一种采用测距传感器控制光伏清扫机器人的系统和方法与流程
本发明涉及光伏清扫机器人控制领域,具体涉及一种采用测距传感器控制光伏清扫机器人的系统和方法。
背景技术:
1、清扫机运行过程中若存在偏移会导致导向轮卡住。现有解决方案中,对清扫机的偏移通常采用对电机的实时控制,从而调整行走轮的运行速度以避免偏移。但这种实现方式过多依赖于对电机信号的获取且频繁调整电机运行参数,存在判断不够直观的问题,对清扫机的正常运行存在一定干扰。
技术实现思路
1、为了解决上述技术问题,本发明提供一种采用测距传感器控制光伏清扫机器人的系统。
2、具体的,本发明的技术方案如下:
3、第一方面,本发明提供的一种采用测距传感器控制光伏清扫机器人的系统,包括:
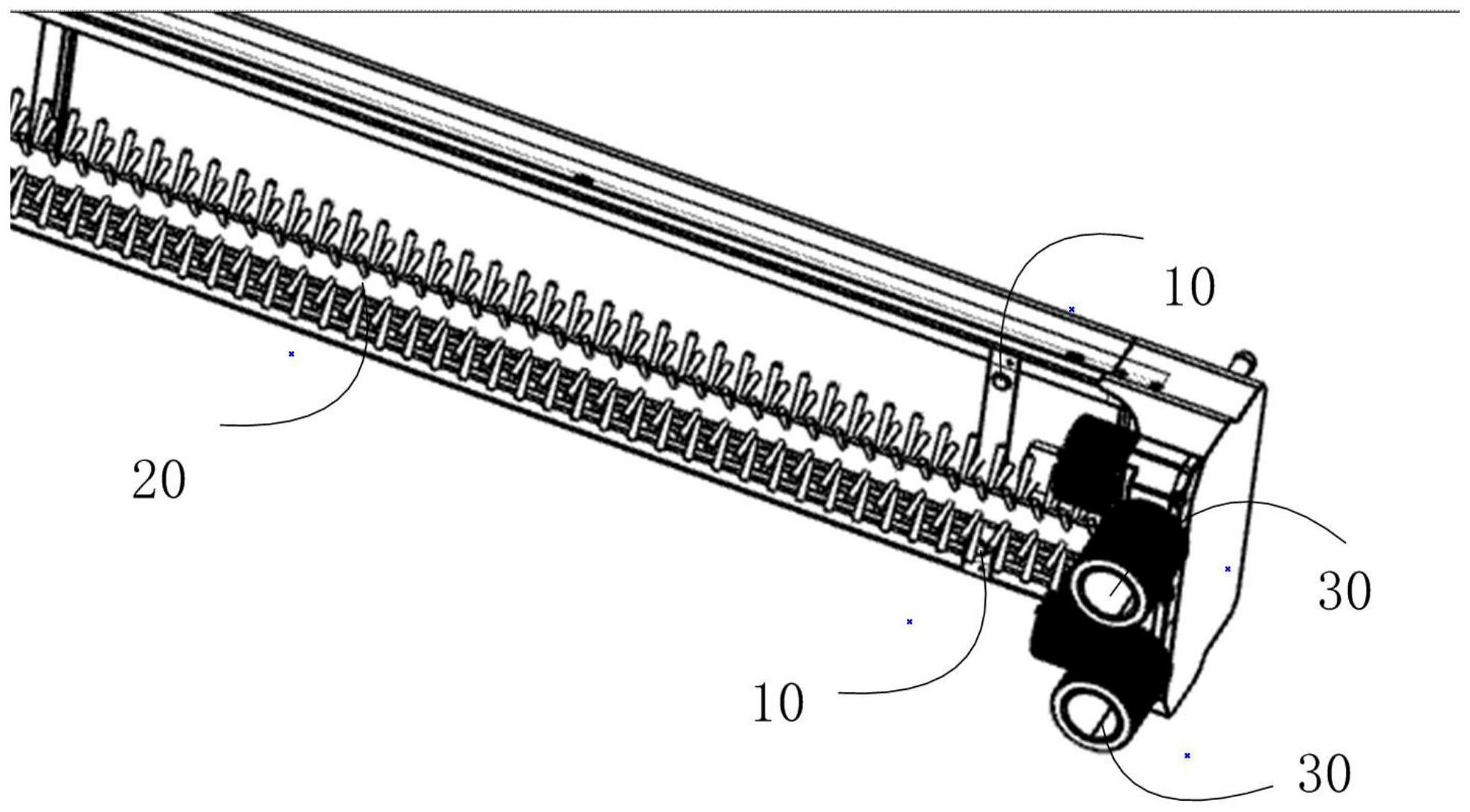
4、测距传感器,包括第一测距传感器和第二测距传感器,所述第一测距传感器和所述第二测距传感器沿预设清扫方向分别对称安装于所述光伏清扫机器人的一侧机头,且朝向与所述光伏清扫机人下方;
5、所述第一测距传感器和所述第二测距传感器,用于在所述光伏清扫机器人进行清扫的过程中,分别测量所述第一测距传感器和所述第二测距传感器到所述光伏清扫机器人所在的光伏组件的玻璃表面的距离,获得第一测量距离和第二测量距离;将所述第一测量距离和所述第二测量距离发送给控制中心;
6、所述控制中心,与所述测距传感器连接,用于根据所述第一测量距离、所述第二测量距离,识别所述光伏清扫机器人是否处于正常工况,并控制所述光伏清扫机器人执行相应的操作。
7、本实施方法中光伏清扫机器人上的测距传感器正对着光伏组件的玻璃表面测量,测量得到的测量距离是测距传感器与光伏组件之间的距离,根据测量距离的变化可以判断出光伏清扫机器人是否处于正常工况,进而对光伏清扫机器人执行与工况相应的操作。
8、在一些采用测距传感器控制光伏清扫机器人的系统的实施方法,
9、所述第一测距传感器和所述第二测距传感器,还用于在所述光伏清扫机器人经过光伏系统的连接桥架时,将测量得到的所述第一测距传感器到地面的距离作为所述第一测量距离,将测量得到的所述第二测距传感器到地面的距离作为所述第二测量距离。
10、所述第一测距传感器和所述第二测距传感器,还用于在所述光伏清扫机器人经过所述光伏组件间隙的过程中,将所述第一测距传感器和所述第二测距传感器前后分别测到地面和所述玻璃表面之间的距离,作为所述第一测量距离和所述第二测量距离。
11、所述控制中心,还用于当所述第一测量距离和所述第二测量距离保持相等的时间不超过预设时间阈值时,识别所述光伏清扫机器人处于正常工况,并根据所述正常工况控制所述光伏清扫机器人进行清扫。
12、本实施方法光伏清扫机器人在经过桥架的过程中,第一测距传感器和第二测距传感器始终都测量的是与地面之间的距离;在光伏清扫机器人经过光伏组件间隙的过程中,第一测距传感器和第二测距传感器分别测量与地面和光伏组件的玻璃表面之间的距离;在进行光伏组件的清扫过程中,第一测距传感器和第二测距传感器始终都测量的是与光伏组件的玻璃表面之间的距离。因此,光伏清扫机器人正常工况下经过桥架或光伏组件,第一测量距离和第二测量距离应该保持相等;光伏清扫机器人在正常工况下经过光伏组件间隙时,在固定时间间隔的两个时间点,第一测距传感器和第二测距传感器的距离差绝对值应保持相等,该距离差为预设第一距离差阈值。
13、在一些采用测距传感器控制光伏清扫机器人的系统的实施方法,
14、所述控制中心,还用于根据所述第一测量距离和所述第二测量距离,得到测量距离差;
15、所述控制中心,还用于当固定时间间隔的两个时间点得到的所述测量距离差均为预设第一距离差阈值时,识别所述光伏清扫机器人处于正常工况,并根据所述正常工况控制所述光伏清扫机器人进行清扫;
16、其中,所述固定时间间隔是根据所述第一测距传感器和所述第二测距传感器之间的安装间距和所述光伏清扫机器人的实时清扫行进速度计算得到。
17、本实施方法中光伏清扫机器人在经过光伏组件之间的间隙时,在固定时间间隔的两个时间点,第一测距传感器和第二测距传感器会分别测量到与光伏组件的玻璃表面的距离、与地面之间的距离。因此,在固定时间间隔的两个时间点,出现这种第一测距传感器和第二测距传感器得到的测量距离不相等但两个测距传感器的测量距离差绝对值相等的情况,属于光伏清扫机器人通过光伏组件间隙的正常工况。
18、在一些采用测距传感器控制光伏清扫机器人的系统的实施方法,
19、所述控制中心,还用于当所述第一测量距离和所述第二测量距离保持相等的时间超出预设时间阈值时,识别所述光伏清扫机器人处于第一异常工况,并根据所述第一异常工况控制所述光伏清扫机器人执行第一回退操作;所述第一回退操作是所述光伏清扫机器人沿所述预设清扫方向的反方向持续回退,直至所述光伏清扫机器人在固定时间间隔的两个时间点得到的所述测量距离差均为所述预设第一距离差阈值。
20、本实施方法中光伏清扫机器人保持相等的时间超出预设时间阈值,则光伏清扫机器人在预设时间阈值内始终处于光伏桥架或同一块光伏组件,可能出现卡死情况,需要进行回退,直到离开当前所在的光伏桥架或光伏组件。
21、在一些采用测距传感器控制光伏清扫机器人的系统的实施方法,
22、所述控制中心,还用于当所述固定时间间隔的两个时间点得到的所述测量距离差为预设第二距离差阈值时,识别所述光伏清扫机器人处于第二异常工况,并根据所述第二异常工况执行第二回退操作;所述预设第二距离差阈值根据所述光伏机器人的导向轮高度设置,所述第二回退操作是控制所述光伏清扫机器人沿所述预设清扫方向的反方向持续回退,直至所述第一测量距离和所述第二测量距离相等。
23、本实施方法中在导向轮爬上光伏组件时,第一测距传感器和第二测距传感器检测到的测量距离差是导向轮高度,此时光伏机器人处于异常工作状态,存在掉落风险,需要回退到第一测量距离和第二测量距离相等,即导向轮从光伏组件上回到光伏组件边框侧面。
24、在一些采用测距传感器控制光伏清扫机器人的系统的实施方法,
25、所述控制中心,还用于还用于当所述固定时间间隔的两个时间点得到的所述测量距离差为预设第三距离差阈值时,识别所述光伏清扫机器人处于第三异常工况,并根据所述第三异常工况执行反复清扫操作;所述反复清扫操作是控制所述光伏清扫机器人对所述光伏清扫机器人的当前位置点进行反复清扫。
26、本实施方法在光伏组件上存在污渍时,光伏清扫机器人对该组件清扫时,由于污渍第一传感器和第二传感器会检测到不同大小的测量距离,根据测量距离差是否处于阈值范围内,判断是否需要对当前位置点是否进行反复清扫去除污渍。
27、第二方面,本发明提供的一种采用测距传感器控制光伏清扫机器人的方法,包括:
28、测距传感器,包括第一测距传感器和第二测距传感器,在所述光伏清扫机器人进行清扫的过程中,分别测量所述第一测距传感器和所述第二测距传感器到所述光伏清扫机器人所在的光伏组件的玻璃表面的距离,获得第一测量距离和第二测量距离;
29、根据所述第一测量距离、所述第二测量距离识别所述光伏清扫机器人是否处于正常工况,并控制所述光伏清扫机器人执行相应的操作。
30、本实施方法中光伏清扫机器人在经过光伏组件之间的间隙时,在固定时间隔的两个时间点,第一测距传感器和第二测距传感器会分别测量到测距传感器与光伏组件之间的距离,测距传感器与地面之间的距离;因此,出现这种第一测距传感器和第二测距传感器得到的测量距离不相等的情况,属于光伏清扫机器人通过光伏组件间隙的正常工况。
31、在一些采用测距传感器控制光伏清扫机器人的方法,所述的根据所述第一测量距离、所述第二测量距离识别所述光伏清扫机器人是否处于正常工况,并控制所述光伏清扫机器人执行相应的操作,包括:
32、在所述光伏清扫机器人经过光伏系统的连接桥架时,将测量得到的所述第一测距传感器到地面的距离作为所述第一测量距离,将测量得到的所述第二测距传感器到地面的距离作为所述第二测量距离,
33、或,还用于在所述光伏清扫机器人经过所述光伏组件间隙的过程中,将所述第一测距传感器和所述第二测距传感器前后分别测到地面和所述玻璃表面之间的距离,作为第一测量距离和第二测量距离;
34、根据所述第一测量距离和所述第二测量距离,得到测量距离差;
35、当所述固定时间间隔的两个时间点得到的所述测量距离差均为预设第一距离差阈值时,识别所述光伏清扫机器人处于正常工况,并根据所述正常工况控制所述光伏清扫机器人进行清扫;
36、其中,所述固定时间间隔是根据所述第一测距传感器和所述第二测距传感器之间的安装间距和实时清扫行进速度计算得到。
37、本实施方法光伏清扫机器人在经过光伏组件之间的间隙时,在固定时间间隔的两个时间点,第一测距传感器和第二测距传感器会分别测量到与光伏组件的玻璃表面的距离、与地面之间的距离;因此,在固定时间间隔的两个时间点,出现出这种第一测距传感器和第二测距传感器得到的测量距离不相等但两个测距传感器的测量距离差绝对值相等,属于光伏清扫机器人通过光伏组件间隙的正常工况。
38、在一些采用测距传感器控制光伏清扫机器人的方法的实施方法,所述的根据所述第一测量距离、所述第二测量距离识别所述光伏清扫机器人是否处于正常工况,并控制所述光伏清扫机器人执行相应的操作,包括:
39、当所述第一测量距离和所述第二测量距离保持相等的时间不超过预设时间阈值时,识别所述工作状况是正常工况,并根据所述正常工况控制所述光伏清扫机器人进行清扫;
40、当所述第一测量距离和所述第二测量距离保持相等的时间超出预设时间阈值时,识别所述光伏清扫机器人处于第一异常工况,并根据所述第一异常工况控制所述光伏清扫机器人执行第一回退操作;所述第一回退操作是控制所述光伏清扫机器人沿所述预设清扫方向的反方向持续回退,直至所述光伏清扫机器人在固定时间间隔的两个时间点得到的所述测量距离差均为所述预设第一距离差阈值。
41、本实施方法中光伏清扫机器人保持相等的时间超出预设时间阈值,则光伏清扫机器人在预设时间阈值内始终处于光伏桥架或同一块光伏组件,可能出现卡死情况,需要进行回退,直到离开当前所在的光伏桥架或光伏组件。
42、在一些采用测距传感器控制光伏清扫机器人的方法的实施方法,所述的根据所述第一测量距离、所述第二测量距离识别所述光伏清扫机器人是否处于正常工况,并控制所述光伏清扫机器人执行相应的操作,包括:
43、当所述固定时间间隔的两个时间点得到的所述测量距离差为预设第二距离差阈值时,识别所述光伏清扫机器人处于第二异常工况,并根据所述第二异常工况执行第二回退操作;所述第二回退操作是控制所述光伏清扫机器人沿所述预设清扫方向的反方向持续回退,直至所述第一测量距离和所述第二测量距离相等。
44、本实施方法中在导向轮爬上光伏组件时,第一测距传感器和第二测距传感器检测到的测量距离差是导向轮高度,此时光伏机器人处于异常工作状态,存在掉落风险,需要回退到第一测量距离和第二测量距离相等,即导向轮从光伏组件上回到光伏组件边框侧面。
45、与现有技术相比,本发明至少具有以下一项有益效果:
46、1、本发明光伏清扫机器人上的测距传感器正对着光伏组件玻璃表面测量,测量得到的测量距离随清扫机移动发生变化,可能是与光伏组件之间的距离,也可能是与地面之间的距离,根据测量距离的变化可以判断出光伏清扫机器人是否处于正常工况,进而对光伏清扫机器人执行与工况相应的操作,避免光伏清扫机在执行清扫任务时长时间卡死。
47、2、本发明光伏清扫机器人正常工况下经过桥架或光伏组件,两个测距传感器的测量值应该保持相等,进而可将两个测距传感器的测量值保持一定时间内相等作为光伏清扫机器人处于正常工况的判断条件之一。
48、3、本发明光伏清扫机器人保持相等的时间超出预设时间阈值,则光伏清扫机器人在预设时间阈值内始终处于光伏桥架或同一块光伏组件,可能出现光伏清扫机器人偏移卡住的情况,需要进行回退,直到离开当前所在的光伏桥架或光伏组件。
49、4、本发明光伏清扫机器人在经过光伏组件之间的间隙时,第一测距传感器和第二测距传感器会在固定时间间隔的两个时间点分别测量到与光伏组件之间的距离、与地面之间的距离;通过判断此时两个测距传感器的测量距离差是否为预设第一距离阈值,可判断光伏清扫机器人经过光伏组件间隙是否为正常工况。
50、5、本发明中在导向轮爬上光伏组件时,第一测距传感器和第二测距传感器检测到的测量距离差是导向轮高度,此时光伏机器人处于异常工作状态,存在掉落风险,需要回退到第一测量距离和第二测量距离相等,也就是将导向轮从光伏组件上回退到正常位置处;
51、6、本发明光伏清扫机器人还可根据测量距离差分析光伏组件上是否存在污渍,进而对污渍处进行反复清洁,提升清扫效率。
- 还没有人留言评论。精彩留言会获得点赞!