变周期广义双矢量模型预测电流控制方法及相关设备
本技术涉及电力控制,尤其涉及一种变周期广义双矢量模型预测电流控制方法及相关设备。
背景技术:
1、近年来,模型预测控制被广泛应用于永磁同步电机控制领域。传统的模型预测控制无法准确跟踪参考值,稳态性能差。逆变器的开关状态受电压矢量和矢量作用时间的影响。传统模型预测控制所选择的电压矢量将作用在整个控制周期,即电压矢量的作用时间是固定的,唯一的自由度就是电压矢量的选择。受限于有限的开关状态,传统模型预测控制无法准确跟踪参考值。虽然可以通过提高开关频率或者降低控制周期的方法来提高稳态性能,但是会导致开关损耗增加。
2、因此,探求一种在不增加开关频率的条件下能够提高系统稳态性能且易于实现的方法是必要的。
技术实现思路
1、有鉴于此,本技术的目的在于提出一种克服上述问题或者至少部分地解决上述问题的变周期广义双矢量模型预测电流控制方法及相关设备。
2、基于上述目的,本技术的第一方面,提供了一种变周期广义双矢量模型预测电流控制方法,包括:
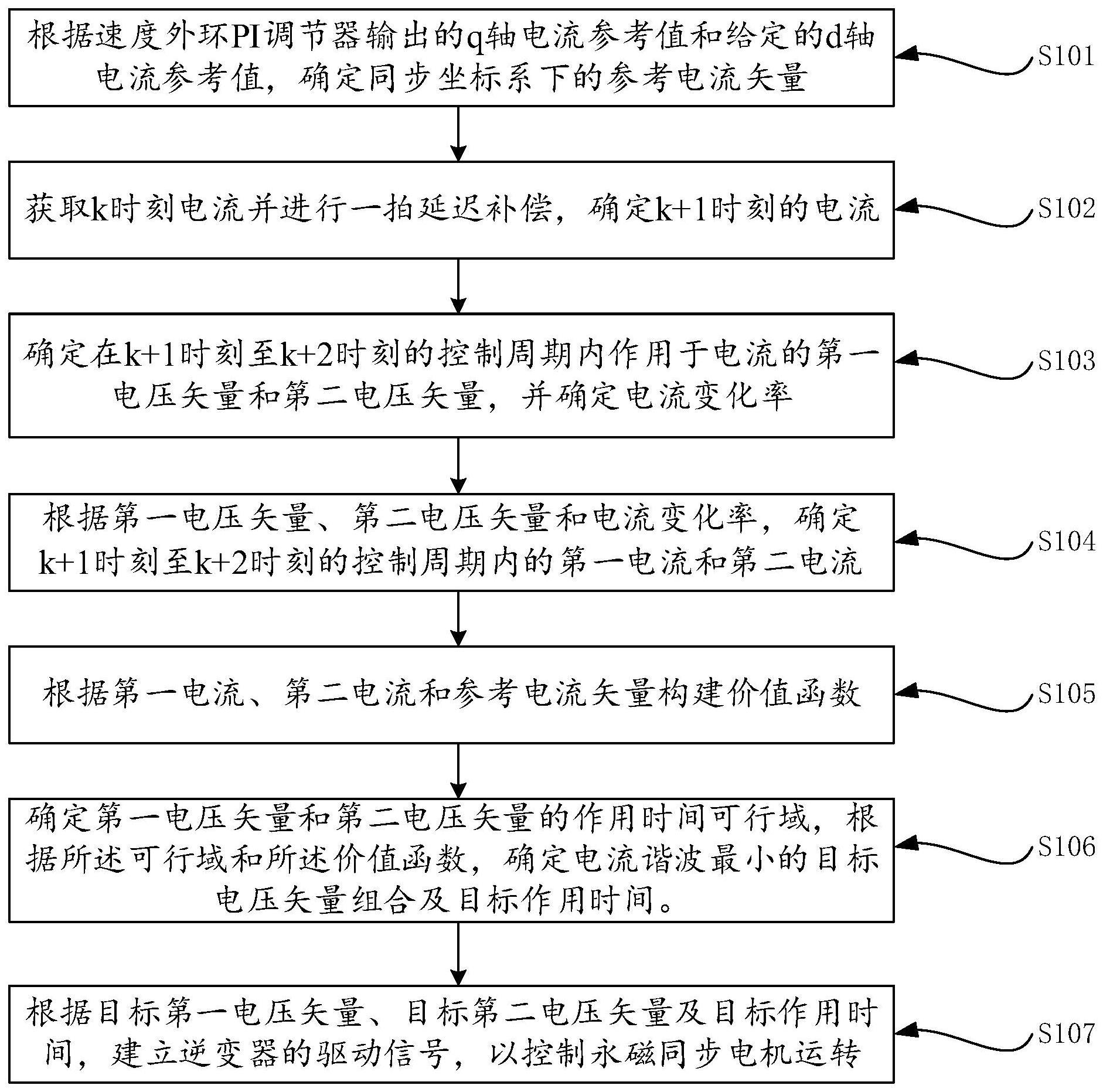
3、根据速度外环pi调节器输出的q轴电流参考值和给定的d轴电流参考值,确定同步坐标系下的参考电流矢量;
4、获取k时刻电流并进行一拍延迟补偿,确定k+1时刻的电流;
5、确定在所述变周期广义双矢量模型k+1时刻至k+2时刻的控制周期内作用于所述电流的第一电压矢量和第二电压矢量,并确定电流变化率;
6、根据所述第一电压矢量、所述第二电压矢量和所述电流变化率,确定所述k+1时刻至k+2时刻的控制周期内的第一电流和第二电流;
7、根据所述第一电流、所述第二电流和所述参考电流矢量构建价值函数;
8、确定所述第一电压矢量和所述第二电压矢量的作用时间可行域,根据所述作用时间可行域和所述价值函数,确定电流谐波最小的目标第一电压矢量、目标第二电压矢量及目标作用时间;
9、根据所述目标第一电压矢量、目标第二电压矢量及目标作用时间,建立逆变器的驱动信号,以控制永磁同步电机运转。
10、可选的,所述参考电流矢量为:
11、
12、其中,为同步坐标系下的q轴电流参考值,为同步坐标系下的d轴电流参考值。
13、可选的,所述k+1时刻的电流表示为:
14、
15、其中,是k到k+1时刻的控制周期;是k到k+1时刻的平均电压矢量;为k时刻的电流值;ωr是电角速度;rs为定子电阻,ls为交直轴电感,ψf为永磁体磁链。
16、所述第一电流表示为:
17、
18、其中,为k+1时刻的电流,t1为k+1时刻至k+2时刻作用的第一电压矢量的作用时间,δi1为k+1时刻至k+2时刻作用第一电压矢量的电流变化率;
19、所述第二电流表示为:
20、
21、其中,为k+1时刻的电流,δi1为k+1时刻的电流变化率,t2为k+1时刻至k+2时刻作用的第二电压矢量的作用时间,δi2为k+1时刻至k+2时刻作用第二电压矢量的电流变化率。
22、可选的,所述价值函数表示为:
23、
24、其中,λ为权重系数;fs表示开关次数,为k到k+1时刻的第二电压矢量的开关状态、为k+1到k+2时刻的第一电压矢量的开关状态,为k+1到k+2时刻的第二电压矢量的开关状态,为参考电流矢量,为第一电流,为第二电流、t1为k+1时刻至k+2时刻作用的第一电压矢量的作用时间,t2为k+1时刻至k+2时刻作用的第二电压矢量的作用时间,表示2范数的平方。
25、可选的,所述作用时间可行域表示为:
26、d={tfirst+tsecond≧tmin∩tfirst+tsecond≦tmax∩0≦tfirst≦tmax∩0≦tsecond≦tmax}
27、其中,tmax表示最大控制周期;tmin表示最小控制周期,tfirst为k+1时刻作用的第一电压矢量的最佳作用时间,tsecond为k+2时刻作用的第二电压矢量的最佳作用时间;
28、所述确定所述第一电压矢量和所述第二电压矢量的作用时间可行域,根据所述作用时间可行域和所述价值函数,确定电流谐波最小的目标电压矢量组合及目标作用时间,包括:
29、确定作用时间可行域,利用无约束极值计算所述可行域中所述第一电压矢量和所述第二电压矢量的最佳作用时间;
30、响应于所述第一电压矢量和所述第二电压矢量的最佳作用时间不在所述可行域中,则所述第一电压矢量和所述第二电压矢量的最佳作用时间在所述可行域的边界;
31、利用拉个朗日函数求解所述可行域的边界,确定所述第一电压矢量和所述第二电压矢量的最佳作用时间;
32、遍历所有电压矢量组合,求解所有电压矢量组合的第一电压矢量和第二电压矢量的最佳作用时间;
33、将所有电压矢量组合及其最佳作用时间带入价值函数,确定价值函数最小的电压矢量组合及其最佳作用时间为目标电压矢量组合及目标作用时间。
34、本技术的第二方面,提供了一种变周期广义双矢量模型预测电流控制装置,包括:
35、电流矢量模块,根据速度外环pi调节器输出的q轴电流参考值和给定的d轴电流参考值,确定同步坐标系下的参考电流矢量;
36、补偿模块,用于获取k时刻电流并进行一排延迟补偿,确定k+1时刻的电流;
37、电流变化率模块,用于确定在所述变周期广义双矢量模型k+1时刻至k+2时刻的控制周期内作用于所述电流的第一电压矢量和第二电压矢量,并确定电流变化率;
38、电流确定模块,用于根据所述第一电压矢量、所述第二电压矢量和所述电流变化率,确定所述k+1时刻至k+2时刻的控制周期内的第一电流和第二电流;
39、价值函数模块,用于根据所述第一电流、所述第二电流和所述参考电流矢量构建价值函数;
40、目标电压矢量确定模块,用于确定所述第一电压矢量和所述第二电压矢量的作用时间可行域,根据所述作用时间可行域和所述价值函数,确定电流谐波最小的目标第一电压矢量、目标第二电压矢量及目标作用时间;
41、控制模块,用于根据所述目标第一电压矢量、目标第二电压矢量及目标作用时间,建立逆变器的驱动信号,以控制永磁同步电机运转。
42、本技术的第三方面,提供了一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如第一方面所述的方法。
43、本技术的第四方面,提供了一种非暂态计算机可读存储介质,所述非暂态计算机可读存储介质存储计算机指令,其特征在于,所述计算机指令用于使计算机执行如第一方面所述的方法。
44、从上面所述可以看出,本技术提供的变周期广义双矢量模型预测电流控制方法及相关设备,增加了控制周期可变这一自由度,每个电压矢量的作用时间都可以求解,综合考虑程序执行时间和离散误差,再对电流进行一拍延迟补偿后,定义电压矢量组合的作用时间可行域,利用价值函数求解确定使价值函数最小的电压矢量组合和最佳作用时间,再不增加开关频率的条件下,降低电流谐波,提高了系统稳态性能。
45、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!