一种实现LCI驱动同步电机负载扰动观测补偿的PI控制系统
本发明涉及电机控制,尤其涉及一种实现lci驱动同步电机负载扰动观测补偿的pi控制系统。
背景技术:
1、lci(load commutated inverter,负载换流逆变器)是一种大功率的同步电机驱动装置,因拥有更高的效率、造价低、结构简单和容量大等优势,常常用于同步调相机、抽水蓄能、大型燃气轮机、空气压缩机等电力传动等大功率场合,对工业生产与国防基础设备安全具有至关重要的作用。lci由于晶闸管的半控特性,同时也具有稳态误差大、动态响应慢等一系列问题。
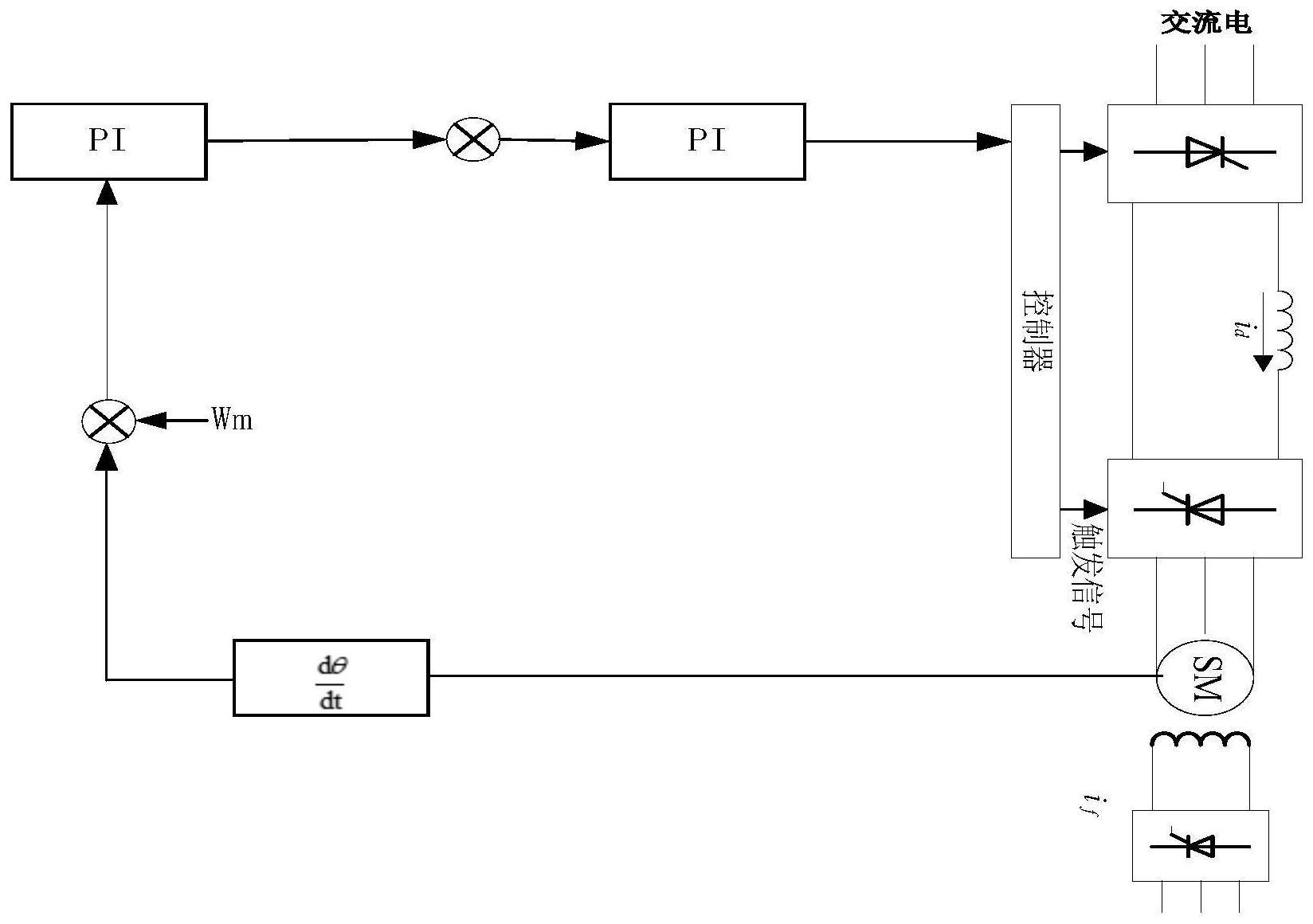
2、目前,lci为基于半控型器件晶闸管的整流逆变拓扑结构,使得相应的lci驱动同步电机软起动拓扑结构,如图1所示。其中,直流母线上搭载电感,使得直流母线上的直流更稳定。此时,通过给定机械转速与检测到的机械转速的差值作为外环输入,并将输出的直流母线电流给定值与检测到的直流母线电流的差值作为内环输入,从而构成双闭环结构控制lci驱动同步电机,如图2所示。在图2中,外环为速度环pi控制,内环为电流环pi控制,其控制效果能够让电机转速与给定转速的误差趋近于0;其中,wm为给定的电机转速;id为直流母线电流给定值;α为系统整流电路中的导通整流角。
3、在lci驱动同步电机控制系统的实际应用中,阶跃负载变化是电机最苛刻的带载控制需求,需要对动态响应能力提出更高的要求。然而,现有lci驱动同步电机的双闭环结构控制在负载变化和转速发生变化时,对负载扰动变化的动态响应不佳,使得抗干扰能力较弱,无法保证运行状态始终处于最佳状态。因此,有必要提供一种新的解决方案,能够通过补偿控制来提高lci驱动同步电机运行过程中抗阶跃负载扰动的能力,保证运行状态始终处于最佳状态。
技术实现思路
1、本发明实施例所要解决的技术问题在于,提供一种实现lci驱动同步电机负载扰动观测补偿的pi控制系统,能够通过补偿控制来提高lci驱动同步电机运行过程中抗阶跃负载扰动的能力,保证运行状态始终处于最佳状态。
2、为了解决上述技术问题,本发明实施例提供了一种实现lci驱动同步电机负载扰动观测补偿的pi控制系统,用于lci驱动同步电机上,包括用于控制lci驱动同步电机转速的双闭环pi控制结构,还包括:设置于所述双闭环pi控制结构上的龙伯格观测器;其中,
3、所述龙伯格观测器,用于对所述lci驱动同步电机的负载转矩变化进行观测,并将所测得的观测值前馈到所述双闭环pi控制结构的外环pi控制中,以实现对所述lci驱动同步电机的转矩变量进行补偿控制之后,使所述lci驱动同步电机能在低速时采用断续换流方式或在高速时采用负载换流方式来确保运行状态稳定;其中,所述观测值是由所述lci驱动同步电机的状态量决定的,包括转子位置以及转速。
4、其中,所述龙伯格观测器利用前馈系数h与观测值的乘积对外环进行前馈控制;其中,
5、所述前馈系数h为所述龙伯格观测器中预设的特征方程的实部全部为负时求解出来的极点;所述特征方程的表达式为
6、反馈矩阵h=[h1 h2];tl为外部所加的负载转矩,即观测的负载转矩;j为lci驱动同步电机的转动惯量;wm为lci驱动同步电机的转速;te为lci驱动同步电机的电磁转矩,b1为lci驱动同步电机的粘滞摩擦系数;为lci驱动同步电机的转速的一阶导数。
7、其中,所述龙伯格观测器为用于实现lci驱动同步电机的转速、转子位置、电流及电压采集及分析的数字信号处理器或单片机。
8、其中,所述断续换流方式及所述负载换流方式均是通过控制lci中晶闸管的超前换相角的大小来实现晶闸管的通断,以确保对lci驱动同步电机转速的控制调整。
9、实施本发明实施例,具有如下有益效果:
10、相比于传统的双闭环pi控制结构,本发明基于龙伯格观测器对lci驱动同步电机变化的负载扰动进行观测,并采用前馈控制对系统进行补偿控制的策略,达到负载变化时lci驱动同步电机仍能快速稳定运行为目的,不仅有加载瞬间转速跌落更小,调节时间更短等更优秀的控制效果,还能够通过补偿控制来提高lci驱动同步电机运行过程中抗阶跃负载扰动的能力,保证运行状态始终处于最佳状态。
技术特征:
1.一种实现lci驱动同步电机负载扰动观测补偿的pi控制系统,用于lci驱动同步电机上,包括用于控制lci驱动同步电机转速的双闭环pi控制结构,其特征在于,还包括:设置于所述双闭环pi控制结构上的龙伯格观测器;其中,
2.如权利要求1所述的实现lci驱动同步电机负载扰动观测补偿的pi控制系统,其特征在于,所述龙伯格观测器利用前馈系数h与观测值的乘积对外环进行前馈控制;其中,
3.如权利要求2所述的实现lci驱动同步电机负载扰动观测补偿的pi控制系统,其特征在于,所述龙伯格观测器为用于实现lci驱动同步电机的转速、转子位置、电流及电压采集及分析的数字信号处理器或单片机。
4.如权利要求1所述的实现lci驱动同步电机负载扰动观测补偿的pi控制系统,其特征在于,所述断续换流方式及所述负载换流方式均是通过控制lci中晶闸管的超前换相角的大小来实现晶闸管的通断,以确保对lci驱动同步电机转速的控制调整。
技术总结
本发明提供一种实现LCI驱动同步电机负载扰动观测补偿的PI控制系统,用于LCI驱动同步电机上,包括用于控制LCI驱动同步电机转速的双闭环PI控制结构,还包括:设置于双闭环PI控制结构上的龙伯格观测器;龙伯格观测器对LCI驱动同步电机的负载转矩变化进行观测,并将所测得的观测值前馈到双闭环PI控制结构的外环PI控制中;双闭环PI控制结构根据观测值对外环进行前馈控制,以实现对LCI驱动同步电机的转矩变量进行补偿控制之后,使LCI驱动同步电机能在低速时采用断续换流方式或在高速时采用负载换流方式来确保运行状态稳定;其中,观测值是由LCI驱动同步电机的状态量决定的,包括转子位置以及转速。实施本发明,能够通过补偿控制来提高LCI驱动同步电机运行过程中抗阶跃负载扰动的能力,保证运行状态始终处于最佳状态。
技术研发人员:朱志亮,刘高翔,寇佳宝,杨丰睿
受保护的技术使用者:温州大学
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!