基于NDO的交错并联Boost变换器复合控制方法
本发明属于变换器控制,具体涉及基于ndo的交错并联boost变换器复合控制方法。
背景技术:
1、在含恒功率负载的交错并联变换器传输电能时,除了已解决的恒功率负载而降低系统阻尼和电路参数偏差所带来的不利影响外,还需要解决复合控制律中均包含的输出电流和输入电压扰动。一般情况下,通过实时计算获取其动态变化值,能够抑制外部扰动的影响。但这种方法需要电压、电流传感器来实时采集输入电压和输出电流数据,加重了成本负担和实验难度。
技术实现思路
1、本发明的目的是提供基于ndo的交错并联boost变换器复合控制方法,能够抑制外部干扰对系统的影响,从而保证系统稳定性及暂态性能。
2、本发明所采用的技术方案是,基于ndo的交错并联boost变换器复合控制方法,将输出电流及输入电压部分看作外部扰动,设计非线性扰动观测器ndo分别对各扰动项进行估计测量,将观测到的扰动量应用于交错并联boost变换器终端滑模与微分平坦控制结合的串级控制器中,对输入电压及负载扰动进行补偿,以实现系统稳定运行,其中,非线性扰动观测器用于不确定性扰动的估计,并以前馈补偿的方式对干扰进行了抑制。
3、本发明的特点还在于,
4、具体按照以下步骤实施:
5、步骤1:设计非线性扰动观测器ndo
6、建立含有外部扰动和系统内部不确定项扰动的系统模型,确定增益系数,设计带有动态负载扰动补偿的ndo模型;
7、步骤2:基于非线性扰动观测器的复合控制设计
8、将步骤1设计的非线性扰动观测器ndo应用于串级控制器的微分平坦控制结合全局快速终端滑模控制dfgftsmc中,对输入电压及负载扰动进行补偿,实现复合控制。
9、步骤1具体为,
10、对于存在扰动的非线性时变系统,表达式可列为:
11、
12、式(4.1)中,x——系统状态向量,f(x)——系数矩阵;u——系统控制向量,g1(x)——系统输入矩阵;d——系统扰动向量,g2(x)——系统扰动函数矩阵;y——系统输出向量,h(x)——系统输出函数矩阵;
13、设计如下非线性干扰观测器对式(4.1)中的扰动d进行估计:
14、
15、式(4.2)中,z是ndo的内部状态估计,p(x)是待设计的非线性函数,是ndo中扰动项估计;
16、确定含恒功率负载的交错并联boost变换器系统的状态向量x和扰动向量d分别为:
17、
18、式(4.6)中,il1、il2、il3分别为交错并联boost变换器电感l1、l2、l3的电流信号,vo为交错并联boost变换器电容两端的电压信号,d1、d2、d3分别为交错并联boost变换器开关元件s1、s2、s3的导通占空比;
19、将式(4.6)代入式(3.5)中,建立含有外部扰动和系统内部不确定项扰动的系统模型:
20、
21、式(4.7)中,c为输出端稳压电容,x1、x2、x3分别为交错并联boost变换器电感l1、l2、l3的电流信号il1、il2、il3,x4为交错并联boost变换器电容两端的电压信号vo,即x1=il1,x2=il2,x3=il3,x4=v0;
22、通过ndo增益函数l(x)的定义
23、
24、式(4.3)中,p(x)是待设计的非线性函数
25、求得增益函数矩阵为:
26、
27、根据式(4.8)可知,满足l(x)g2(x)>0时,观测器估计误差渐进收敛,时间常数为t=1/l(x)g2(x);
28、基于式(4.8)所建立的非线性模型,得到函数矩阵为:
29、
30、对于式(4.7)所示系统,设计带有动态输入电压扰动补偿的ndo模型,其表达式为:
31、
32、式(4.10)中,z1表示输入电压扰动观测器的内部状态量,表示对扰动量输入电压vin的估计;
33、对于式(4.7)所示系统,设计带有动态负载扰动补偿的ndo模型,其表达式为:
34、
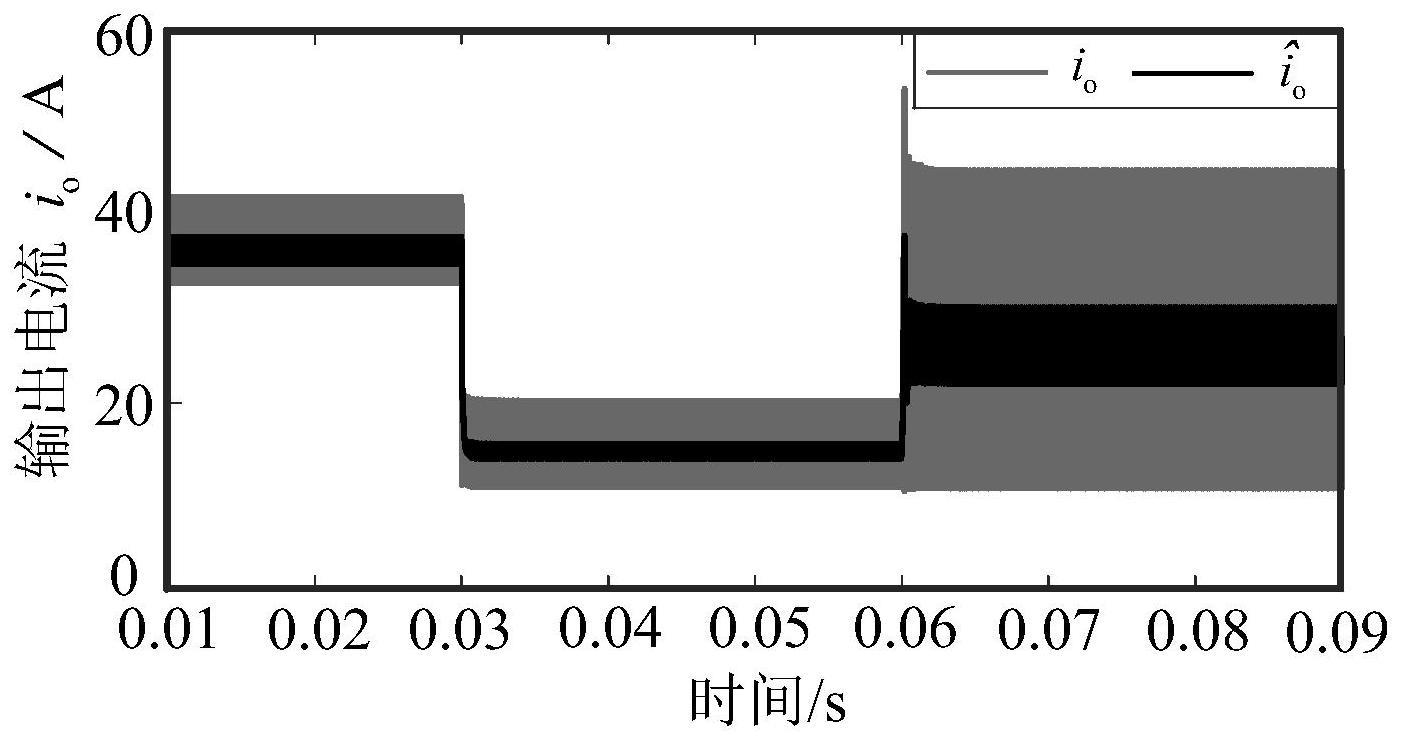
35、式(4.11)中,z2表示负载电流扰动观测器的内部状态量,表示对扰动量负载电流io的估计。
36、步骤1中,为简化交错并联系统中非线性干扰观测器的设计,同时保证各相电感电流均衡,可以确定增益系数l1=l2=l3>0,l4<0。
37、步骤2具体为,
38、对于交错并联boost变换器终端滑模与微分平坦控制结合的串级控制器,在稳态均流时,交错并联boost变换器的各相电感电流存在下列关系:
39、ilref1=ilref2=ilref3=ilref (3.27)
40、式(3.27)中,ilref1、ilref2、ilref3分别为电感电流il1、il2、il3的参考值;
41、带恒阻性负载和恒功率负载的三相交错并联boost变换器的总体状态方程为:
42、
43、根据内环电感电流平坦输出的设计需求,选取电感电流作为内环平坦输出变量yc和状态变量xc,表示为:
44、xc=yc[il1 il2 il3]t=γ1(yc) (3.25)
45、将式(3.25)代入式(3.5)中可得平坦输出量及其导数构成的输入变量的表达式为:
46、
47、根据式(4.19)可知,在ndo对输入电压的估计下,补偿了平坦控制受外界输入电压扰动的影响;
48、外环系统的控制目标是保证输出电压恒定,可通过对电容能量的偏差进行修正,来间接控制输出电压,设电容能量函数为:
49、
50、忽略系统内损时,电容能量的导数克表示为:
51、
52、在外环全局快速终端滑模控制中设计yv=ev,状态变量为:
53、
54、设计全局快速终端滑模面为:
55、
56、式(2.17)中α>0,β>0为滑模面系数,p、q均为正奇数且p<q<2p;
57、引入终端趋近律来抑制滑模在趋近运动中的抖振影响,终端趋近律表达式为:
58、
59、式中θ1、θ2均为大于零的常数,0<r<1;
60、对于交错并联boost变换器终端滑模与微分平坦控制结合的串级控制器,构造lyapunov函数为:
61、
62、v1为任意初值,并认为v1为正定矩阵,满足其中σmin、σmax均为正数,sg为全局快速终端滑模面;
63、对式(3.41)求导可得:
64、
65、式(3.42)中,0<(r+1)/2<1;
66、根据(3.42)得,考虑补偿未匹配扰动的外环控制律表示为:
67、
68、式(4.20)中,vo表示稳态输出电压,vin为输入电压信号,α,β为滑模面系数均大于零;p、q均为正奇数且p<q<2p,θ1,θ2为终端趋近律的系数且均大于零,为ndo对未匹配扰动的估计,io0是负载电流的稳态值。
69、本发明的有益效果是:
70、本发明基于ndo的交错并联boost变换器复合控制方法,提出了一种非线性扰动观测器与串级微分平坦-全局快速终端滑模相结合的控制策略,对输入电压及负载扰动进行补偿,以实现系统稳定运行;其中,非线性扰动观测器的控制系统能够进一步抑制外界扰动,并且实现在线跟踪。
- 还没有人留言评论。精彩留言会获得点赞!