马达系统、倍压电路、马达控制方法及电子设备与流程
本技术涉及电子,尤其涉及马达系统、倍压电路、马达控制方法及电子设备。
背景技术:
1、随着电子技术的发展,手机、平板电脑等电子设备一般都配置有摄像头。而摄像头的镜头的越来越重,这就要求马达能够提供更大的推力。但是,手机等电子设备的内部空间十分有限,难以通过增加马达尺寸来提高马达推力。
技术实现思路
1、第一方面,本技术提供了一种马达系统,如图2所示,该马达系统可包括:driveric、倍压电路和音圈马达vcm,三者依次连接。其中,driver ic的输出端连接倍压电路的输入端,倍压电路的输出端连接vcm线圈,可用于将driver ic的输出电压成倍提高后输出到vcm线圈负载两端,从而成倍提高流过vcm线圈的电流,最终显著提高马达推力。
2、结合第一方面,在一些实施例中,第一方面提供的马达系统中,倍压电路还可以用于改变输出到线圈两端的线圈电压的电压极性;当线圈电压的电压极性为第一极性时,线圈电流的方向为第一流向,vcm输出第一方向的马达推力;当线圈电压的电压极性为第二极性时,线圈电流的方向为第二流向,vcm输出第二方向的马达推力。这样,倍压电路可以改变线圈电流方向,从而第一方面提供的马达系统支持马达输出两种方向的马达推力,最终控制被驱动部件(如摄像头的镜头)在双方向上移动。
3、结合第一方面,在一些实施例中,倍压电路可以是第二方面或者第三方面描述的倍压电路。
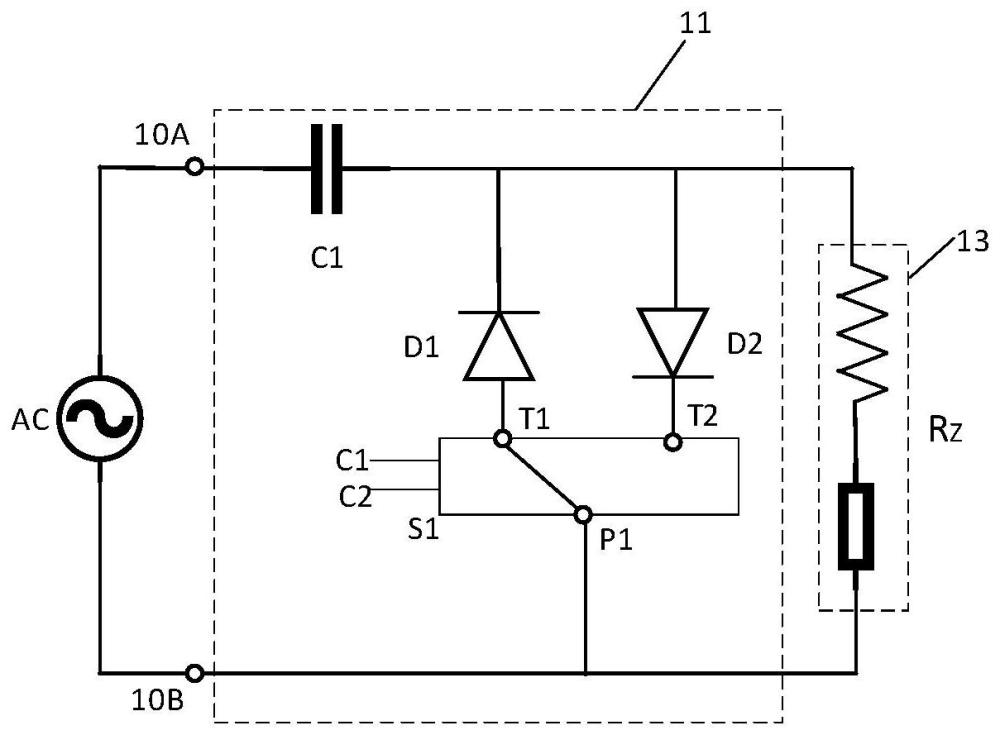
4、第二方面,本技术提供了一种倍压电路,可包括:一个电容c1、第一单向导通装置、第二单向导通装置和开关s1,以及第一输入端、第二输入端、第一输出端、第二输出端;其中:电容c1的第一端耦接第一输入端,电容c1的第二端耦接于第一输出端,第二输出端耦接于第二输入端;第一单向导通装置的一端耦接于电容c1的第二端,另一端耦接于开关s1的第一动端;第二单向导通装置的一端也耦接于电容c1的第二端,另一端耦接于开关s1的第二动端;开关s1的不动端耦接于第二输入端;第一单向导通装置、第二单向导通装置的导通方向相反。
5、第二方面中,第一输入端和第二输入端之间加载的输入电压是交流电压信号。具体的,输入电压可以是脉冲宽度调制pwm电压信号。倍压电路中的开关s1可以是单刀双掷开关。
6、第二方面提供的倍压电路,在将输入电压提高近似两倍的同时,仅需一个电容实施充放电,进一步缩小了电路尺寸,且能改变输出电压的极性电压。当该倍压电路应用于马达系统时,如倍压电路的输入端连接driver ic、输出端连接vcm线圈时,它可以改变线圈电流方向,从而支持马达输出两种方向的马达推力,最终控制被驱动部件(如摄像头的镜头)在双方向上移动。
7、结合第二方面,在一些实施例中,第一单向导通装置可以是二极管d1。第一单向导通装置的一端耦接于电容c1的第二端,另一端耦接于开关s1的第一动端,具体包括:二极管d1的负极耦接于电容c1的第二端,正极耦接于开关s1的第一动端。
8、结合第二方面,在一些实施例中,第二单向导通装置可以是二极管d2。第二单向导通装置的一端也耦接于电容c1的第二端,另一端耦接于开关s1的第二动端,具体包括:二极管d2的正极也耦接于电容c1的第二端,负极耦接于开关s1的第二动端。
9、二极管作的导通压降很小,例如硅管的压降小于等于0.7v,锗管的压降小于等于0.2v。因此,选择二极管作为单向导通装置可以进一步降低导通压降,使得二级倍压电路的输出电压更加接近两倍的输入电压。
10、结合第二方面,在一些实施例中,第二方面的倍压电路的充放电可以包括:当开关s1导通第一动端时,电容c1在输入电压的第一半周期充电,在输入电压的第二半周期放电,第二半周期放电时倍压电路的输出电压的电压极性为第一极性。第一半周期的输入电压的电压极性与第二半周期的输入电压的电压极性相反。当开关s1导通第二动端时,电容c1在输入电压的第二半周期充电,在输入电压的第一半周期放电,第一半周期放电时倍压电路的输出电压的电压极性为第二极性;第二极性与第一极性相反。
11、其中,第一半周期、第二半周期可以分别是负半周、正半周,也可以分别是正半周、负半周,即图5a-图5d中示出的上正下负的输入电压可以是正半周的输入电压,也可以是负半周的输入电压。
12、通过开关s1的选择性导通,可以改变倍压电路的输出电压的极性。当该倍压电路应用于马达系统时,如倍压电路的输入端连接driver ic、输出端连接vcm线圈时,它可以改变线圈电流方向,从而支持马达输出两种方向的马达推力。
13、结合第二方面,在一些实施例中,开关s1还可以包括控制端,控制端耦接于控制单元。当控制端接收到第一控制信号时,开关s1选择导通第一动端;当控制端接收到第二控制信号时,开关s1选择导通第二动端。
14、结合第二方面,在一些实施例中,二级倍压电路还可以包括一个偏置电阻r1,偏置电阻r1串接于开关s1的不动端和驱动集成电路的第二输出端之间。即,第一单向导通装置(如二极管d1)、第二单向导通装置(如二极管d2)的充放电电路共用的偏置电阻,一起调整这两个充放电电路的充放电时间。
15、结合第二方面,在一些实施例中,二级倍压电路还可以包括两个偏置电阻r1、r2,其中,偏置电阻r1串接于第一单向导通装置和开关s1的第一动端之间,偏置电阻r2串接于第二单向导通装置的负极和开关s1的第二动端之间。即,这两个偏置电阻分别串接于第一单向导通装置(如二极管d1)、第二单向导通装置(如二极管d2)的充放电电路中,以独立调整这两个充放电电路的充放电时间。
16、第三方面,本技术提供了一种倍压电路,如图7a所示,该倍压电路可以包括n级倍压电路和开关s1,n≥2,n是正整数。该倍压电路中的第n级充放电电路中的电容cn的两端并联了开关s1,开关s1用于调整倍压电路的输出电压的电压极性。
17、其中,该n级倍压电路可以是传统的n级倍压电路,可如图3a、图3e所示。电容cn的两端也是传统的n级倍压电路的输出端。
18、第三方面提供的倍压电路,通过在传统n级倍压电路的输出端与线圈负载之间串接开关s1,可控制加载于线圈两端的电压极性,从而改变流经线圈的电流的方向,最终改变马达推力方向。
19、结合第三方面,在一些实施例中,开关s1可以包括两个不动端p1、p2,不动端p1、p2分别耦接电容cn的两端,开关s1还包括:第一动端和第二动端,其中,第一动端包括一组动端t1、t3,第二动端包括一组动端t2、t4;当开关s1导通第一动端时,倍压电路通过第一动端输出第一极性的输出电压;当开关s1导通第二动端时,倍压电路通过第二动端输出第二极性的输出电压;第二极性与第一极性相反。
20、其中,p1、p2分别电连接电容cn的两端,t1、t4电连接线圈的第一端,t2、t3电连接线圈的第二端。
21、结合第三方面,在一些实施例中,开关s1可以是双刀双掷开关或者由两个单刀双掷开关组合而成。
22、结合第三方面,在一些实施例中,开关s1还可包括:控制端c1、c2。开关切换的控制信号可通过两个控制端c1、c2由控制器、ap等控制单元传入。
23、第四方面,本技术提供了一种包括音圈马达vcm的模组,该模组可包括:倍压电路、驱动集成电路,其中:倍压电路的输入端耦接于驱动集成电路的输出端,倍压电路的输出端耦接于音圈马达的线圈两端,倍压电路用于将驱动集成电路输出到输入端的输入电压升压后再输出到线圈两端。并且,倍压电路还用于改变输出到线圈两端的线圈电压的电压极性;当线圈电压的电压极性为第一极性时,线圈电流的方向为第一流向,vcm输出第一方向的马达推力;当线圈电压的电压极性为第二极性时,线圈电流的方向为第二流向,vcm输出第二方向的马达推力。
24、第四方面中,第一输入端和第二输入端之间加载的输入电压是交流电压信号。具体的,输入电压可以是脉冲宽度调制pwm电压信号。倍压电路可以是第二方面或者第三方面描述的倍压电路。
25、结合第四方面,在一些实施例中,模组可以为摄像头模组,还包括镜头;vcm用于输出马达推力带动镜头在光轴方向上移动,或者在光轴垂直平面上移动。
26、结合第四方面,在一些实施例中,倍压电路可以设置在摄像头模组的z方向空间,z方向和光轴平行。
27、结合第四方面,在一些实施例中,模组还可以包括图像传感器,倍压电路具体可以设置在镜头和图像传感器在z方向上形成的空腔内。
28、结合第四方面,在一些实施例中,倍压电路也可以部分或全部集成在驱动集成电路中。在部分集成时,倍压电路中的电容,或者电容和二极管不集成在驱动集成电路中。
29、结合第四方面,在一些实施例中,倍压电路还可以集成在vcm中。
30、第五方面,本技术提供了一种电子设备,可以包括:第一模组、控制单元,其中,第一模组可以是第四方面描述的模组,控制单元耦接第一模组,用于控制第一模组中的vcm的线圈电流的方向。
31、结合第五方面,在一些实施例中,控制单元具体可以耦接第一模组中的倍压电路;
32、结合第五方面,在一些实施例中,控制第一模组中的vcm的线圈电流的方向,具体可以包括:控制倍压电路输出到线圈两端的线圈电压的电压极性,其中,当线圈电压的电压极性为第一极性时,线圈电流的方向为第一流向;当线圈电压的电压极性为第二极性时,线圈电流的方向为第二流向。
33、结合第五方面,在一些实施例中,控制单元还可以耦接第一模组,用于控制模组中的vcm的线圈电流的大小。
34、结合第五方面,在一些实施例中,控制单元具体可以耦接第一模组中的驱动集成电路。控制模组中的vcm的线圈电流的大小,具体可以包括:控制驱动集成电路的输出电压的电平、放电占空比、频率中的一项或多项。
35、结合第五方面,在一些实施例中,第一模组可以为摄像头模组。
36、第六方面,本技术提供了一种电子设备,可以包括:马达系统和控制单元;其中,马达系统可以是第一方面描述马达系统,控制单元耦接马达系统中的倍压电路,用于控制马达系统中的vcm的线圈电流的方向。
37、结合第六方面,在一些实施例中,控制单元还可以耦接马达系统中驱动集成电路,用于控制驱动集成电路的输出电压的电平、放电占空比、频率中的一项或多项。
38、结合第六方面,在一些实施例中,马达系统可以设置在电子设备的摄像头模组中。
39、结合第六方面,在一些实施例中,马达系统中的vcm可以包括自动对焦vcm,自动对焦vcm用于带动摄像头模组中的镜头在光轴方向上移动。
40、结合第六方面,在一些实施例中,马达系统中的vcm还可以包括光学防抖vcm,光学防抖vcm用于带动摄像头模组中的镜头在光轴垂直平面上移动。
41、第七方面,本技术提供了一种马达控制方法,可应用于第五方面或第六方面描述的电子设备,该电子设备中的马达系统包括自动对焦vcm。该马达控制方法可以包括:电子设备检测到提高摄像头模组的光学变焦倍率的操作,响应于此,将自动对焦vcm的倍压电路中的开关s1切到第一动端导通。电子设备检测到降低摄像头模组的光学变焦倍率的操作,响应于此,将自动对焦vcm的倍压电路中的开关s1切到第二动端导通。
42、其中,在自动对焦vcm的倍压电路中的开关s1切到第一动端导通时,自动对焦vcm的线圈电流的方向为第一流向,摄像头模组中的镜头在光轴上向远离被拍摄事物的方向移动;在自动对焦vcm的倍压电路中的开关s1切到第二动端导通时,自动对焦vcm的线圈电流的方向为第二流向,镜头在光轴上向靠近被拍摄事物的方向移动,第二流向与第一流向相反。
43、第八方面,本技术提供了一种马达控制方法,可应用于第五方面或第六方面描述的电子设备,该电子设备中的马达系统包括光学防抖vcm。该马达控制方法可以包括:在开启摄像头模组采集图像时,电子设备检测到第三方向的设备抖动,响应于此,将光学防抖vcm的倍压电路中的开关s1切到第一动端导通。在开启摄像头模组采集图像时,电子设备检测到第四方向的设备抖动,响应于此,将光学防抖vcm的倍压电路中的开关s1切到第二动端导通。
44、其中,在光学防抖vcm的倍压电路中的开关s1切到第一动端导通时,光学防抖vcm的线圈电流的方向为第一流向,镜头在光轴平面上向第四方向移动;在光学防抖vcm的倍压电路中的开关s1切到第二动端导通时,光学防抖vcm的线圈电流的方向为第二流向,镜头在光轴平面上向第三方向移动。第四方向是第三方向的反方向,二者均是摄像头模组的光学防抖方向。
45、第七方面描述的方法和第八方面描述的方法可以结合实施,即电子设备可以间距自动对焦和光学防抖功能,并在自动对焦和光学防抖同时发生时应用第七方面、第八方面的方法,以调节各自vcm线圈的电流方向,以产生指定方向上的马达推力,完成自动对焦、光学防抖目标。
46、第九方面,本技术提供了一种电子设备,该电子设备可以包括,包括:摄像头、存储器和处理器,摄像头、存储器耦合于处理器,摄像头包括第一方面的马达系统,马达系统中的vcm包括自动对焦vcm,自动对焦vcm用于带动摄像头模组中的镜头在光轴方向上移动;存储器用于存储计算机程序,当处理器执行计算机程序时,使得电子设备执行第七方面描述的方法。
47、结合第九方面,在一些实施例中,马达系统中的vcm还可以包括光学防抖vcm,光学防抖vcm用于带动摄像头模组中的镜头在光轴垂直平面上移动;当处理器执行计算机程序时,使得电子设备执行第八方面描述的方法。
48、第十方面,本技术提供一种计算机可读存储介质,包括指令,当上述指令在电子设备上运行时,使得上述电子设备执行如第七方面、第八方面描述的方法。
49、第十一方面,本技术提供一种包含指令的计算机程序产品,当上述计算机程序产品在电子设备上运行时,使得上述电子设备执行如第七方面、第八方面描述的方法。
- 还没有人留言评论。精彩留言会获得点赞!