俊辉
受保护的技术使用者:深圳市英威腾电气股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!